目录
归一化
1.归一化含义
2.为什么要归一化?
3.为什么归一化能提高求解最优解速度?
为什么引入BN?
BN的作用原理
BN的优点
BN的不足
BN、LN、IN和GN之间的区别
参考
归一化
1.归一化含义
- 归纳统一样本的统计分布性。归一化在0~1之间是统计的概率分布,归一化-1~1之间是统计的坐标分布。
- 无论是为了建模还是为了计算,首先基本度量单位要统一,神经网络是以样本在事件中的统计分别几率来进行训练(概率计算)和预测,且sigmoid函数的取值是0-1之间的,网络最后一个节点的输出也是如此,所以经常要对样本的输出归一化处理。
- 归一化是统一在0-1之间的统计概率分布,当所有样本的输入信号都为正值时,与第一隐含层神经元相连的权值只能同时增加或减少,从而导致学习速度很慢。
- 另外在数据中常存在奇异样本数据,奇异样本数据存在所引起的网络训练时间增加,并可能引起网络无法收敛。为了避免出现这种情况及后面数据处理的方便,加快网络学习速度,可以对输入信号进行归一化,使得所有样本的输入信号其均值接近于0或与其均方差相比很小。
2.为什么要归一化?
- 为了后面数据处理的方便,归一化的确可以避免- -些不必要的数值问题。
- 为了程序运行时收敛加快。
- 同一量纲。样本数据的评价标准不一样,需要对其量纲化,统一评价标准。 这算是应用层面的需求。
- 避免神经元饱和。啥意思?就是当神经元的激活在接近0或者1时会饱和,在这些区域,梯度几乎为0,这样,在反向传播过程中,局部梯度就会接近0,这会有效地”杀死"梯度。
- 保证输出数据中数值小的不被吞食。
3.为什么归一化能提高求解最优解速度?
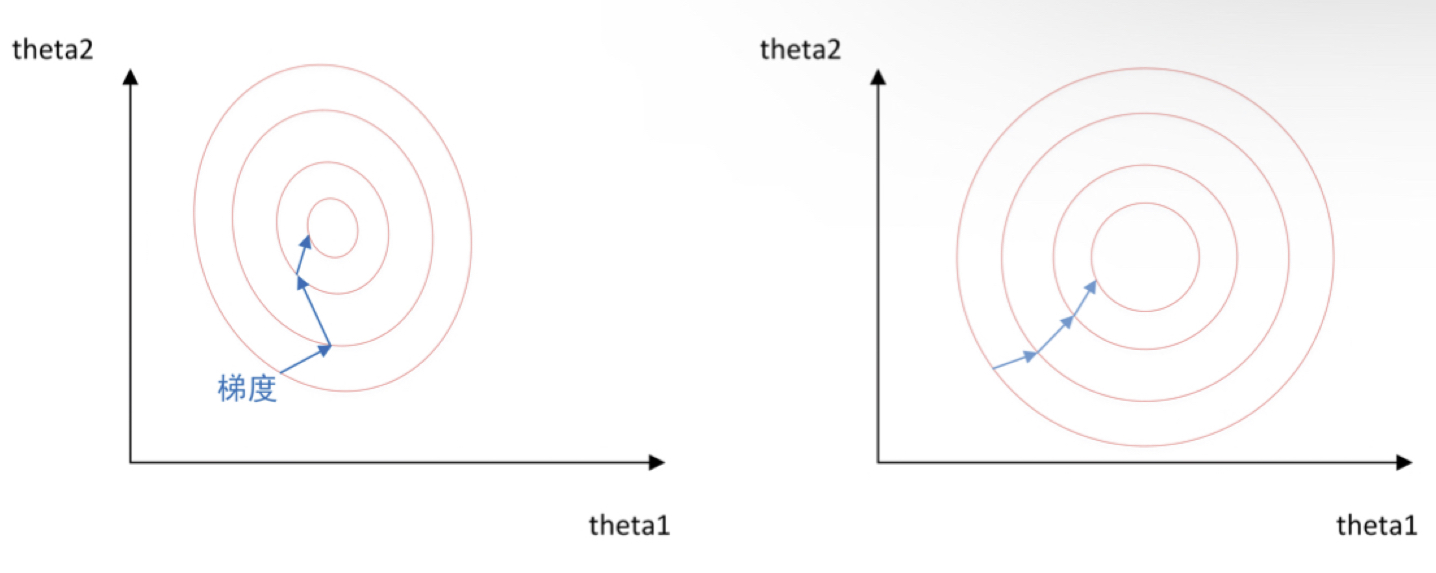
上图是代表数据是否均一化的最优解寻解过程(圆圈可以理解为等高线)。左图表示未经归一化操作的寻解过程,右图表示经过归一化后的寻解过程。
当使用梯度下降法寻求最优解时,很有可能走"之字型"路线(垂直等高线走),从而导致需要迭代很多次才能收敛;而右图对两个原始特征进行了归一化,其对应的等高线显得很圆,在梯度下降进行求解时能较快的收敛。
因此如果机器学习模型使用梯度下降法求最优解时,归一化往往非常有必要,否则很难收敛甚至不能收敛。
为什么引入BN?
