shape:(batch_size * x * y )
有batch_size个二维矩阵(x * y)相当于(z * x * y)
1. 多维数组的索引
import numpy as np
# 创建
x = np.arange(12).reshape((2,2,3))
print(x)# 得到三维数组
[[[ 0 1 2][ 3 4 5]][[ 6 7 8][ 9 10 11]]]
# 相当于 batch_size*2*3
怎么读索引?
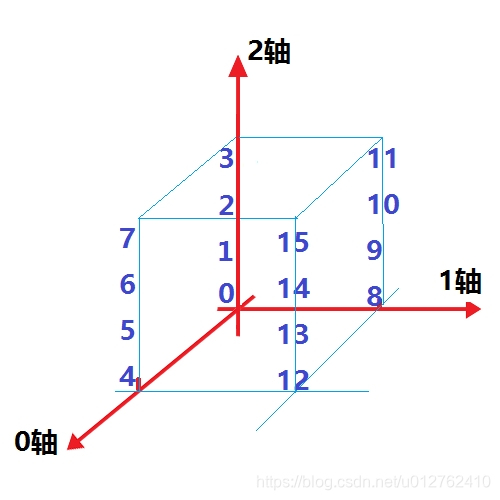
上面的三维数组相当于下图

对于第一个括号,相当于说这个三维数组有两个2维数组
对于里层的第二个括号,就是最常见的二维矩阵
对于‘7’,x,y为二维数组中的1,0(索引从0开始,横向是x轴,纵向是y轴,与shape中的x,y有所不同),z是代表‘z’在第2个二维矩阵中。所以‘7’的索引是(1,0,1)(x, y, z)
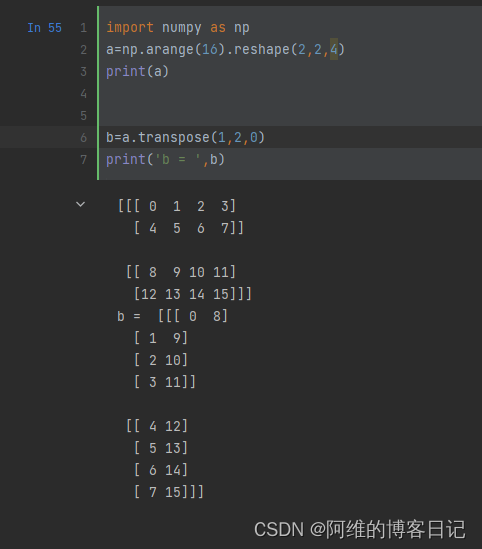
2. numpy的transpose函数
按轴交换
transpose函数中的两个参数是要互换的轴
import numpy as np
# 创建
x = np.arange(12).reshape((2,2,3))
print(x)
#输出
[[[ 0 1 2][ 3 4 5]][[ 6 7 8][ 9 10 11]]]
# transpose(z,x,y)-> (x,y,z)
y = np.transpose((x),(1,2,0))
print(y)
#输出
[[[ 0 6][ 1 7][ 2 8]][[ 3 9][ 4 10][ 5 11]]]
3. Pytorch的transpose函数
transpose只能对两个维度进行转换
import numpy as np
import torch
# 创建
x = np.arange(12).reshape((2,2,3))
x = torch.Tensor(x)
print(x)
# 输出
tensor([[[ 0., 1., 2.],[ 3., 4., 5.]],[[ 6., 7., 8.],[ 9., 10., 11.]]])
# transpose:转换第一维度和第二维度,即二维矩阵的x和y
a = x.transpose(1,2)
print(a)
#输出
tensor([[[ 0., 3.],[ 1., 4.],[ 2., 5.]],[[ 6., 9.],[ 7., 10.],[ 8., 11.]]])
# transpose:
b = x.transpose(0,2)
print(b)
# 输出
tensor([[[ 0., 6.],[ 3., 9.]],[[ 1., 7.],[ 4., 10.]],[[ 2., 8.],[ 5., 11.]]])








![[2023-01 持续更新] 谷歌学术google镜像/Sci-Hub可用网址/Github镜像可用网址总结](https://img-blog.csdnimg.cn/850c4b7f3421429ea0906481638215b3.png)