上篇博文讲了:FPGA中有限状态机的状态编码采用格雷码还是独热码?
那篇博文讲了状态机的状态编码是用格雷码还是独热码的问题,以及两者之间的优劣。状态机的描述方式采用的是一段式描述方式,也就是将整个状态机全部写到一个always模块中去。
这篇博文仍用上篇博文的案例,说说状态机的描述方法。一段式的描述方法、二段式以及三段式,并比较三者之间的功能仿真情况,最后真心吐露这个案例的状态转移图的疑问?不能把有问题的地方回避,我想我不要做这样的人。
首先看看状态机的描述方法,和编码方式,这两段描述借鉴:基于Verilog HDL的有限状态机,人家说的不错,我也懒着码字了。
状态机的描述方法
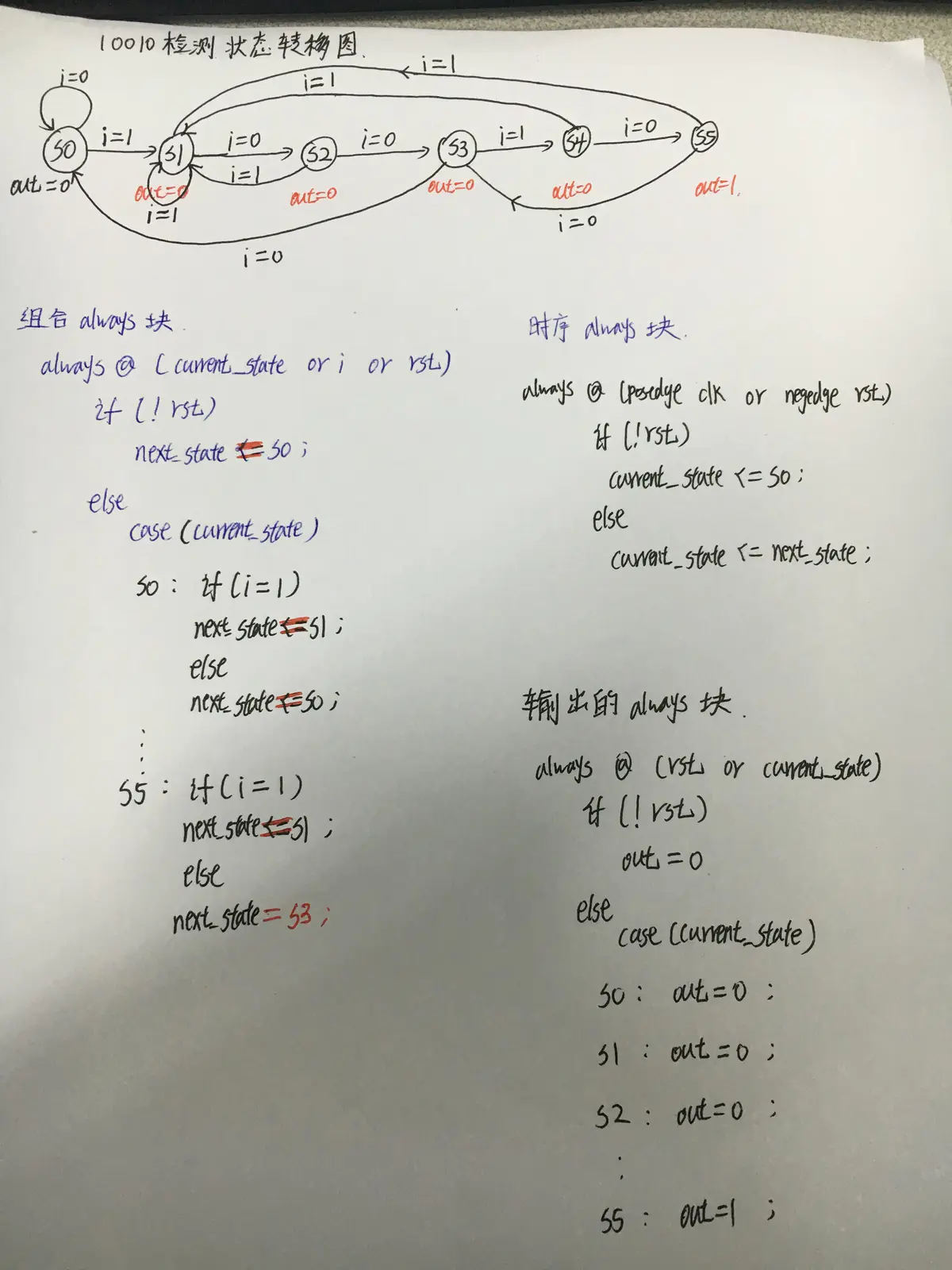
状态机的描述方法多种多样,将整个状态机写到1个always 模块里,在该模块中既描述状态转移,又描述状态的输入和输出,这种写法一般被称为一段式FSM 描述方法;
还有一种写法是使用两个always模块,其中一个always 模块采用同步时序的方式描述状态转移,而另一个模块采用组合逻辑的方式判断状态转移条件,描述状态转移规律,这种写法被称为两段式FSM 描述方法;
还有一种写法是在两段式描述方法的基础上发展而来的,这种写法使用3 个always模块,一个always 模块采用同步时序的方式描述状态转移,一个采用组合逻辑的方式判断状态转移条件,描述状态转移规律,第三个always 模块使用同步时序电路描述每个状态的输出,这种写法称为三段式写法。
状态机的状态编码
二进制码(Binary)和格雷码(Gray)属于压缩状态编码,这种编码的优点是使用的状态向量最少,但是需要较多的逻辑资源用来状态译码。二进制码从一个状态转换到相邻状态时,可能有多个比特位发生变化,易产生中间状态转移问题,状态机的速度也要比采用其它编码方式慢。格雷码两个相邻的码值仅有一位就可区分,这将会减少电路中相邻物理信号线同时变化的情况,因而可以减少电路中的电噪声。Johnson码也有同样的特点,但是要用较多的位数。
独热码(One-hot)指对任意给定的状态,状态寄存器中只有l位为1,其余位都为0。n状态的有限状态机需要n个触发器,但这种有限状态机只需对寄存器中的一位进行译码,简化了译码逻辑电路,额外触发器占用的面积可用译码电路省下来的面积抵消。当设计中加入更多的状态时,译码逻辑没有变得更加复杂,有限状态机的速度仅取决于到某特定状态的转移数量,而其它类型有限状态机在状态增加时速度会明显下降。独热码还具有设计简单、修改灵活、易于综合和调试等优点。独热码相对于二进制码,速度快但占用面积大。
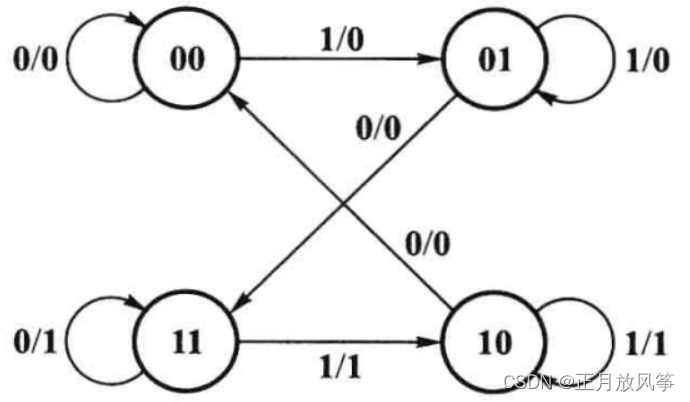
给出实际案例:
下面是一个状态转移图,我们接下来就这个状态转移图来用不同的描述方式来描述。

1)一段式描述方法:
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 21:27:04 09/02/2018
// Design Name:
// Module Name: fsm
// Project Name:
// Target Devices:
// Tool versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module fsm(input Clock,input rst_n,input A,output F,output G);
reg F, G;
reg [3:0] state;parameter Idle = 4'b1000, Start = 4'b0100, Stop = 4'b0010, Clear = 4'b0001;always @(posedge Clock) beginif(!rst_n) beginstate <= Idle;F <= 1'b0;G <= 1'b0;
end
elsecase(state)Idle: beginif(A) beginstate <= Start;G <= 1'b0;endelsestate <= Idle;endStart: beginif(!A)state <= Stop;elsestate <= Start;endStop: beginif(A) beginstate <= Clear;F <= 1'b1;endelsestate <= Stop;endClear: beginif(!A)beginstate <= Idle;F <= 1'b0;G <= 1'b1;endelsestate <= Clear;enddefault: state <= Idle;endcase end endmodule