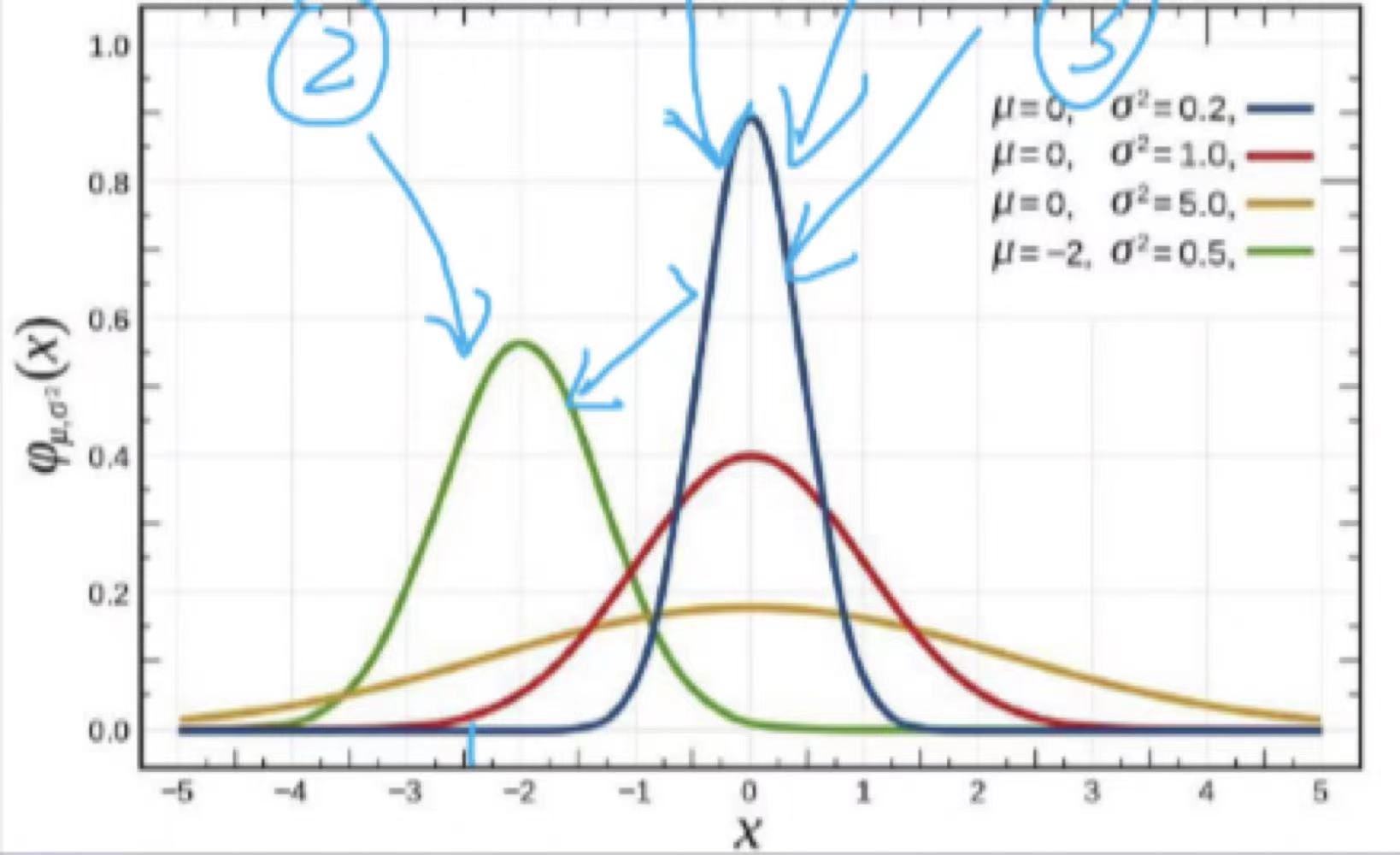
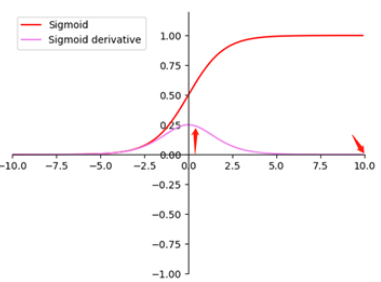
为加速网络的训练,在图像预处理时,我们就后对图像进行标准化操作,即image normalization,是的每张图片都能服从u均值σ标准差的分布。但是当图片输如到神经网络后,每经过一次卷积,数据就不会再服从该分布,这种现象叫做ICS(Internal Covariate Shift,内部协变量偏移),该现象会使输入分布变化,导致模型的训练困难,对深度神经网络影响极大,如左图所示,数据分布不统一,深层网络就需要去适应这些数据分布,从而导致网络训练速度慢。如果不进行归一化,直接进行激活,很可能一些新的数据会落入激活函数的饱和区,导致神经网络训练的梯度消失,如右图所示当feature map的数据为10的时候,就会落入饱和区,影响网络的训练效果。