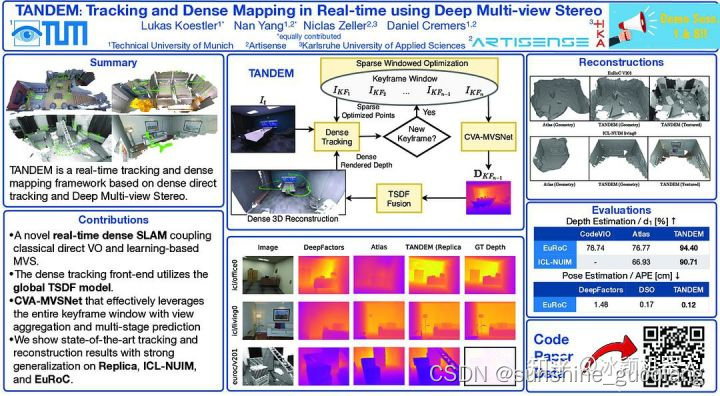
1.TANDEM:Tracking and Dense Mapping in Real-time using Deep Multi-view Stereo
慕尼黑工业大学Daniel Cremers团队,实时单目跟踪稠密建图纯视觉SLAM,采用Realsense D455(深度传感器+IMU,但只用RGB)
项目地址:https://vision.in.tum.de/research/vslam/tandem
论文地址:https://arxiv.org/pdf/2111.07418.pdf,https://vision.in.tum.de/_media/spezial/bib/koestler2021tandem.pdf
源码地址:https://github.com/tum-vision/tandem
2 . Fast Direct Stereo Visual SLAM
明尼苏达大学,快速准确立体视觉SLAM,不依赖于特征探测与匹配。作者从单目DSO扩展到双目系统,通过3D点最小光度误差优化双目配置尺度。
项目地址: Interactive Robotics and Vision Lab
论文地址:https://arxiv.org/pdf/2112.01890.pdf
源码地址:https://github.com/IRVLab/direct_stereo_slam
相关工作:Direct Sparse Odometry,A Photometrically Calibrated Benchmark For Monocular Visual Odometry,
https://github.com/JakobEngel/dso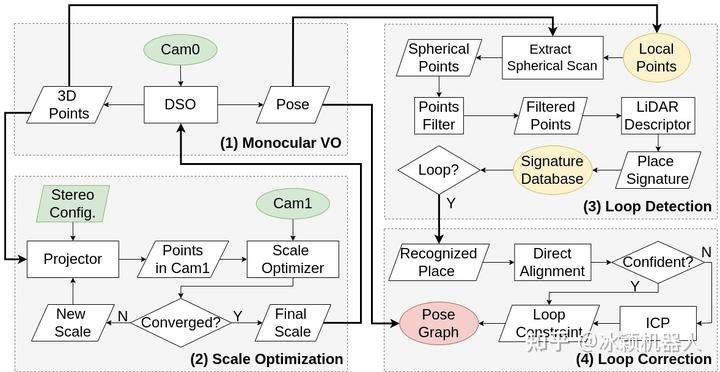
3.GVINS: tightly coupled GNSS-visual-inertial fusion for smooth and consistent state estimation
香港科技大学沈邵劼团队,之前开源VINS-Mono(https://github.com/HKUST-Aerial-Robotics/VINS-Mono),VINS-Fusion(https://github.com/HKUST-Aerial-Robotics/VINS-Fusion),GVINS是基于GNSS、视觉、惯导紧耦合多传感器融合平滑一致状态估计。
项目地址:https://uav.hkust.edu.hk/
论文地址:https://arxiv.org/pdf/2103.07899.pdf
源码地址:https://github.com/HKUST-Aerial-Robotics/GVINS
资源:http://www.rtklib.com/ 系统框架及VIO部分采用VINS-Mono,相机建模采用camodocal(https://github.com/hengli/camodocal),ceres(http://ceres-solver.org/)优化。
