论文:《Single-Side Domain Generalization for Face Anti-Spoofing》
- 中国科学院计算技术研究所视觉信息处理与学习研究组(VIPL实验室)发布的单边域适应框架SSDG,其论文被CVPR2020 接收。
- Github链接:https://github.com/taylover-pei/SSDG-CVPR2020
- 论文下载:https://arxiv.org/pdf/2004.14043.pdf
动机:
目前已有的方法能在某个数据域取得很好的测试结果,但是拿到不同数据域上测试效果非常差,模型泛化能力低。分析原因:该方法并没有考虑不同域的内在分布关系,因此学到的区别特征存在偏差。
实际情景中很难收集大量的目标域数据,甚至目标域的数据信息是不可知的。
传统的域泛化(domain generalization,DG)设法利用多个已知的源域数据训练模型,而不需要目标域数据。通过对齐不同域的数据分布,学习一个具有泛化性的特征空间。这种做法是基于一种假设——未知的人脸将会映射到共享特征空间附近,因此模型可以很好的泛化到新的数据域。由于源域和目标域的真脸都是真实的人脸图像,分布差异小,因此容易学到一个紧密的特征空间;相反,假脸的攻击方法和收集方式不同,把不同域的假脸聚集在一起相对困难。因此,为假脸寻找可泛化的特征空间很难优化,而且可能会影响分类准确度。因此,尽管在源域数据集上已经学到了紧密的特征空间,但对于新的数据集仍然是无效的。
本文的主要贡献:
1)基于以上分析,假脸间的区别比真脸间的大,打算拉近所有域的真脸,同时使不同域的假脸分散。提出了单边域泛化框架(single-side domain generalization framework,SSDG)
2)设计了单边对抗学习和非对称的triplet loss来实现不同的优化目标,并且对特征和权重进行归一化,提高模型的泛化性。
3)进行了综合对比,并且在四个公开数据集上的表现取得了SOTA的结果。
单边域泛化框架(single-side domain generalization framework,SSDG),如下图所示:

具体来说: 训练一个特征生成器与域判别器,让不同域的真脸的特征不可分,形成单边对抗学习。由于不同域的假脸的差异更大,于是把不同域的假脸看作不同的类别,把所有域的真脸看作另一个类别,以此进行非对称的triplet mining,从而保证三个特性:1)不同域的假脸分散;2)所有域的真脸聚集;3)真脸和假脸之间可区分。此外,加入了特征和权重归一化,进一步提高了模型的泛化能力。
实验:
数据集有4个:OULU- NPU (O), CASIA-FASD©, Idiap Replay-Attack(I), and MSU-MFSD(M)。分别以其中一个为测试集,其余三个为训练集进行实验。

上表中的SSDG-M、SSDG-R分别代表MADDG网络和ResNet-18网络,其中ResNet-18采用全局池化层(GAP)替换了最后的平均池化层(AP);表1.实验去掉模型中不同结构之后的影响,实验结果验证了SSDG的各个结构都是对模型的最终表现都有正向作用。
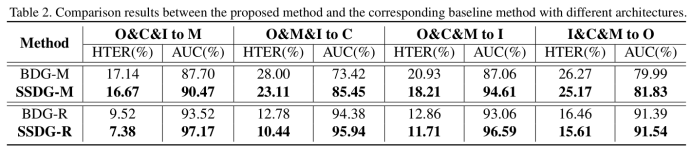
表2.比较了SSDG和其它想要为真假脸找到可泛化的特征空间的baseline,实验结果证明了为假脸找一个可泛化的特征空间是次优解,因此,为真假脸应用非对称优化目标更合理,更有助于可以泛化到未知域。
可视化:
采用Grad-CAM进行可视化。结果显示,SSDG关注的是脸的内部区域,进而寻找可区分的特征,而不是关注不同域会有差异的背景、光照等因素,从而更可能泛化到未知域。此外还发现,对于不同的攻击方式,关注的区域会有所不同,如下图:

总结:
SSDG学到了可泛化的特征空间,不同域的真脸分布是紧凑的,不同域的假脸分布是分散的。这种方法与当前同等的对待真假脸的方法有很大的不同。为了实现“单边”的目的,运用了单边对抗学习和非对称triplet loss来聚合真脸和分散假脸。论文的工作证明了真脸和假脸的分布情况是不同的,因此建议非对称的对待它们,有助于提高对未知域的泛化能力。
摘录: https://zhuanlan.zhihu.com/p/349298234