目录
1. BatchNorm 原理
2. BatchNorm 的 PyTorch 实现
2.1 _NormBase 类
2.1.1 初始化
2.1.2 模拟 BN forward
2.1.3 running_mean、running_var 的更新
2.1.4 \gamma, \beta 的更新
2.1.5 eval 模式
2.2 BatchNormNd 类
3. SyncBatchNorm 的 PyTorch 实现
3.1 forward
3.2 backward
1. BatchNorm 原理
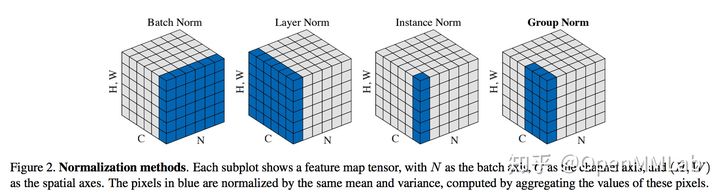
BatchNorm 最早在全连接网络中被提出,对每个神经元的输入做归一化。扩展到 CNN 中,就是对每个卷积核的输入做归一化,或者说在 channel 之外的所有维度做归一化。 BN 带来的好处有很多,这里简单列举几个:
- 防止过拟合:单个样本的输出依赖于整个 mini-batch,防止对某个样本过拟合;
- 加快收敛:梯度下降过程中,每一层的
和
都会不断变化,导致输出结果的分布在不断变化,后层网络就要不停地去适应这种分布变化。用 BN 后,可以使每一层输入的分布近似不变。
- 防止梯度弥散:forward 过程中,逐渐往非线性函数的取值区间的上下限两端靠近,(以 Sigmoid 为例),此时后面层的梯度变得非常小,不利于训练。
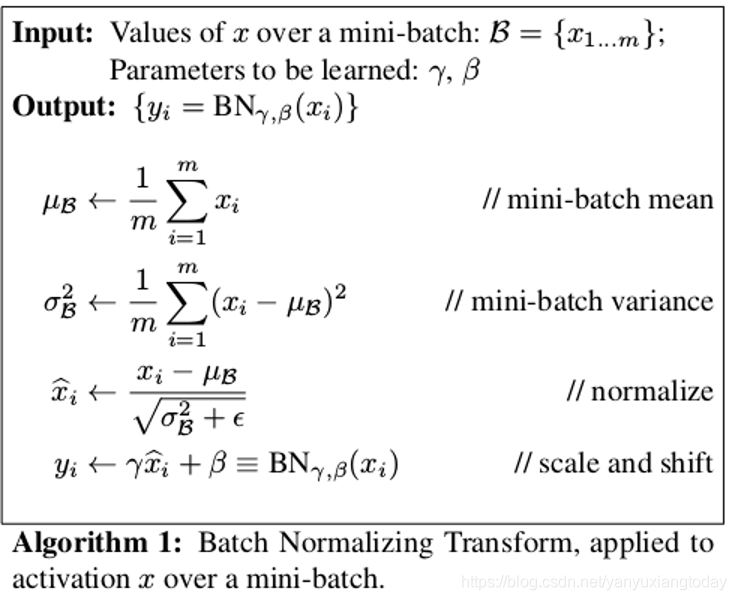
BN 的数学表达为:
这里引入了缩放因子 和平移因子
,作者在文章里解释了它们的作用:
- Normalize 到
,
, 会导致新的分布丧失从前层传递过来的特征与知识
- 以 Sigmoid 为例,加入
,
, 可以防止大部分值落在近似线性的中间部分,导致无法利用非线性的部分
2. BatchNorm 的 PyTorch 实现
PyTorch 中与 BN 相关的几个类放在 torch.nn.modules.batchnorm 中,包含以下几个类:
_NormBase:nn.Module的子类,定义了 BN 中的一系列属性与初始化、读数据的方法;_BatchNorm:_NormBase的子类,定义了forward方法;BatchNorm1d&BatchNorm2d&BatchNorm3d:_BatchNorm的子类,定义了不同的_check_input_dim方法。
2.1 _NormBase 类
2.1.1 初始化
_NormBase类定义了 BN 相关的一些属性,如下表所示:
| attribute | meaning |
|---|---|
| num_features | 输入的 channel 数 |
| track_running_stats | 默认为 True,是否统计 running_mean,running_var |
| running_mean | 训练时统计输入的 mean,之后用于 inference |
| running_var | 训练时统计输入的 var,之后用于 inference |
| momentum | 默认 0.1,更新 running_mean,running_var 时的动量 |
| num_batches_tracked | PyTorch 0.4 后新加入,当 momentum 设置为 None 时,使用 num_batches_tracked 计算每一轮更新的动量 |
| affine | 默认为 True,训练 weight 和 bias;否则不更新它们的值 |
| weight | 公式中的 \gamma,初始化为全 1 tensor |
| bias | 公式中的 \beta,初始化为全 0 tensor |
这里贴一下 PyTorch 的源码:
class _NormBase(Module):"""Common base of _InstanceNorm and _BatchNorm"""# 读checkpoint时会用version来区分是 PyTorch 0.4.1 之前还是之后的版本_version = 2__constants__ = ['track_running_stats', 'momentum', 'eps','num_features', 'affine']def __init__(self, num_features, eps=1e-5, momentum=0.1, affine=True,track_running_stats=True):super(_NormBase, self).__init__()self.num_features = num_featuresself.eps = epsself.momentum = momentumself.affine = affineself.track_running_stats = track_running_statsif self.affine:# 如果打开 affine,就使用缩放因子和平移因子self.weight = Parameter(torch.Tensor(num_features))self.bias = Parameter(torch.Tensor(num_features))else:self.register_parameter('weight', None)self.register_parameter('bias', None)# 训练时是否需要统计 mean 和 varianceif self.track_running_stats:# buffer 不会在self.parameters()中出现self.register_buffer('running_mean', torch.zeros(num_features))self.register_buffer('running_var', torch.ones(num_features))self.register_buffer('num_batches_tracked', torch.tensor(0, dtype=torch.long))else:self.register_parameter('running_mean', None)self.register_parameter('running_var', None)self.register_parameter('num_batches_tracked', None)self.reset_parameters()def