伪代码是描述算法过程的一种语言,它可以直接用中文或者英文等自然语言表示,也可以直接上代码,但常用经典的语法表示(讲的就是这种)。日常生中,别人能通过你的描述明白相应算法就行。
小规范
1、不需要声明变量,变量名可以一定程度反映变量类型。
2、伪代码里没有 “{” “}” ,同一代码块用缩进表示。
3、数组用 数组名 + [0…n-1] 表示,如BubbleSort( A[0…n-1])
4、注释用双斜杠表示: //
5、赋值用箭头表示: ←
6、等于用一个等号表示: =
一、算法名称
算法名+(变量,… ,变量)
1、没有返回值。
2、变量不说明数据类型。
二、if-else语句
if <条件> then
else
if i=0 thena[j]←0;a[k]←0; //两行都是if语句的代码
else if i>0 then //else if语句没必要转行return 0;elsereturn 1;
三、for语句
for 变量←初值 to 终值 do
for i←0 to n-1 doa[i] ← 0;或者
for i←n to 0 doa[i] ← 0;
四、while语句
while 条件 do
while i < n doa[i] ← 0;五、返回值
return 返回值
if n = 1 return 1;
elsereturn 0;
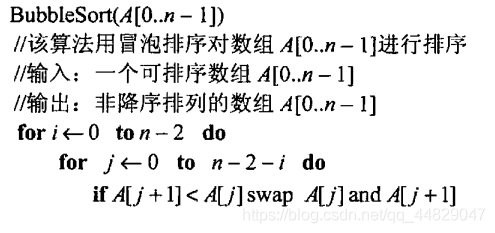
实例
预览一下冒泡排序的伪代码:
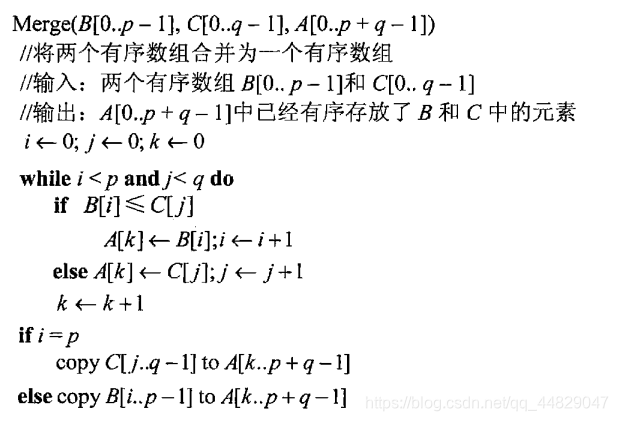
合并数组: