纪念一下,辛苦了一天多,终于找出来了,经过网上的资料反向推出结构。
博主需要通过机器人的实时位置来进行计算。从网上查阅得知nav_msgs/Odometry消息中存储机器人的位置和速度估计等。
下面展示一下操作流程:
1.首先通过 rostopic list 获得当前正在进行的话题,下面是我的当前活动话题

2. 然后用 rostopic info 相应话题 来获取关于话题的信息,包含订阅者、发布者、消息类型等。
关于这个Type:放在pythonry代码里面是需要从nav_msgs.msg格式的消息中导入Odometry这个模块
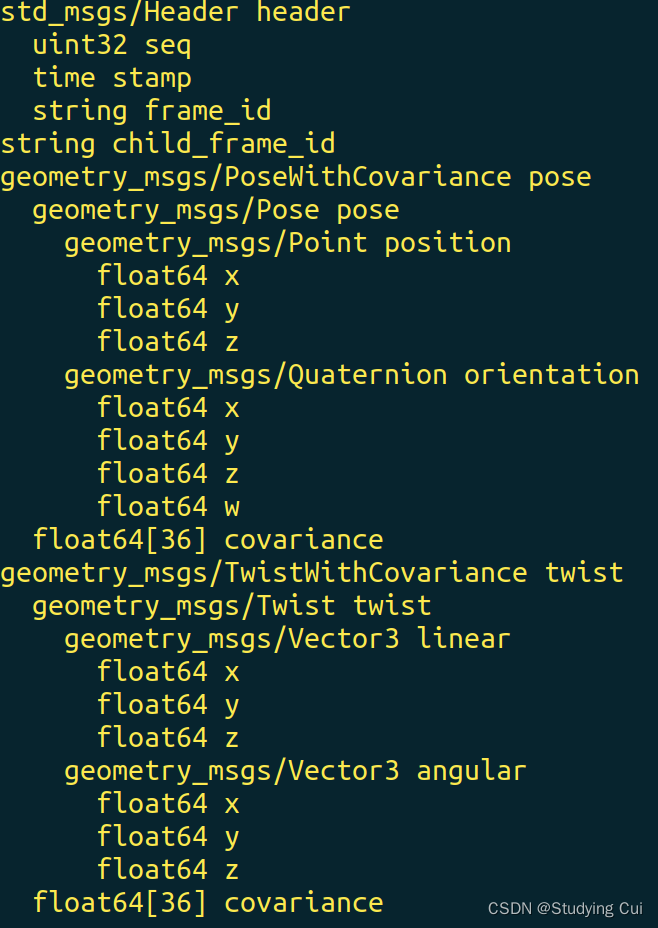
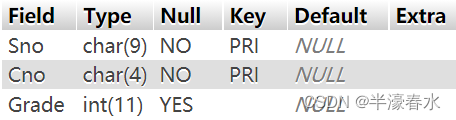
3.接着通过 rosmsg show TYPE(我的是nav_msgs/Odometry) 可以获知消息的结构类型

4.信息的数据结构类似于结构体。粗浅的说,顶格的是Odometry下的第一级,然后缩进下面的是第二级。根据我推测应该是这个意思,还望各位大神指教。
这是我的python代码打印信息结果:
附:
在py中还需导入如下模块
from nav_msgs.msg import Odometry
获取:
var=rospy.wait_for_message('/odom',Odometry,timeout=5) #(topic,topic_type,timeout)
打印:
print(var.pose.pose.position.x)
很是兴奋,希望能帮到你们,接着孤独的毕设








![面向数据编程 Data-Oriented Programming [1]](https://img-blog.csdnimg.cn/20210617163201612.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTM3MTY4NTk=,size_16,color_FFFFFF,t_70)