reset_running_stats(self):if self.track_running_stats:self.running_mean.zero_()self.running_var.fill_(1)self.num_batches_tracked.zero_()def reset_parameters(self):self.reset_running_stats()if self.affine:init.ones_(self.weight)init.zeros_(self.bias)def _check_input_dim(self, input):# 具体在 BN1d, BN2d, BN3d 中实现,验证输入合法性raise NotImplementedErrordef extra_repr(self):return '{num_features}, eps={eps}, momentum={momentum}, affine={affine}, ' \'track_running_stats={track_running_stats}'.format(**self.__dict__)def _load_from_state_dict(self, state_dict, prefix, local_metadata, strict,missing_keys, unexpected_keys, error_msgs):version = local_metadata.get('version', None)if (version is None or version < 2) and self.track_running_stats:# at version 2: added num_batches_tracked buffer# this should have a default value of 0num_batches_tracked_key = prefix + 'num_batches_tracked'if num_batches_tracked_key not in state_dict:# 旧版本的checkpoint没有这个key,设置为0state_dict[num_batches_tracked_key] = torch.tensor(0, dtype=torch.long)super(_NormBase, self)._load_from_state_dict(state_dict, prefix, local_metadata, strict,missing_keys, unexpected_keys, error_msgs)class _BatchNorm(_NormBase):def __init__(self, num_features, eps=1e-5, momentum=0.1, affine=True,track_running_stats=True):super(_BatchNorm, self).__init__(num_features, eps, momentum, affine, track_running_stats)def forward(self, input):self._check_input_dim(input)# exponential_average_factor is set to self.momentum# (when it is available) only so that it gets updated# in ONNX graph when this node is exported to ONNX.if self.momentum is None:exponential_average_factor = 0.0else:exponential_average_factor = self.momentum# 如果在train状态且self.track_running_stats被设置为True,就需要更新统计量if self.training and self.track_running_stats:if self.num_batches_tracked is not None:self.num_batches_tracked = self.num_batches_tracked + 1# 如果momentum被设置为None,就用num_batches_tracked来加权if self.momentum is None:exponential_average_factor = 1.0 / float(self.num_batches_tracked)else: # use exponential moving averageexponential_average_factor = self.momentumreturn F.batch_norm(input, self.running_mean, self.running_var, self.weight, self.bias,self.training or not self.track_running_stats,exponential_average_factor, self.eps)2.1.2 模拟 BN forward
PyTorch 中 BN 的 Python 部分代码主要实现初始化、传参和底层方法调用。这里用 Python 模拟 BN 的底层计算。
import torch
import torch.nn as nn
import torch.nn.modules.batchnorm# 创建随机输入
def create_inputs():return torch.randn(8, 3, 20, 20)# 以 BatchNorm2d 为例