RTKLIB: An Open Source Program Package for GNSS Positioning,An Open Source Program Package for GNSS Positioning 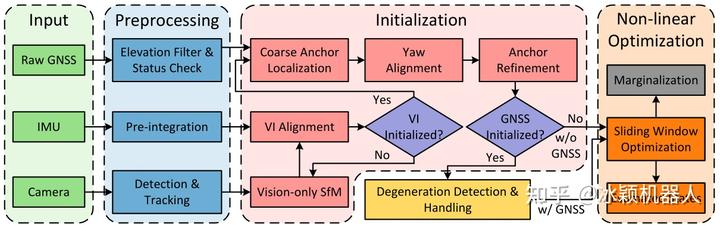
4. ==DSP-SLAM:Object Oriented SLAM with Deep Shape Priors ==
伦敦大学,基于ORB-SLAM2,面向对象语义SLAM 项目地址:https://jingwenwang95.github.io/dsp-slam/
论文地址:https://arxiv.org/pdf/2108.09481v2.pdf
源码地址:https://github.com/JingwenWang95/DSP-SLAM 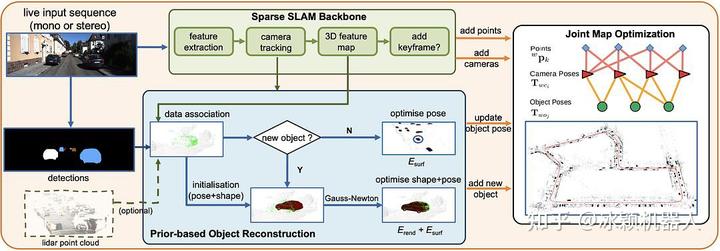
5.MegBA: A High-Performance and Distributed Library for Large-Scale Bundle Adjustment
爱丁堡大学、旷视科技,大规模BA算法 ,GPU分布式计算项目地址:
论文地址:https://arxiv.org/pdf/2112.01349.pdf,https://arxiv.org/pdf/2112.01349v2.pdf
源码地址:https://github.com/MegviiRobot/MegBA 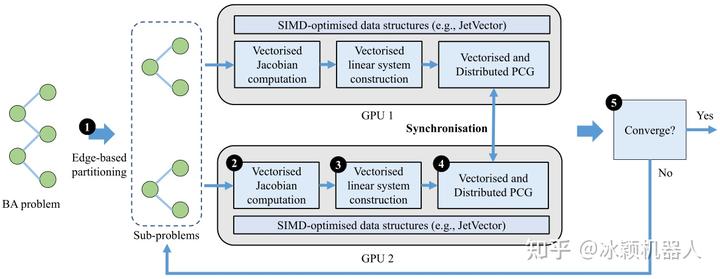
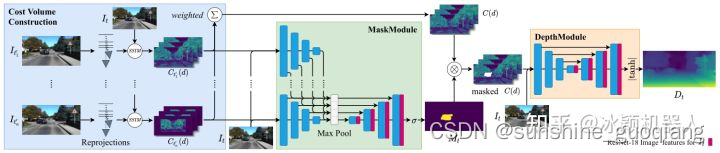
6.MonoRec : Semi-Supervised Dense Reconstruction in Dynamic Environments from a Single Moving Camera
慕尼黑工业大学Daniel Cremers团队,半监督单目稠密重建纯视觉SLAM
项目地址:https://vision.in.tum.de/research/monorec
论文地址:https://arxiv.org/pdf/2011.11814.pdf
源码地址:https://github.com/Brummi/MonoRec
7.Range-MCL:Range Image-based LiDAR Localization for Autonomous Vehicles波恩大学 Cyrill Stachniss团队,3D LiDAR户外激光SLAM,采用Passion表面重建和蒙特卡洛定位框架
项目地址:https://www.ipb.uni-bonn.de/research/,https://www.ipb.uni-bonn.de/data-software/
论文地址:https://arxiv.org/pdf/2105.12121.pdf
源码地址:https://github.com/PRBonn/range-mcl 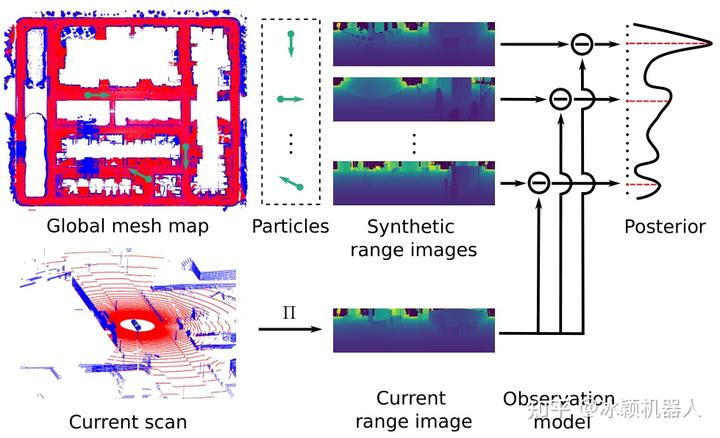
