数据结构栈知识点梳理
一 栈的定义
栈(stack)是限定仅在表尾进行插入和删除操作的线性表
-
不含任何元素的栈称为空栈
-
允许插入和删除的一端成为栈顶(top),另一端称为栈底(bottom)
-
具有LIFO(Last In First Out)结构
-
栈元素具有线性关系,即前驱和后继,是特殊的线性表
二 栈的插入、删除
- 栈的插入操作—进栈(push)

- 栈的删除操作—出栈(pop)

三 栈的抽象数据类型
ADT 栈(stack)
Data同线性表。元素具有相同的类型,相邻元素具有前驱和后继关系
OperationInitStack(&S):初始化操作,建立一个空栈SDestroyStack(*S):若栈存在,则销毁它ClearStack(*S):将栈清空StackEmpty(S):若栈为空,返回true,否则返回falseGetTop(S,*e):若栈存在且非空,用e返回S的栈顶元素Push(*S,e):若栈S存在,插入新元素e到栈S中并称为栈顶元素Pop(*S,*e):删除栈S中栈顶元素,并用e返回其值StackLength(S):返回栈S的元素个数
endADT
四 栈的顺序存储结构
栈只能在一头插入和删除,下标为0的一端作栈底比较好。定义一个top变量来指示栈顶元素在数组中的位置。
存储栈的长度StackSize,栈顶位置top必须小于StackSize。
当栈有一个元素时,top=0,所以空栈的判定条件为top=-1
出栈和入栈的时间复杂度都是O(1)
- 栈的结构定义
typedef int SElemType;/*SElemType 类型根据实际情况而定,这里假设为int*/
typedef struct
{SElemType data[MAXSIZE];int top;/*栈顶指针*/
}SqStack;
- 进栈操作

进栈push操作
Status Push(SqStack *S,SElemType e)
{if(S->top == MAXSIZE - 1)/*栈满*/{return ERROR;}S->top++;/*栈顶指针+1*/S->data[S->top] = e;/*将新插入元素赋值给栈顶空间*/return OK;
}
- 出栈操作
Status Pop(SqStack *S,SElemType *e)
{if(S->top == -1)return ERROR;*e = S->data[S->top]; /*将要删除的栈顶元素赋值给e*/S->top--;return OK;
}
五 两栈共享空间
栈的顺序存储
优点:插入和删除操作不需要元素
缺点:需要提前确认存储空间,或者用编程手段扩容,空间利用率不高
解决方法:两栈共享空间,为了增加空间利用率,可以用一个数组来存储两个栈
如图:让一个栈的栈底为数组的始端(下标为0处),另一个栈为栈的末端(下标n-1处),两个栈的元素增加,向中间延伸
栈1为空,top1 == -1;栈2为空,top2 == n;栈满 top1+1 == top2

/*两栈共享空间结构*/
typedef struct
{SElemType data[MAXSIZE];int top1;int top2;
}SqDoubleStack;
- 插入操作
增加一个StackNumber判断插入栈1还是栈2
/*插入元素e为新的栈顶元素*/
Status Push(SqDoubleStack *S,SElemType e,int stackNumber)
{if(S->top1+1 == S->top2)return ERROR;if(stackNumber == 1)S->data[++S->top1]=e;else if(stackNumber == 2)S->data[--S->top2]=e;return OK;
}
- 插入操作
/*若栈不空,则删除S的栈顶元素,用e返回其值,并返回OK,否则返回ERROR*/
Status Pop(SqDoubleStack *S,SElemType *e,int stackNumber)
{if(stackNumber == 1){if(S->top1 == -1)return ERROR;*e = S->data[S->top1--];}else if(stackNumber == 2){if(S->top2 == MAXSIZE)return ERROR;*e = S->data[S->top2++];} return OK;
}
六 栈的链式存储结构
链栈不需要头结点
基本不存在栈满的情况,除非内存没有空间
链栈空top == NULL

- 链栈结构代码
typedef struct StackNode
{SElemType data;struct StackNode *next;
}StackNode,*LinkStackPtr;typedef struct LinkStack
{LinkStackPtr top;int count;
}LinkStack;
- 进栈操作

/*插入元素e为新的栈顶元素*/
Status Push(LinkStack *S,SElemType e)
{LinkStackPtr s = (LinkStackPtr)malloc(sizeof(StackNode));s->data=e;s->next=S->top; S->top=s;S->count++;return OK;
}
- 出栈操作

Status Pop(LinkStack *S,SElemType *e)
{LinkStackPtr p;if(StackEmpty(*s))return ERROR;*e=S->top->data;p=S->top;S->top = S->top->next;free(p);S->count--;return OK;
}
七 总结
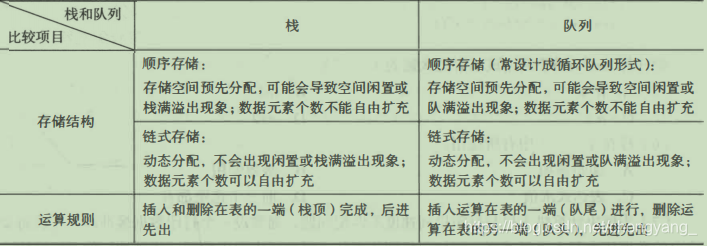
栈在使用过程中元素变化不可预料,有时很小,有时很大,那么最好用链栈。反之,大小在可控的范围内,用顺序栈。
栈更多的应用在递归。
数据结构队知识点梳理
一 定义
队列(queue)是只允许在一端进行插入操作,而在另一端进行删除操作的线性表
队列是一种先进先出(First In First Out)的线性表
允许插入的一端称队尾,允许删除的一端称队头

二 队列的抽象数据结构
ADT 队列(Queue)
Data同线性表。元素具有相同的类型,相邻元素具有前驱和后继
OperationInitQueue(*Q):初始化操作,建立一个空队列QDestroyQueue(*Q):若队列Q存在,则销毁它ClearQueue(*Q):将队列清空QueueEmpty(Q):若队列为空,返回true,否则返回falseGetHead(Q,*e):若队列Q存在且非空,用e返回队列Q的队头元素EnQueue(*Q,e):若队列存在,插入新元素e到队列Q中并成为队尾元素DeQueue(*Q,*e):删除队列Q中的队头元素,并用e返回其值QueueLength(Q):返回队列Q中的元素个数
endADT
三 循环队列
-
顺序存储结构存在不足容易发生数组越界的错误,假溢出现象。
-
两个指针
为了避免队尾和队头重合使处理十分麻烦,所以引入两个指针。front指针指向队头元素,rear指针指向队尾元素;front==rear时,指空队列
-
循环队列定义
头尾相接的顺序存储结构称为循环队列。
-
出现的问题

当front==rear的时候可能是队列为空,或可能是队列为满
解决办法:
- 设置一个标志变量flag,当front == rear,且flag = 0时队列为空,当front == rear,且flag = 1时队列为满。
- 当队列空时,条件就是front == rear,当队列为满的时候,修改其中的条件,保留一个元素空间,意思就是当队列满的时候,数组中还有一个空闲单元。
第二种解决方式不允许出现的情况

队满情况

四 循环队列一些列操作
- 顺序存储结构代码
队列满的条件:
(rear+1)%QueueSize == front
通用的计算队列长度公式:
(rear-front+QueueSize)%QueueSize
typedef int QElemType;
/*循环队列的顺序存储结构*/
typedef struct
{QElemType data[MAXSIZE];int front;int rear;
}SqQueue;
- 初始化循环队列
/*初始化一个空队列*/
Status InitQueue(SqQueue *Q)
{Q->front = 0;Q->rear = 0;return OK;
}
- 循环队列求长度
/*返回Q的元素个数,也就是当前队列的长度*/
int QueueLength(SqQueue Q)
{return (Q.rear - Q.front + MAXSIZE)%MAXSIZE;
}
- 循环队列的入队
/*若队列未满,则插入元素e为Q新的队尾元素*/
Status EnQueue(SqQueue *Q,QElemType e)
{if((Q->rear+1)%MAXSIZE == Q->front)return ERROR;Q->data[Q->rear] = e;Q->rear = (Q->rear+1)%MAXSIZE;return OK;
}
- 循环队列的出队
/*若队列不空,则删除Q中队头元素,用e返回其值*/
Status DeQueue(SqQueue *Q,QElemType *e)
{if(Q->front == Q->rear)return ERROR;*e=Q->data[Q->front];Q->front = (Q->front+1)%MAXSIZE;return OK;
}
循环队列面临着数组溢出的问题,所以还需要不用担心队列长度的链式存储结构
五 队列的链式存储结构
理解:队列的存储结构,相当于线性表的单链表,只不过它只能尾进头出,简称链队列
队头指针指向链队的头结点,队尾指针指向终端结点。

- 空队列,front和rear都指向头结点

- 链队的存储结构
typedef int QElemType
typedef struct QNode /*结点结构*/
{QElemType data;struct QNode *next;
}QNode,*QueuePtr;
typedef struct /*队列的链表结构*/
{QueuePtr front rear;
}LinkQueue;
- 入队操作

/*插入元素e为Q的新的队尾元素*/
Status EnQueue(LinkQueue *Q,QElemType e)
{QueuePtr s = (QueuePtr)malloc(sizeof(QNode));if(!s)exit(OVERFLOW);s->data = e;s->next = NULL;Q->rear->next = s;Q->rear = s;return OK;
}
- 出队操作

/*若队列不空,删除Q的队头元素,用e返回其值,并返回OK,否则返回ERROR*/
Status DeQueue(LinkQueue *Q,QElemType *e)
{QueuePtr p;if(Q->front == Q->rear)return ERROR;p = Q->front->next;if(Q->rear == p)/*若队头是队尾*/Q->rear = Q->front;free(p);return OK;
}
六 循环队列和链队的比较
时间上:都是O(1),循环队列事先申请空间,使用不释放;链队申请和释放结点需要耗时。
空间上:循环队列需要固定长度,会造成空间浪费。链队不存在这些问题,更加的灵活多变。