# mean_val, var_val 不为None时,不对输入进行统计,而直接用传进来的均值、方差
def dummy_bn_forward(x, bn_weight, bn_bias, eps, mean_val=None, var_val=None):if mean_val is None:mean_val = x.mean([0, 2, 3])if var_val is None:# 这里需要注意,torch.var 默认算无偏估计,因此需要手动设置unbiased=Falsevar_val = x.var([0, 2, 3], unbiased=False)x = x - mean_val[None, ..., None, None]x = x / torch.sqrt(var_val[None, ..., None, None] + eps)x = x * bn_weight[..., None, None] + bn_bias[..., None, None]return mean_val, var_val, x验证 dummy BN 输出的正确性:
bn_layer = nn.BatchNorm2d(num_features=3)
inputs = create_inputs()
# 用 pytorch 的实现 forward
bn_outputs = bn_layer(inputs)
# 用 dummy bn 来 forward
_, _, expected_outputs = dummy_bn_forward(inputs, bn_layer.weight, bn_layer.bias, bn_layer.eps)
assert torch.allclose(expected_outputs, bn_outputs)没有报异常,因此计算的值是正确的。
2.1.3 running_mean、running_var 的更新
BatchNorm 默认打开 track_running_stats,因此每次 forward 时都会依据当前 minibatch 的统计量来更新 running_mean 和 running_var。
momentum 默认值为 0.1,控制历史统计量与当前 minibatch 在更新 running_mean、running_var 时的相对影响。
running_mean = running_mean * (1 - momentum) + E[x] * momentum,
running_var= running_var * (1 - momentum) + Var[x] * momentum,
其中 、
分别表示
的均值、方差;需要注意这里统计方差时用了无偏估计,与论文保持一致。手动对这一过程进行模拟,如下所示:
running_mean = torch.zeros(3)
running_var = torch.ones_like(running_mean)
momentum = 0.1 # 这也是BN初始化时momentum默认值
bn_layer = nn.BatchNorm2d(num_features=3, momentum=momentum)# 模拟 forward 10 次
for t in range(10):inputs = create_inputs()bn_outputs = bn_layer(inputs)inputs_mean, inputs_var, _ = dummy_bn_forward(inputs, bn_layer.weight, bn_layer.bias, bn_layer.eps)n = inputs.numel() / inputs.size(1)# 更新 running_var 和 running_meanrunning_var = running_var * (1 - momentum) + momentum * inputs_var * n / (n - 1)running_mean = running_mean * (1 - momentum) + momentum * inputs_meanassert torch.allclose(running_var, bn_layer.running_var)
assert torch.allclose(running_mean, bn_layer.running_mean)
print(f'bn_layer running_mean is {bn_layer.running_mean}')
print(f'dummy bn running_mean is {running_mean}')
print(f'bn_layer running_var is {bn_layer.running_var}')
print(f'dummy bn running_var is {running_var}')输出结果:
bn_layer running_mean is tensor([ 0.0101, -0.0013, 0.0101])
dummy bn running_mean is tensor([ 0.0101, -0.0013, 0.0101])
bn_layer running_var is tensor([0.9857, 0.9883, 1.0205])
dummy bn running_var is tensor([0.9857, 0.9883, 1.0205])running_mean 的初始值为 0,forward 后发生变化。同时模拟 BN 的running_mean,running_var 也与 PyTorch 实现的结果一致。
以上讨论的是使用momentum的情况。在 PyTorch 0.4.1 后,加入了num_batches_tracked属性,统计 BN 一共 forward 了多少个 minibatch。当momentum被设置为None时,就由num_batches_tracked来控制历史统计量与当前 minibatch 的影响占比:
q = 1.0/num_batches_tracked,
running_mean= running_mean * (1 - q) + E[x] * q,
running_var = running_var * (1 - q) + Var[x] * q.
