1. 伪代码所用包
一般会接触到的包有algorithm、algorithmic、algorithmicx、algorithm2e这四种包。
algorithm用于给伪代码提供一个浮动体环境,防止其换页或其他因素导致的内容中断,从而跨页显示。
algorithmic用于编辑伪代码的内容,一些for、while、if等语句通过该包中的命令进行编写。
algorithmicx可以看作algorithmic的升级版,提供了一些自定义命令
algorithm2e则是独立于algorithmic和algorithmicx的另一套伪代码环境,两套环境语法、排版上均不相同,本篇博文聚焦于algorithmicx环境中所用的一些简单命令,旨在简单快速上手LaTeX伪代码。
阅读此博文前,请先熟悉LaTeX基本语法,可参考本人博文:https://blog.csdn.net/Zerg_Wang/article/details/104120617
2. 环境构筑
algorithmic环境
\begin{algorithm}后面跟着的“H”是指定伪代码浮动体的位置,语法规则与普通浮动体一致。
\documentclass{article}
\usepackage{algorithm}
\usepackage{algorithmic}\begin{document}
\begin{algorithm}[H]\caption{title}%标题\label{alg1}%标签\begin{algorithmic}%这里是伪代码内容\end{algorithmic}
\end{algorithm}
\end{document}algorithmicx环境
若要使用algorithmicx的语法环境,调用包的时候将algorithmic包替换为一个叫algpseudocode的包即可(该包会自动调用algorithmicx包),其他地方与algorithmic的环境一致。
3. 语法规则
这里介绍较为常用的algorithmicx的语法命令(algorithmic命令与algorithmicx类似,区别是:前者的命令全为大写,后者仅首字母大写)
\State <text>
用于一般内容显示,当然不用该命令直接打内容也可以,但\State会为内容自动且正确地缩进,无论外面嵌套了多少个if或是循环。
\Return <text>
返回语句,一般配合\State使用:\State \Return <text>
\Comment {<text>}
注释内容,一般跟在\State命令正常内容之后,注释的内容在排版时是右对齐的。
条件判断语句
\If{<condition>} <text> \EndIf
\If{<condition>} <text> \Else <text> \EndIf
\If{<condition>} <text> \ElsIf{<condition>} <text> \Else <text> \EndIf
其中\ElsIf语句可以多重嵌套
效果展现:
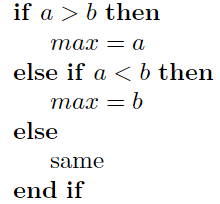
\If{$a>b$} \State $max = a$
\ElsIf{$a<b$}\State $max = b$
\Else \State same
\EndIf循环语句
\For{<condition>} <text> \EndFor
\ForAll{<condition>} <text> \EndFor
\While{<condition>} <text> \EndWhile
\Repeat <text> \Until{<condition>}
\Loop <text> \EndLoop
输入输出语句
\Require <text>
\Ensure <text>
当然,如果想改成“Input”“Output”形式,或者“输入”“输出”这种形式,可以在导言区重新定义该命令:
\renewcommand{\algorithmicrequire}{\textbf{自定义输入}}
\renewcommand{\algorithmicensure}{\textbf{自定义输出}}函数体
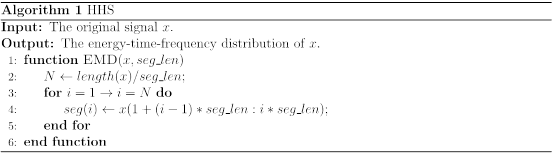
\Function{<name>}{<params>} <text> \EndFunction
特殊字符
以下字符仅用于algorithmic环境中
\TRUE \FALSE \AND \OR \XOR \NOT
4. 其他
显示行号
\begin{algorithmic}[1]“1”表示每行均显示行号,如果填“2”,意思是每2行显示一次行号。
标题与标号更改
如果不作额外更改,标题一行会显示为:
![]()
如果有多个伪代码,标号为2或者其他数字,则可以在编辑标题内容的语句(环境区)前加:
\setcounter{algorithm}{1}命令中的数字为1,显示的数字则为1+1=2,以次类推。
![]()
如果连标题中的“Algorithm”也要更改为其他内容,可在导言区自定义标签:
\floatname{algorithm}{自定义名}
5. 参考资料
https://zhuanlan.zhihu.com/p/145195565
http://hustsxh.is-programmer.com/posts/38801.html