这个时候我们引入Batch Normalization的目的就是使我们卷积以后的feature map满足均值为0,方差为1的分布规律。BN本质是解决梯度消失的问题。
BN的作用原理
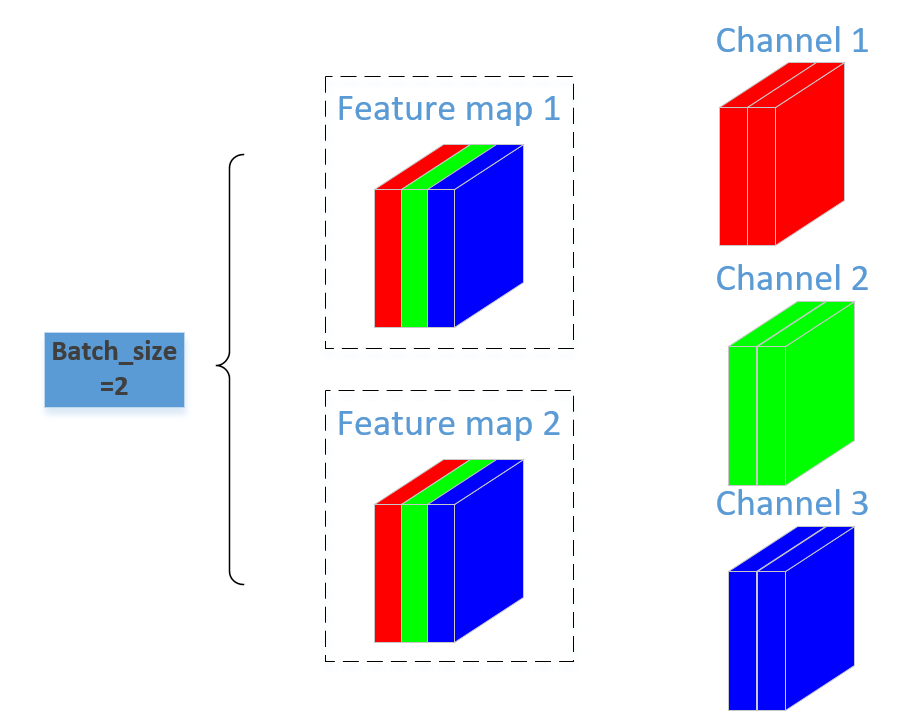
BN作用位置:BN是对同一个batch中不同样本图片(输入的image)之间的同一channel的神经元(像素)进行归一化。
如图所示,一个batch中有两个图片,每个图片有三个通道,我们进行BN的位置就是对该batch中不同图片的相同通道的像素进行归一化计算。
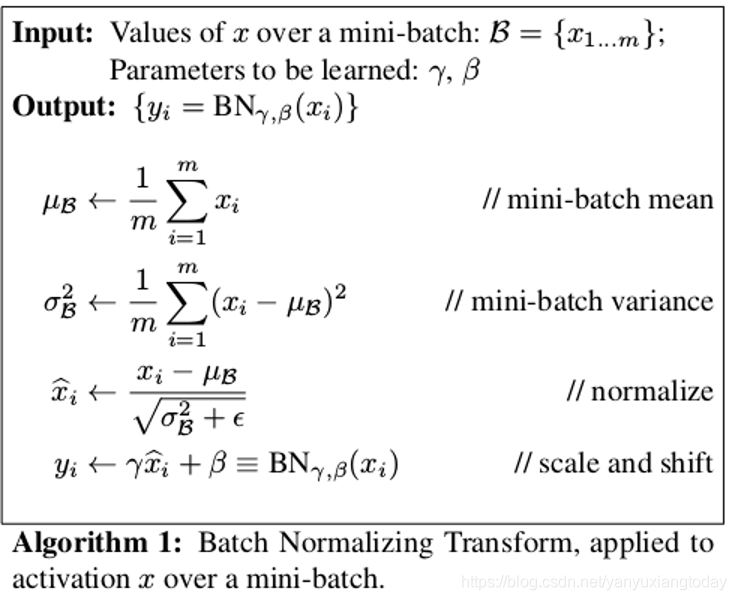
BN前向推导公式:
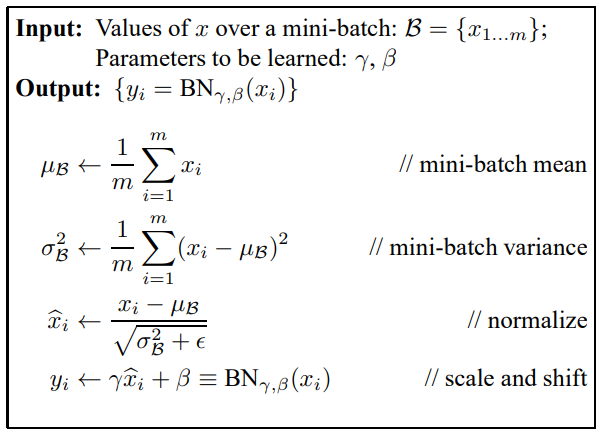
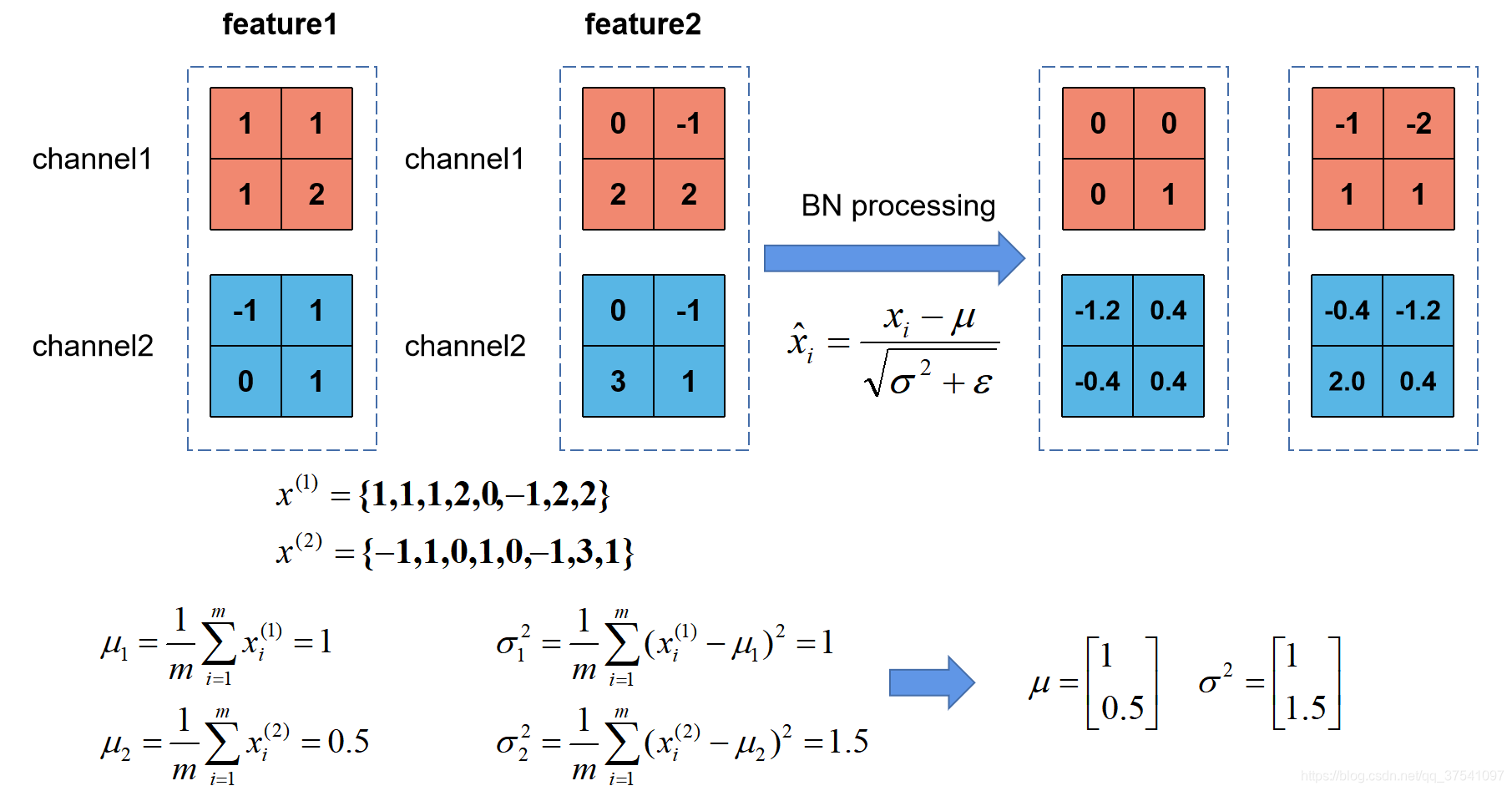
下面我们用一个例子来看看BN是如何计算的,以batchsize=2为例,每个feature map有两个通道。
首先对两个feature的相同位置的通道如channel1,计算整个channel1的均值=1和方差
=1,然后将channel1中每个像素减均值除标准差,得到右边归一化数据。同理,channel2做相同操作,得到归一化后的数据。最后将归一化后的每一个像素乘γ(缩放因子)加β(平移因子)得到BN的结果。
为什么引入γ和β?
- BN首先是得输入Normalization,对数据的分布进行额外的约束,使其变成均值为0,方差为1的分布,增强模型的泛化能力。normalization缓解了ICS,使得每一层的输入变得稳定,但是同时也降低了模型的拟合能力,缺乏了数据原有的表达能力,使得底层学习到的信息丢失,并且均值为0,方差为1,在经过sigmoid的时候,容易陷入到其线性区域,破坏了之前学习到的特征分布。所以引入γ(缩放因子)和β(平移因子),恢复数据的表达能力,对规范后的数据进行线性变换,与之前的网络层解耦,从而更加有利于优化的过程,提高模型的泛化能力。
BN的优点
- 减少梯度消失,加速网络训练,提高训练精度。
- 防止过拟合。
- 减少了对学习率的要求。可以使用初始很大的学习率或者选择了较小的学习率,算法也能够快速训练收敛。
- 减少人为选择参数。减少对初始化的依赖,在某些情况下可以取消dropout和L2正则项参数,或者采取更小的L2正则约束参数。
为什么BN可以加速网络训练?