接下来手动模拟这一过程:
running_mean = torch.zeros(3)
running_var = torch.ones_like(running_mean)
num_batches_tracked = 0
# momentum 设置成 None,用 num_batches_tracked 来更新统计量
bn_layer = nn.BatchNorm2d(num_features=3, momentum=None)# 同样是模拟 forward 10次
for t in range(10):inputs = create_inputs()bn_outputs = bn_layer(inputs)inputs_mean, inputs_var, _ = dummy_bn_forward(inputs, bn_layer.weight, bn_layer.bias, bn_layer.eps)num_batches_tracked += 1# exponential_average_factoreaf = 1.0 / num_batches_trackedn = inputs.numel() / inputs.size(1)# 更新 running_var 和 running_meanrunning_var = running_var * (1 - eaf) + eaf * inputs_var * n / (n - 1)running_mean = running_mean * (1 - eaf) + eaf * inputs_meanassert torch.allclose(running_var, bn_layer.running_var)
assert torch.allclose(running_mean, bn_layer.running_mean)bn_layer.train(mode=False)
inference_inputs = create_inputs()
bn_outputs = bn_layer(inference_inputs)
_, _, dummy_outputs = dummy_bn_forward(inference_inputs, bn_layer.weight,bn_layer.bias, bn_layer.eps,running_mean, running_var)
assert torch.allclose(dummy_outputs, bn_outputs)
print(f'bn_layer running_mean is {bn_layer.running_mean}')
print(f'dummy bn running_mean is {running_mean}')
print(f'bn_layer running_var is {bn_layer.running_var}')
print(f'dummy bn running_var is {running_var}')输出:
bn_layer running_mean is tensor([-0.0040, 0.0074, -0.0162])
dummy bn running_mean is tensor([-0.0040, 0.0074, -0.0162])
bn_layer running_var is tensor([1.0097, 1.0086, 0.9815])
dummy bn running_var is tensor([1.0097, 1.0086, 0.9815])手动模拟的结果与 PyTorch 相同。
2.1.4 , 的更新
BatchNorm 的 weight,bias 分别对应公式里的 ,
, 更新方式是梯度下降法。
import torchvision
from torchvision.transforms import Normalize, ToTensor, Compose
import torch.nn.functional as F
from torch.utils.data.dataloader import DataLoader# 用 mnist 作为 toy dataset
mnist = torchvision.datasets.MNIST(root='mnist', download=True, transform=ToTensor())
dataloader = DataLoader(dataset=mnist, batch_size=8)# 初始化一个带 BN 的简单模型
toy_model = nn.Sequential(nn.Linear(28 ** 2, 128), nn.BatchNorm1d(128),nn.ReLU(), nn.Linear(128, 10), nn.Sigmoid())
optimizer = torch.optim.SGD(toy_model.parameters(), lr=0.1)bn_1d_layer = toy_model[1]
print(f'Initial weight is {bn_layer.weight[:4].tolist()}...')
print(f'Initial bias is {bn_layer.bias[:4].tolist()}...\n')
# 模拟更新2次参数
for (i, data) in enumerate(dataloader):output = toy_model(data[0].view(data[0].shape[0], -1))(F.cross_entropy(output, data[1])).backward()# 输出部分参数的梯度,验证weight和bias确实是通过gradient descent更新的print(f'Gradient of weight is {bn_1d_layer.weight.grad[:4].tolist()}...')print(f'Gradient of bias is {bn_1d_layer.bias.grad[:4].tolist()}...')optimizer.step()optimizer.zero_grad()if i == 1:break
print(f'\nNow weight is {bn_1d_layer.weight[:4].tolist()}...')
print(f'Now bias is {bn_1d_layer.bias[:4].tolist()}...')inputs = torch.randn(4, 128)
bn_outputs = bn_1d_layer(inputs)
new_bn = nn.BatchNorm1d(128)
bn_outputs_no_weight_bias = new_bn(inputs)assert not torch.allclose(bn_outputs, bn_outputs_no_weight_bias)输出:
Initial weight is [0.9999354481697083, 1.0033478736877441, 1.0019147396087646, 0.9986106157302856]...