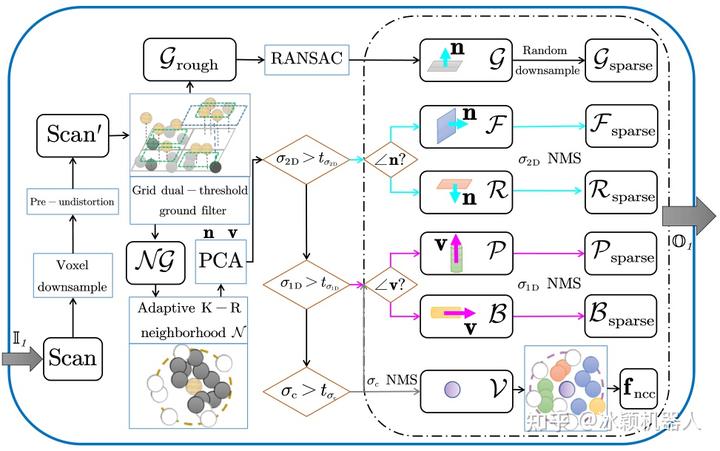
8.MULLS:Versatile LiDAR SLAM via Multi-metric Linear Least SquareETH
苏黎世联邦理工学院、EPFL洛桑联邦理工学院、禾赛科技
激光SLAM项目地址:https://baug.ethz.ch/en/,https://www.hesaitech.com/zh/,https://sti.epfl.ch/
论文地址:https://arxiv.org/pdf/2102.03771,https://arxiv.org/pdf/2102.03771v3
源码地址:https://github.com/YuePanEdward/MULLS 
9.LiLi-OM:Towards High-Performance Solid-State-LiDAR-Inertial Odometry and Mapping KIT
德国卡尔斯鲁厄理工学院,实时紧耦合激光雷达惯性里程计SLAM,特征提取参考固态激光雷达 Livox Horizon 与机械激光雷达Velodyne A-LOAM( HKUST-Aerial-Robotics ),可先参考开源VINS-Fusion(https://github.com/HKUST-Aerial-Robotics/VINS-Fusion)和 LIO-mapping(https://github.com/hyye/lio-mapping)。
项目地址: https://isas.iar.kit.edu/
论文地址:https://arxiv.org/pdf/2010.13150.pdf,https://arxiv.org/pdf/2010.13150v3 源码地址:https://github.com/KIT-ISAS/lili-om 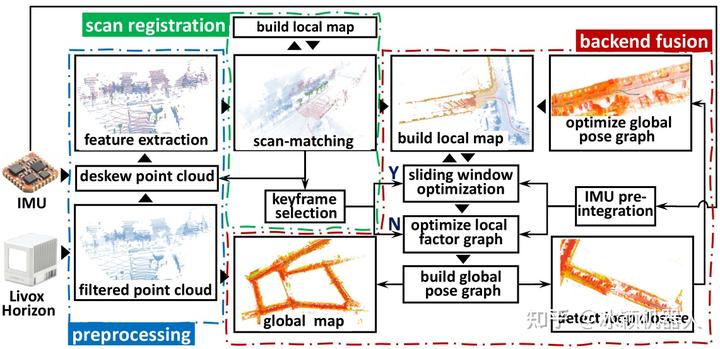
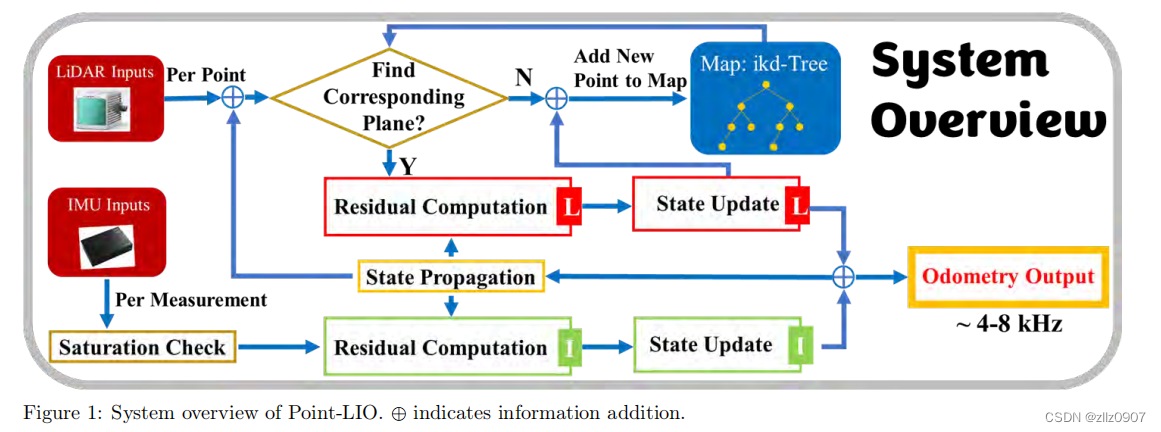
10.FAST-LIO2:Fast Direct LiDAR-inertial Odometry FAST-LIO: A Fast, Robust LiDAR-inertial Odometry Package by Tightly-Coupled Iterated Kalman Filter
香港大学张富团队,在FAST-LIO(高效鲁棒性LiDAR、惯性里程库,融合LiDAR特征点和IIMU数据,紧耦合快速EKF迭代)基础上采用ikd-Tree(https://github.com/hku-mars/ikd-Tree)增量建图,原始LiDAR点直接计算里程,支持外部IMU,并支持ARM平台。
项目地址:https://mars.hku.hk/
论文地址:https://arxiv.org/pdf/2107.06829.pdf,https://arxiv.org/pdf/2107.06829v1.pdf,https://arxiv.org/pdf/2010.08196v3.pdf