给出测试文件,测试文件在这个案例中通用:
`timescale 1ns / 1ps// Company:
// Engineer:
//
// Create Date: 23:39:28 09/02/2018
// Design Name: fsm
// Module Name: G:/modelsim_file/fsm01/fsm_tb.v
// Project Name: fsm01
// Target Device:
// Tool versions:
// Description:
//
// Verilog Test Fixture created by ISE for module: fsm
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
// module fsm_tb;// Inputsreg Clock;reg rst_n;reg A;// Outputswire F;wire G;// Instantiate the Unit Under Test (UUT)fsm uut (.Clock(Clock), .rst_n(rst_n), .A(A), .F(F), .G(G));initial begin// Initialize Inputs rst_n = 0;A = 0;#30 A = 1;rst_n = 1;#30 A = 0;#20 A = 1;#20 A = 0;// Wait 100 ns for global reset to finish#100;endinitial beginClock = 0; forever #10 Clock = ~Clock;endendmodule功能仿真:

两段式描述方法:
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 21:27:04 09/02/2018
// Design Name:
// Module Name: fsm
// Project Name:
// Target Devices:
// Tool versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module fsm(input Clock,input rst_n,input A,output F,output G);
reg F, G;
reg [3:0] pre_state;
reg [3:0] next_state;parameter Idle = 4'b1000, Start = 4'b0100, Stop = 4'b0010, Clear = 4'b0001;//第一个过程,同步时序always块,描述状态转移方程
always @(posedge Clock) beginif(!rst_n)pre_state <= Idle;
elsepre_state <= next_state;end
//第二个过程,组合逻辑always块,描述激励方程以及输出方程
always @(pre_state or A or rst_n) begincase(pre_state)Idle:beginif(!rst_n) beginnext_state = Idle;F = 1'b0;G = 1'b0;endelse if(A) beginnext_state = Start;G = 1'b0;endelse beginnext_state = Idle;end
endStart: beginif(!rst_n) beginnext_state = Idle;F = 1'b0;G = 1'b0;endelse if(!A) beginnext_state = Stop;endelse beginnext_state = Start;end
endStop: beginif(!rst_n) beginnext_state = Idle;F = 1'b0;G = 1'b0;endelse if(A) beginnext_state = Clear;F = 1'b1;endelse beginnext_state = Stop;end
endClear: beginif(!rst_n) beginnext_state = Idle;F = 1'b0;G = 1'b0;endelse if(!A) beginnext_state = Idle;F = 0;G = 1;endelse beginnext_state = Clear;end
enddefault: beginnext_state = Idle;