Initial bias is [-0.0012734815245494246, 0.001349383033812046, 0.0013358002761378884, -0.0007148777367547154]...Gradient of weight is [-0.0004475426103454083, -0.0021388232707977295, -0.0032624618615955114, -0.0009599098702892661]...
Gradient of bias is [0.00011698803427862003, -0.001291472464799881, -0.0023048489820212126, -0.0009493136312812567]...
Gradient of weight is [-0.00035325769567862153, -0.0014295700239017606, -0.002102235099300742, 0.000851186050567776]...
Gradient of bias is [-0.00026844028616324067, -0.00025666248984634876, -0.0017800561618059874, 0.00024933076929301023]...Now weight is [1.0000154972076416, 1.0037046670913696, 1.0024511814117432, 0.9986214637756348]...
Now bias is [-0.0012583363568410277, 0.0015041964361444116, 0.0017442908138036728, -0.0006448794738389552]...2.1.5 eval 模式
上面验证的都是 train 模式下 BN 的表现,eval 模式有几个重要的参数。
track_running_stats默认为True,train 模式下统计running_mean和running_var,eval 模式下用统计数据作为和
。设置为
False时,eval模式直接计算输入的均值和方差。running_mean、running_var:train 模式下的统计量。
也就是说,BN.training 并不是决定 BN 行为的唯一参数。满足BN.training or not BN.track_running_stats就会直接计算输入数据的均值方差,否则用统计量代替。
# 切换到eval模式
bn_layer.train(mode=False)
inference_inputs = create_inputs()
# 输出前后的 running_mean 和 running_var,验证eval模式下不再更新统计量
print(f'bn_layer running_mean is {bn_layer.running_mean}')
print(f'bn_layer running_var is {bn_layer.running_var}')
bn_outputs = bn_layer(inference_inputs)
print(f'Now bn_layer running_mean is {bn_layer.running_mean}')
print(f'Now bn_layer running_var is {bn_layer.running_var}')
# 用之前统计的running_mean和running_var替代输入的running_mean和running_var
_, _, dummy_outputs = dummy_bn_forward(inference_inputs, bn_layer.weight,bn_layer.bias, bn_layer.eps,running_mean, running_var)
assert torch.allclose(dummy_outputs, bn_outputs)# 关闭track_running_stats后,即使在eval模式下,也会去计算输入的mean和var
bn_layer.track_running_stats = False
bn_outputs_notrack = bn_layer(inference_inputs)
_, _, dummy_outputs_notrack = dummy_bn_forward(inference_inputs, bn_layer.weight,bn_layer.bias, bn_layer.eps)assert torch.allclose(dummy_outputs_notrack, bn_outputs_notrack)
assert not torch.allclose(bn_outputs, bn_outputs_notrack)输出结果如下:
bn_layer running_mean is tensor([-0.0143, 0.0089, -0.0062])
bn_layer running_var is tensor([0.9611, 1.0380, 1.0181])
Now bn_layer running_mean is tensor([-0.0143, 0.0089, -0.0062])
Now bn_layer running_var is tensor([0.9611, 1.0380, 1.0181])2.2 BatchNormNd 类
包括BatchNorm1d,BatchNorm2d,BatchNorm3d。区别只是检查了输入的合法性,这里简单贴一下BatchNorm2d的实现:
class BatchNorm2d(_BatchNorm):def _check_input_dim(self, input):if input.dim() != 4:raise ValueError('expected 4D input (got {}D input)'.format(input.dim()))BatchNorm1d接受 2D 或 3D 的输入,BatchNorm2d接受 4D 的输入,BatchNorm3d接受 5D 的输入。
