景点景区门票购买核销宴会活动报名公众号系统开发
功能特性
1.活动管理
可以新建一场或多场活动,管理每一场活动;与此同时,可以添加多张收费或免费门票,满足特定的需求;填写举办城市后,客户可通过定位服务,及时看到同城举办的活动;可一键生成活动邀请函,分享邀请,快速推广活动。
2.分类管理
根据不同的行业,添加分类以及设置单独的图标。
3.爆款、团购商品
可添加爆款以及团购商品,提高客流量,线上购买,线下核销。
5.评论管理、售票管理、数据分析
查看、编辑或删除活动中观众的评论;查看活动售票情况,核销门票;统计售票数,浏览数,商品购买人数,分析每场活动的曝光率、客流量以及各种数据。
- 景点景区门票购买功能列表:
- 在线浏览景点景区信息
- 选择日期和时间购买门票
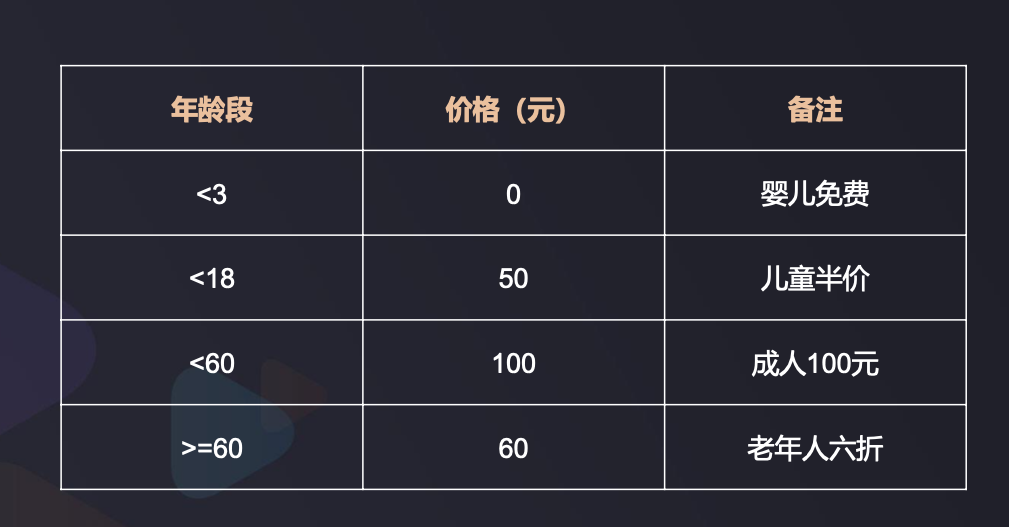
- 选择门票类型(成人、儿童、学生等)
- 添加购票数量
- 添加附加服务(如导游、接送服务等)
- 提交订单并生成订单号
- 支付订单费用
- 收到订单确认和电子门票
- 核销功能列表:
- 扫描或输入订单号进行核销
- 核销成功后更新订单状态
- 生成核销记录
- 提供核销员工工号或身份验证
- 宴会活动报名功能列表:
- 在线浏览宴会活动信息
- 选择宴会活动日期和时间
- 选择宴会套餐或菜单
- 添加宴会人数
- 填写联系人信息
- 提交报名并生成报名号
- 支付报名费用
- 收到报名确认和电子票据