- 低层的微弱变化会引起高层的输入分布的变化,高层的网络需要不断地调整去适应输入的变化。从而导致收敛速度慢,学习速度慢。所以在没有使用BN之前,我们都要选择一个小的学习率和合适的初始化参数。
BN的不足
-
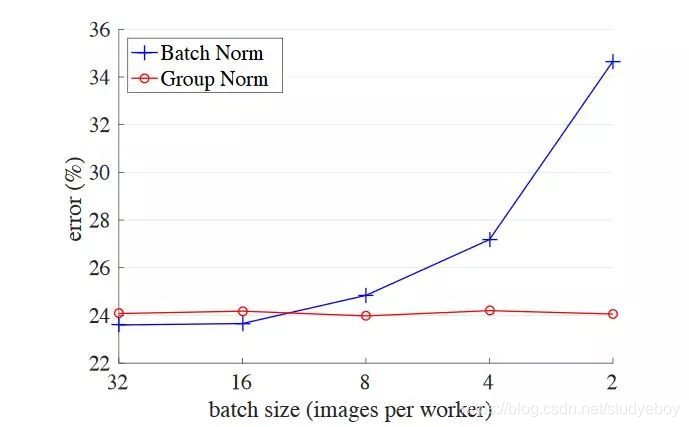
当batch size较小时(如2、4),该batch数据的均值和方差的代表性较差,因此对最后的结果影响也较大。随着batch size越来越小,BN层所计算的统计信息的可靠性越来越差,这样就容易导致最后错误率的上升;而在batch size较大时则没有明显的差别。虽然在分类算法中一般的GPU显存都能cover住较大的batch设置,但是在目标检测、分割以及视频相关的算法中,由于输入图像较大、维度多样以及算法本身原因等,batch size一般都设置比较小,所以GN对于这种类型算法的改进应该比较明显。
如上图,可见 BN 随着 batchsize 减小,性能下降比较明显。
由于BN训练的时候是基于一个 mini-batch 来计算均值和方差的,这相当于在梯度计算时引入噪声,如果 batchsize 很小的话, BN 就有很多不足。不适用于在线学习(batchsize = 1)当数据是大图片,并且一个batch一般都只有1-2张图片,不建议使用 BN。
为什么BN层一般在线性层和卷积层后面,而不是放在非线性单元后面?
因为非线性单元的输出分布形状会在训练过程中发生变化,归一化无法消除他的方差偏移,相反的,全连接层和卷积层的输出是一个对称的,非稀疏的分布,类似于高斯分布,对他们进行归一化会产生更加稳定的分布。如果像relu这样的激活函数,如果输入的数据是一个高斯分布,经过它变换之后的数据是什么形状?小于0的被抑制了,也就是分布小于0的部分直接变成0了。
BN比较适用的场景:
每个mini-batch比较大,数据分布比较接近。在进行训练之前,要做好充分的shuffle,否则效果会差很多。另外,由于BN需要在运行过程中统计每个mini-batch的一阶统计量和二阶统计量,因此不适用于动态的网络结构和RNN网络。
注意:
- 训练和测试时BN是不同的:训练时的均值方差来源于当前的mini-batch数据,而测试时,则要使用训练使用过的全部数据的均值方差,这一点训练时就通过移动均值方法计算并保存下来了。
使用BN时需要注意的问题
(1)训练时要将traning参数设置为True,在验证时将trainning参数设置为False。在pytorch中可通过创建 模型的model.train()和model.eval()方法控制。
(2)batch size尽可能设置大点,设置小后表现可能很糟糕,设置的越大求的均值和方差越接近整个训练集的均值和方差。
(3)一般将bn层放在卷积层(Conv)和激活层(例如Relu)之间,且卷积层不要使用偏置bias,该偏置可被BN层中的β给抵消掉。
下面我来用公式证明为什么不要使用篇置:

BN、LN、IN和GN之间的区别

- BatchNorm:batch 方向做归一化,算 N ∗ H ∗ W 的均值
- LayerNorm:channel 方向做归一化,算 C ∗ H ∗ W的均值
- InstanceNorm:一个 channel 内做归一化,算 H ∗ W 的均值
- GroupNorm:将 channel 方向分 group ,然后每个 group 内做归一化,算( C / / G ) ∗ H ∗ W 的均值
针对每一个 γ 和 β,GN 是对每一个 channel 进行学习的
其中两维 C 和 N 分别表示 channel 和 batch size,第三维表示 H,W,可以理解为该维度大小是 H ∗ W ,也就是拉长成一维,这样总体就可以用三维图形来表示。可以看出 BN 的计算和 batch size 相关(蓝色区域为计算均值和方差的单元),而 LN、BN 和 GN 的计算和 batch size 无关。同时 LN 和 IN 都可以看作是 GN 的特殊情况(LN 是 group=1 时候的 GN,IN 是 group=C 时候的GN)。
参考
BN的作用
Batch Normalization详解以及pytorch实验
一文搞懂BN的原理及其实现过程