3. SyncBatchNorm 的 PyTorch 实现
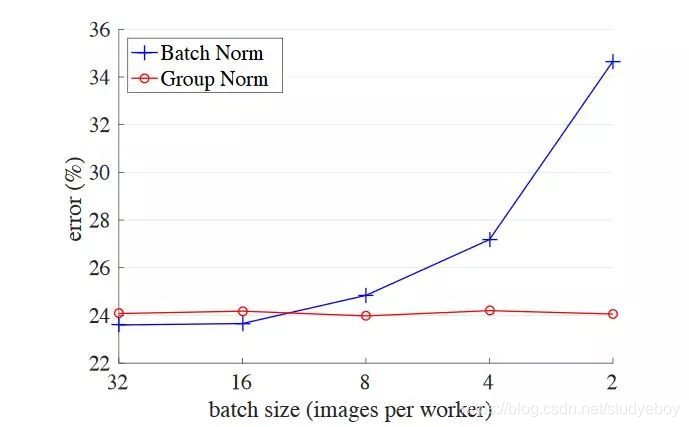
BN 的性能和 batch size 有很大的关系。batch size 越大,BN 的统计量也会越准。然而像检测这样的任务,占用显存较高,一张显卡往往只能拿较少的图片(比如 2 张)来训练,这就导致 BN 的表现变差。一个解决方式是 SyncBN:所有卡共享同一个 BN,得到全局的统计量。
PyTorch 的 SyncBN 分别在 torch/nn/modules/batchnorm.py 和 torch/nn/modules/_functions.py 做了实现。前者主要负责检查输入合法性,以及根据momentum等设置进行传参,调用后者。后者负责计算单卡统计量以及进程间通信。
class SyncBatchNorm(_BatchNorm):def __init__(self, num_features, eps=1e-5, momentum=0.1, affine=True,track_running_stats=True, process_group=None):super(SyncBatchNorm, self).__init__(num_features, eps, momentum, affine, track_running_stats)self.process_group = process_group# gpu_size is set through DistributedDataParallel initialization. This is to ensure that SyncBatchNorm is used# under supported condition (single GPU per process)self.ddp_gpu_size = Nonedef _check_input_dim(self, input):if input.dim() < 2:raise ValueError('expected at least 2D input (got {}D input)'.format(input.dim()))def _specify_ddp_gpu_num(self, gpu_size):if gpu_size > 1:raise ValueError('SyncBatchNorm is only supported for DDP with single GPU per process')self.ddp_gpu_size = gpu_sizedef forward(self, input):if not input.is_cuda:raise ValueError('SyncBatchNorm expected input tensor to be on GPU')self._check_input_dim(input)# exponential_average_factor is set to self.momentum# (when it is available) only so that it gets updated# in ONNX graph when this node is exported to ONNX.# 接下来这部分与普通BN差别不大if self.momentum is None:exponential_average_factor = 0.0else:exponential_average_factor = self.momentumif self.training and self.track_running_stats:self.num_batches_tracked = self.num_batches_tracked + 1if self.momentum is None: # use cumulative moving averageexponential_average_factor = 1.0 / self.num_batches_tracked.item()else: # use exponential moving averageexponential_average_factor = self.momentum# 如果在train模式下,或者关闭track_running_stats,就需要同步全局的均值和方差need_sync = self.training or not self.track_running_statsif need_sync:process_group = torch.distributed.group.WORLDif self.process_group:process_group = self.process_groupworld_size = torch.distributed.get_world_size(process_group)need_sync = world_size > 1# 如果不需要同步,SyncBN的行为就与普通BN一致if not need_sync:return F.batch_norm(input, self.running_mean, self.running_var, self.weight, self.bias,self.training or not self.track_running_stats,exponential_average_factor, self.eps)else:if not self.ddp_gpu_size:raise AttributeError('SyncBatchNorm is only supported within torch.nn.parallel.DistributedDataParallel')return sync_batch_norm.apply(input, self.weight, self.bias, self.running_mean, self.running_var,self.eps, exponential_average_factor, process_group, world_size)# 