源码地址:https://github.com/hku-mars/FAST_LIO 相关工作 ikd-Tree: A state-of-art dynamic KD-Tree for 3D kNN search. https://github.com/hku-mars/ikd-TreeIKFOM: A Toolbox for fast and high-precision on-manifold Kalman filter. https://github.com/hku-mars/IKFoM UAV Avoiding Dynamic Obstacles: One of the implementation of FAST-LIO in robot’s planning.https://github.com/hku-mars/dyn_small_obs_avoidance R2LIVE: A high-precision LiDAR-inertial-Vision fusion work using FAST-LIO as LiDAR-inertial front-end.https://github.com/hku-mars/r2live UGV Demo: Model Predictive Control for Trajectory Tracking on Differentiable Manifolds.https://www.youtube.com/watch?v=wikgrQbE6Cs FAST-LIO-SLAM: The integration of FAST-LIO with Scan-Context loop closure module.https://github.com/gisbi-kim/FAST_LIO_SLAM FAST-LIO-LOCALIZATION: The integration of FAST-LIO with Re-localization function module.https://github.com/HViktorTsoi/FAST_LIO_LOCALIZATION 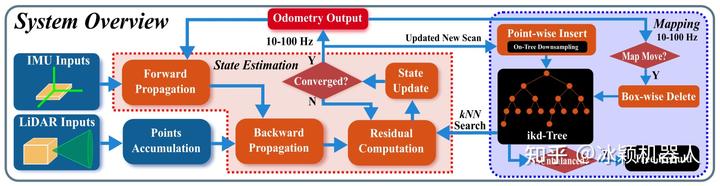
11.R3LIVE:A Robust, Real-time, RGB-colored, LiDAR-Inertial-Visual tightly-coupled state Estimation and mapping package
香港大学张富团队,在R2LIVE(FAST-LIO与VIO)基础上,LiDAR、惯导、视觉多传感器融合SLAM 项目地址:https://mars.hku.hk/
论文地址:https://arxiv.org/pdf/2109.07982.pdf,https://arxiv.org/pdf/2109.07982v1.pdf
源码地址:https://github.com/hku-mars/r3live,
(今天上传源代码) 相关工作
R2LIVE: A robust, real-time tightly-coupled multi-sensor fusion package.https://github.com/hku-mars/r2live