endendcaseendendmodule

三段式描述:
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 21:27:04 09/02/2018
// Design Name:
// Module Name: fsm
// Project Name:
// Target Devices:
// Tool versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module fsm(input Clock,input rst_n,input A,output F,output G);
reg F, G;
reg [3:0] pre_state;
reg [3:0] next_state;parameter Idle = 4'b1000, Start = 4'b0100, Stop = 4'b0010, Clear = 4'b0001;//第一个过程,同步时序always块,描述状态转移方程
always @(posedge Clock) beginif(!rst_n)pre_state <= Idle;
elsepre_state <= next_state;end
//第二个过程,组合逻辑always块,描述激励方程
always @(pre_state or A or rst_n) begin
case(pre_state)Idle: beginif(!rst_n) next_state = Idle;else if(A) next_state = Start;else next_state = Idle;
endStart: beginif(!rst_n) next_state = Idle;else if(!A) next_state = Stop;else next_state = Start;
endStop: beginif(!rst_n) next_state = Idle;else if(A) next_state = Clear;else next_state = Stop;
endClear: beginif(!rst_n) next_state = Idle;else if(!A) next_state = Idle;else next_state = Clear;
enddefault: next_state = Idle;endcaseend
//第三个always块,描述输出方程
always @(pre_state or A or rst_n) begincase(pre_state)Idle:beginif(!rst_n) beginF = 1'b0;G = 1'b0;endelse if(A) beginG = 1'b0;endelse begin;end
endStart: beginif(!rst_n) beginF = 1'b0;G = 1'b0;endelse if(!A) begin;endelse begin;end
endStop: beginif(!rst_n) beginF = 1'b0;G = 1'b0;endelse if(A) beginF = 1'b1;endelse begin;end
endClear: beginif(!rst_n) beginF = 1'b0;G = 1'b0;endelse if(!A) beginF = 0;G = 1;endelse begin;end
enddefault: begin;
endendcaseendendmodule
功能仿真:

可见,三种描述方式的仿真图都是一样的,说明了完成同样的功能。
但是从代码的简洁度来看,就这个小状态转移图来说,无疑,一段式的描述方式是最为简单的。但是随着项目的复杂度增高,这种描述方式不便于维护和阅读。
所以呢?要综合来看,不能说哪一种一定好,哪一种一定坏,要根据实际情况而定。
最后我要提出的问题,就是Clear这个状态向Idle这个状态转移的条件:从状态图上看,注意图中的状态图的复位我用rst_n代替,这样更人性化!继续:从状态图上看,是!rst_n或!A有效时,向Idle状态转移,并且输出是F = 0 ,且 G =1;
但是从原作者的一段式代码中,我们可以看出,复位信号rst_n的优先级别要高,如果复位了,那么状态肯定转向Idle,且此时,输出F=0且G=0.这明显和状态转移图中的意思不一样啊,我们推测状态转移图写法有误,所以这里我个人默认复位信号有限,其次是输入A和当前状态决定输出。也就是说,如果复位信号无效时,当前状态为Clear且 !A有效,那么输出就是F = 0 ,且 G =1,并且状态转向Idle.