把普通BN转为SyncBN, 主要做一些参数拷贝@classmethoddef convert_sync_batchnorm(cls, module, process_group=None):module_output = moduleif isinstance(module, torch.nn.modules.batchnorm._BatchNorm):module_output = torch.nn.SyncBatchNorm(module.num_features,module.eps, module.momentum,module.affine,module.track_running_stats,process_group)if module.affine:with torch.no_grad():module_output.weight.copy_(module.weight)module_output.bias.copy_(module.bias)# keep requires_grad unchangedmodule_output.weight.requires_grad = module.weight.requires_gradmodule_output.bias.requires_grad = module.bias.requires_gradmodule_output.running_mean = module.running_meanmodule_output.running_var = module.running_varmodule_output.num_batches_tracked = module.num_batches_trackedfor name, child in module.named_children():module_output.add_module(name, cls.convert_sync_batchnorm(child, process_group))del modulereturn module_output3.1 forward
复习一下方差的计算方式:
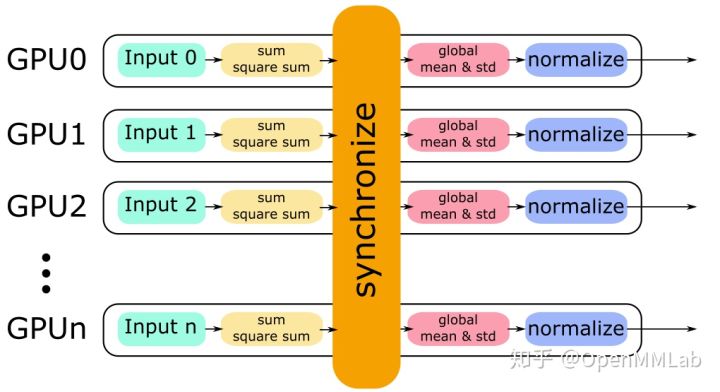
单卡上的 BN 会计算该卡对应输入的均值、方差,然后做 Normalize;SyncBN 则需要得到全局的统计量,也就是“所有卡上的输入”对应的均值、方差。一个简单的想法是分两个步骤:
- 每张卡单独计算其均值,然后做一次同步,得到全局均值
- 用全局均值去算每张卡对应的方差,然后做一次同步,得到全局方差
但两次同步会消耗更多时间,事实上一次同步就可以实现 和
的计算:
只需要在同步时算好 和
即可。这里用一张图来描述这一过程。
实现时,batchnorm.SyncBatchNorm 根据自身的超参设置、train/eval 等设置参数,并调用_functions.SyncBatchNorm,接口是def forward(self, input, weight, bias, running_mean, running_var, eps, momentum, process_group, world_size): 首先算一下单卡上的均值和方差:
# 这里直接算invstd,也就是 1/(sqrt(var+eps))
mean, invstd = torch.batch_norm_stats(input, eps)然后同步各卡的数据,得到mean_all和invstd_all,再算出全局的统计量,更新running_mean,running_var:
# 计算全局的mean和invstd
mean, invstd = torch.batch_norm_gather_stats_with_counts(input,mean_all,invstd_all,running_mean,running_var,momentum,eps,count_all.view(-1).long().tolist()
)3.2 backward
由于不同的进程共享同一组 BN 参数,因此在 backward 到 BN 前、后都需要做进程的通信,在_functions.SyncBatchNorm中实现:
# calculate local stats as well as grad_weight / grad_bias
sum_dy, sum_dy_xmu, grad_weight, grad_bias = torch.batch_norm_backward_reduce(grad_output,saved_input,mean,invstd,weight,self.needs_input_grad[0],self.needs_input_grad[1],self.needs_input_grad[2]
)算出 weight、bias 的梯度以及 ,
用于计算
的梯度:
# all_reduce 计算梯度之和
sum_dy_all_reduce = torch.distributed.all_reduce(sum_dy, torch.distributed.ReduceOp.SUM, process_group, async_op=True)
sum_dy_xmu_all_reduce = torch.distributed.all_reduce(sum_dy_xmu, torch.distributed.ReduceOp.SUM, process_group, async_op=True)
# ...
# 根据总的size,对梯度做平均
divisor = count_tensor.sum()
mean_dy = sum_dy / divisor
mean_dy_xmu = sum_dy_xmu / divisor
# backward pass for gradient calculation
grad_input = torch.batch_norm_backward_elemt(grad_output,saved_input,mean,invstd,weight,mean_dy,mean_dy_xmu
)