FAST-LIO: A computationally efficient and robust LiDAR-inertial odometry package.https://github.com/hku-mars/FAST_LIO ikd-Tree: A state-of-art dynamic KD-Tree for 3D kNN search.https://github.com/hku-mars/ikd-Tree LOAM-Livox: A robust LiDAR Odometry and Mapping (LOAM) package for Livox-LiDAR.https://github.com/hku-mars/loam_livox openMVS: A library for computer-vision scientists and especially targeted to the Multi-View Stereo reconstruction community.https://github.com/cdcseacave/openMVS VCGlib: An open source, portable, header-only Visualization and Computer Graphics Library.https://github.com/cnr-isti-vclab/vcglib CGAL: A C++ Computational Geometry Algorithms Library.https://www.cgal.org/,https://github.com/CGAL/cgal 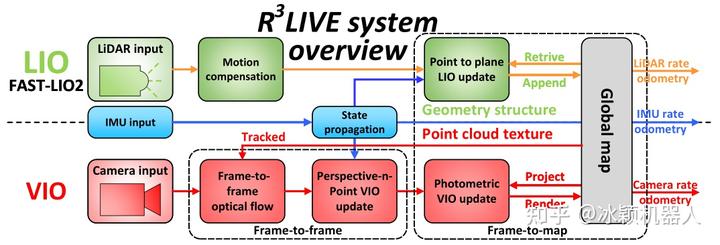
12.LVI-SAM:Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping
MIT麻省理工学院TixiaoShan(之前开源LIO-SAM,https://github.com/TixiaoShan/LIO-SAM),激光、视觉、惯性紧耦合多传感器融合SLAM,里程计建图系统层联合LIO-SAM与Vins-Mono优势,依赖与ROS、gtsam、Ceres库。
项目地址:https://git.io/lvi-sam,https://dusp.mit.edu/,https://senseable.mit.edu/,https://www.ams-institute.org/ 论文地址:https://arxiv.org/pdf/2104.10831.pdf,https://arxiv.org/pdf/2104.10831v2.pdf
源码地址:https://github.com/TixiaoShan/LVI-SAM 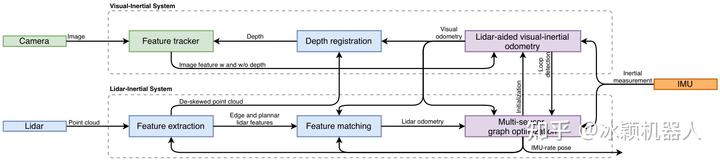
13. UV-SLAM: Unconstrained Line-based SLAM Using Vanishing Points for Structural Mapping
