20230522
补充一下:
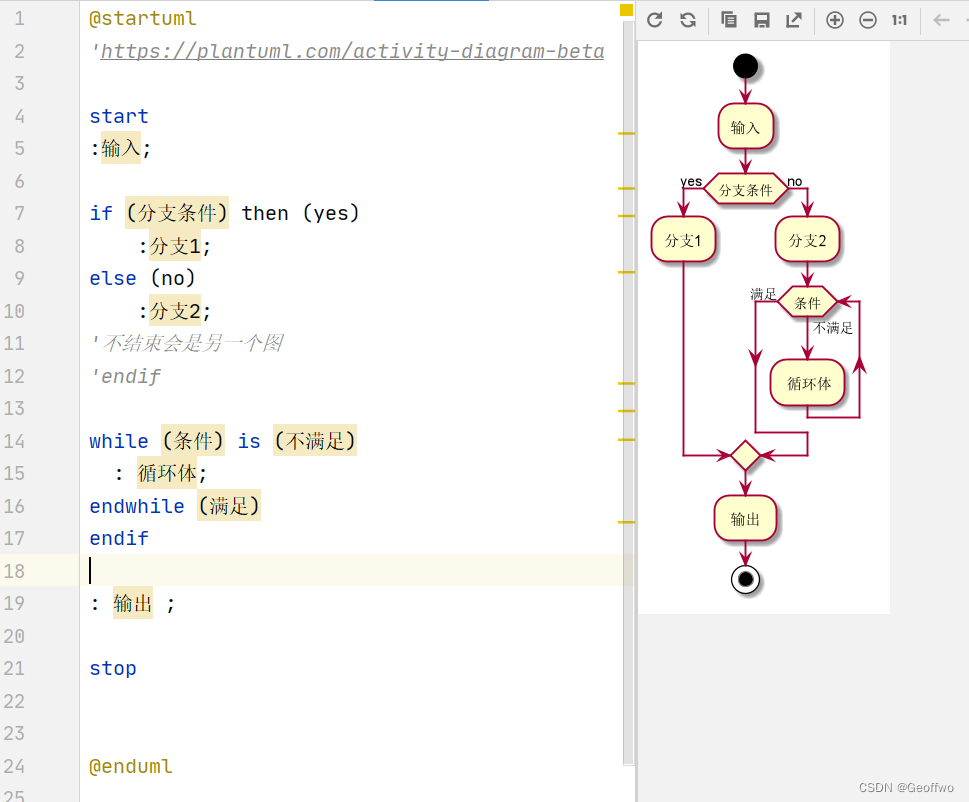
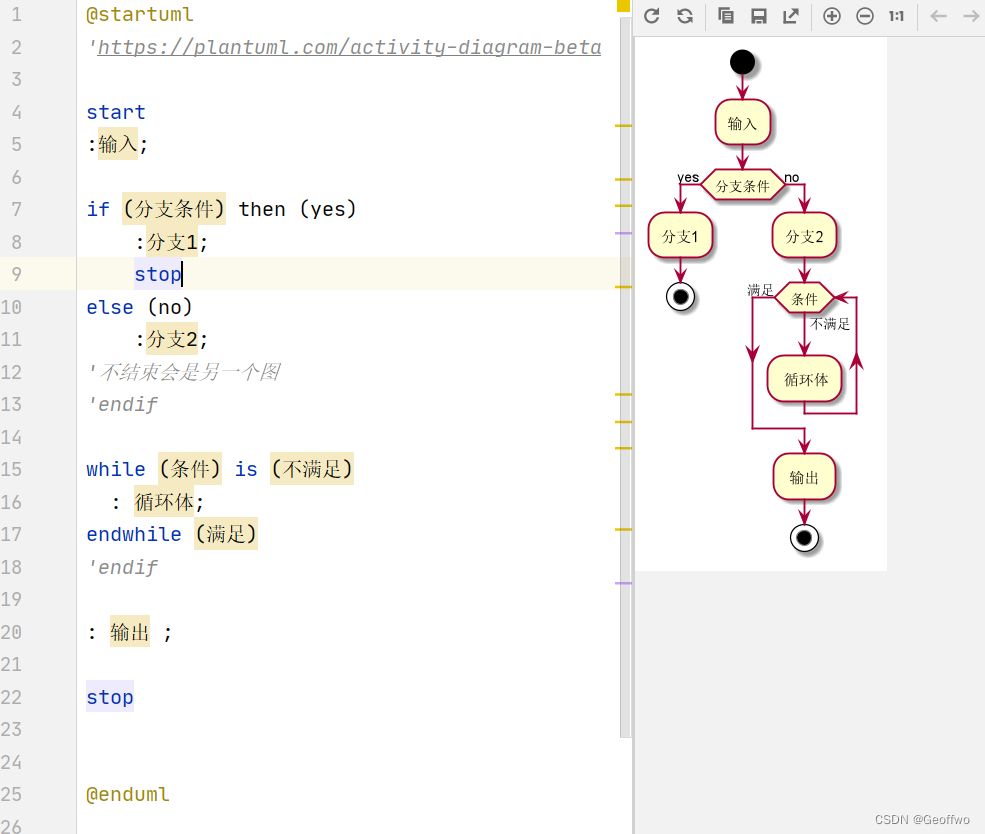
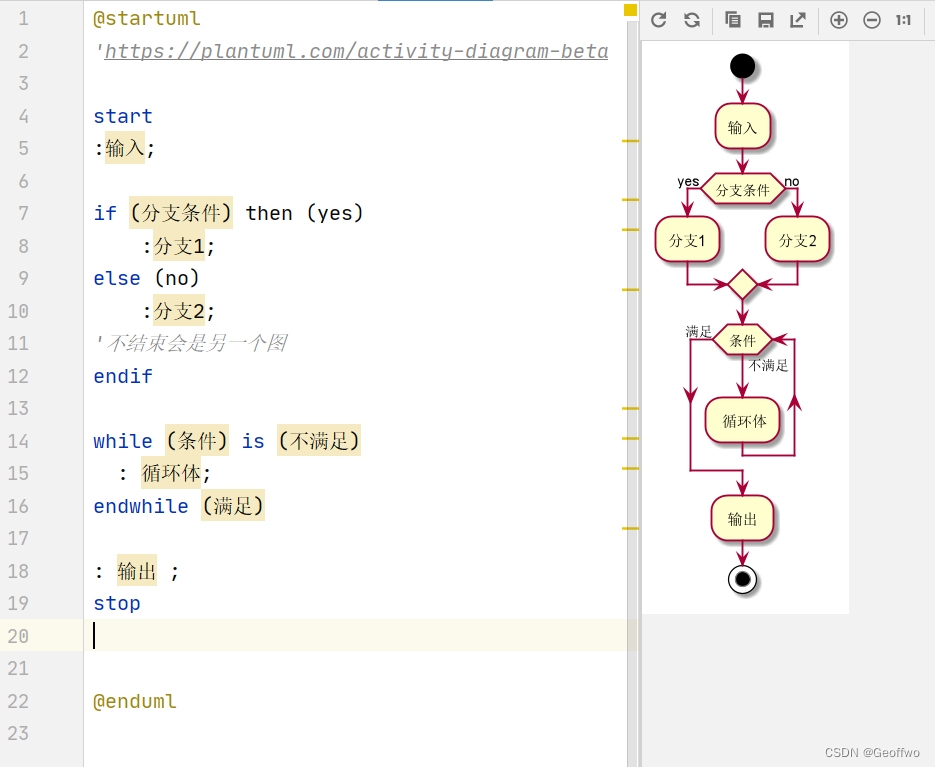
建议学习PUML的语法,这个和伪代码很相似,也可以看到业务流程图
问
根据IDEA项目代码生成伪代码的工具
答
目前没有根据IDEA项目代码自动生成伪代码的工具。伪代码是一种描述程序算法的语言,通常不是具体的编程语言,而是一种通用的伪语言。因此,要生成伪代码需要人工编写,通过对代码的分析和理解来实现。在实际开发中,伪代码通常被用作程序设计和测试的辅助工具,以帮助开发人员更好地理解算法和代码逻辑。
如果您需要生成伪代码来帮助程序设计和测试,可以尝试以下几种方法:
-
手动编写伪代码。通过对代码的分析和理解,手动编写伪代码来描述程序算法和逻辑。
-
使用伪代码生成器。有些伪代码生成器可以帮助您生成伪代码,但是它们通常需要您提供特定的输入格式,并且生成的结果可能需要手动调整和修改。
-
使用代码转换工具。一些代码转换工具可以将代码转换为伪代码,但是这种转换通常需要使用特定的转换规则和配置文件。
需要注意的是,伪代码只是一种辅助工具,不能完全代替实际的代码。在实际编程中,需要根据具体需求和问题来选择合适的编程语言和编程方式。
