IROS2018的论文
本文提出了LIMO SLAM框架,主要工作是融合了LiDAR和Monocular。
https://github.com/johannes-graeter/limo
前端
特征
本文使用的是viso2特征,它能 non-maimum suppression, outlier rejection 和 subpixel refinement.
30-40ms能提取2000个特征。
深度
正常特征
单目没有深度信息,通过LiDAR获取。
首先把LiDAR点投影到图像平面:
- 在特征点f附近选取投影过来的LiDAR点集F,不要取一条线上的激光点(右图)。
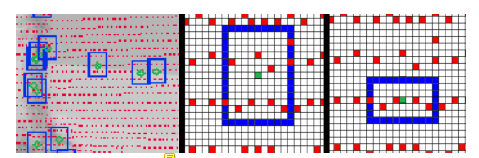
- 在3D LiDAR空间把F分割前后景(深度不同),取前景点集F_f(因为特征点一般在边缘,打过去的激光点有些在特征点所在平面上,有些其实打在背景上了。)
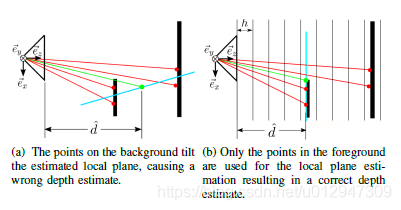
- 把F_f拟合一个平面,这个平面不能太小
- 特征点的射线跟这个平面相交,获得特侦点的深度
- 平面的法线和特征点的射线的夹角大于某个阈值,或者深度超过30米会被拒绝
地面特征点
地面上的特征点会特殊处理,因为(垂直方向)地面上雷达点更稀疏。
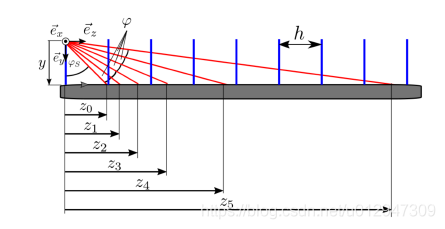
- 首先RANSAC提取出地面平面
- 跟之前一样我们围绕f逆和一个local平面,这个平面面积阈值比之前大一些
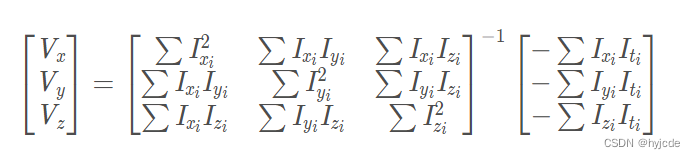
帧间运动量
除了常用的PnP估计外,
引入了Fundamental matrix的pFp约束。

另外用了Cauchy function包裹这个新引入的约束。
![]()
后端
关键帧的选择
mean optical flow 小于某个阈值的时候认为机器人没有在运动,此时不记录关键帧。
时间间隔是0.3s
路标点的选择
前端的时候所有的特征都会被计算,路标的选择在后端进行。
所有的特征点被分为远中近三组。
近处的特征对位移估计好
中间的点都好
远处的点对旋转估计好。
用了voxel filter with median filtering 来减少trees bushes对BA的影响(把局部地区富集到一起的信息离散化了?)
BA的lost function
lost function包括三部分:
投影误差和深度估计误差

以及

这个误差我没看懂,说是
优化窗口内最古老的motion包含最多的信息所以最准确。
因此我们增加了cost functor v that punishes deviations from the length of its translation vector.
P0 P1是优化窗口中最近的两个pose。
而![]()
s is a constant with the value of ![]() before optimization.
before optimization.
In that way changes in scale are regularized and the estimate is smoother and more robust outliers.
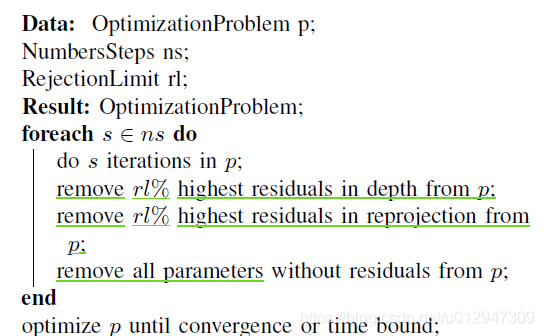
另外他们的BA会定期剔除一些误差项以跳出局部最优。
实验感想
我在改ORBSLAM2的时候尝试用这个办法找到Monocular跟LiDAR的比率
在特征点附近找LiDAR point拟合平面看起来很美好。用Kitti数据集,街边一些非墙面和地面的地区就很麻烦。
特征点附近的激光点云肉眼一看就是个非垂直非水平的倾斜平面,拟合出来的平面跟射线的相交点经常离群,距离特征点附近的激光点云很远。
很容易被30米或者平面法线射线夹角的阈值给干掉。
最后感觉没有一个平面-射线交点是可靠的。
(可能还不如像其他方法用最近LiDAR点的深度替代)