KAIST韩国科学技术院,采用消隐点实现无约束线特征结构化建图,克服传统线重投影测量模型中仅利用 Plücker坐标线法向量。
项目地址:Urban Robotics Lab论文地址:https://arxiv.org/pdf/2112.13515.pdf
源码地址:https://github.com/url-kaist/UV-SLAM,
源码即将上传 相关研究:Avoiding Degeneracy for Monocular Visual SLAM with Point and Line Features ALVIO: Adaptive Line and Point Feature-Based Visual Inertial Odometry for Robust Localization in Indoor Environments,源码未上传https://github.com/ankh88324/ALVIO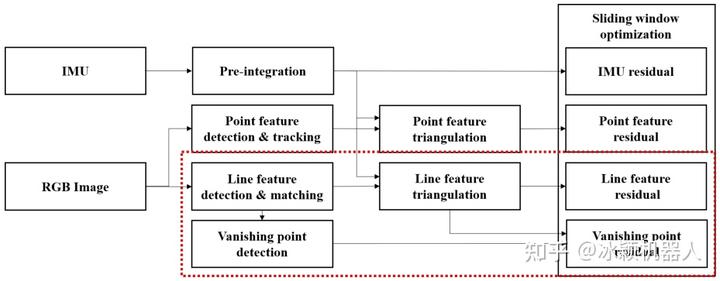
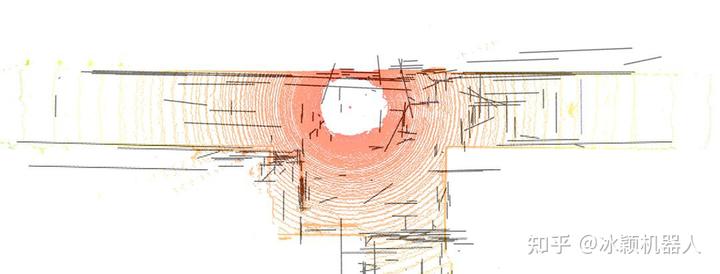
14. Autonomous Navigation System from Simultaneous Localization and Mapping
克拉克森大学, 基于slam室内导航软件架构,应用于智能轮椅
项目地址: 论文地址:https://arxiv.org/pdf/2112.07723.pdf,(OpenVSLAM)https://openvslam-community.readthedocs.io/_/downloads/en/latest/pdf/
源码地址:https://github.com/michealcarac/VSLAM-Mapping 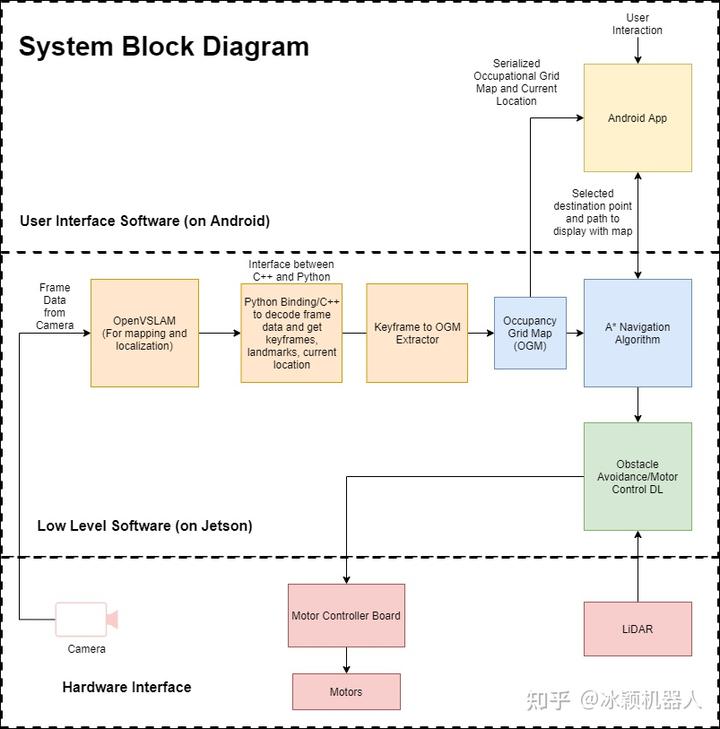
15. MSC-VO: Exploiting Manhattan and Structural Constraints for Visual Odometry
巴利阿里群岛大学,基于RGB-D视觉里程计,融合点与线特征,结构化约束。
项目地址:
论文地址:https://arxiv.org/pdf/2111.03408.pdf
源码地址:GitHub - joanpepcompany/MSC-VO: This repository includes an RGB-D VO system that combines both point and line features and leverages, if exist, structural regularities and the Manhattan axes of the scene.相关工作: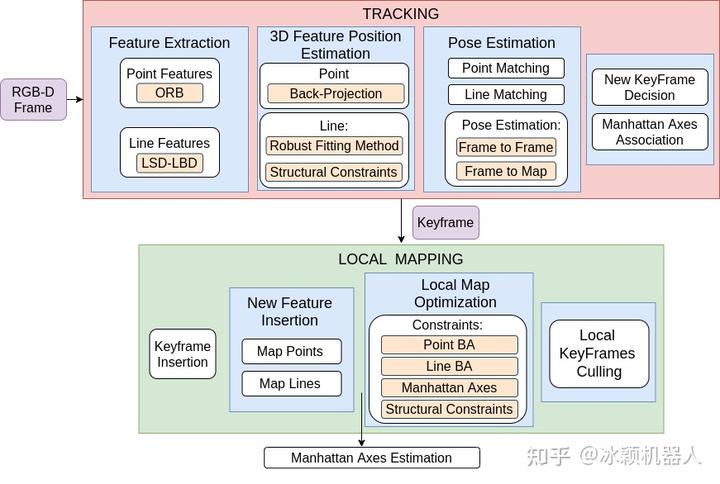








![[转] 程序员才懂的58张图片,哈哈哈哈哈哈哈哈哈哈哈哈哈哈哈](https://img-blog.csdnimg.cn/img_convert/4d2e650ba963f9de2934a3f5779c575a.png)