问
手动编写伪代码需要怎么写?
答
编写伪代码的主要目的是描述程序的算法和逻辑,以便于程序设计和测试。伪代码通常使用简单易懂的语言来描述程序的运行过程,与具体的编程语言无关,因此具有较高的可读性和可理解性。
下面是一些编写伪代码的简单指导:
-
描述算法的输入和输出。首先需要描述算法的输入和输出,以便于理解程序的功能和用途。
-
描述算法的基本步骤。其次需要描述算法的基本步骤,即程序运行的主要逻辑和流程。可以使用流程图、伪代码等方式进行描述。
-
使用简单易懂的语言。伪代码的语言应该尽可能简单易懂,避免使用过于复杂的语法和术语,以便于他人理解和使用。
-
使用注释和说明。在编写伪代码时,可以使用注释和说明来进一步解释程序的功能和逻辑,以便于他人理解和修改。
-
逐步完善伪代码。编写伪代码的过程应该是逐步完善的,可以先从大体逻辑开始描述,然后逐步补充细节和特殊情况。
下面是一个简单的伪代码示例,用来描述两个数相加的算法:
// 输入:两个整数 a 和 b
// 输出:它们的和 sumsum = a + b // 计算和
输出 sum
可以看到,这个伪代码使用简单的语言来描述了程序的输入、输出和主要逻辑,非常容易理解。当然,对于更复杂的算法和程序,需要更详细的伪代码描述,以便于理解和实现。