1.问题要求
画出下列图像的雷登变换正弦图,标出坐标和重要特性,假设使用平行射线束几何理论。然后重建图像,比较不同参数的选择对重建图像的影响。
2.实现步骤
(1)雷登变换
srcImage=imread('use_photos/work7_photos/headCT.tif');%读入图像theta1=0:0.5:179.5;
theta2=0:2:178;
theta3=0:10:170;
[R1,x1]=radon(srcImage,theta1);
[R2,x2]=radon(srcImage,theta2);
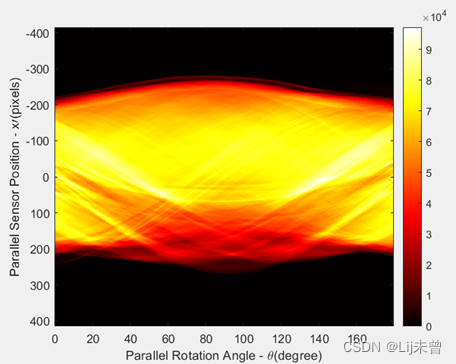
[R3,x3]=radon(srcImage,theta3);figure,imagesc(theta1,x1,R1);
xlabel('Parallel Rotation Angle - \theta(degree)');
ylabel('Parallel Sensor Position - x\prime(pixels)');
colormap(hot);
colorbar;使用radon函数,且分别设置并实现了步伐为0.5、2和10的雷登变换,以结果显示半度增量的雷登变换为例。
(2)图像重建
I1 = iradon(R1,theta1,'none');%defulat:Ram-Lak滤波器
I2 = iradon(R1,theta1,'Hamming');
I3 = iradon(R1,theta1);
I4 = iradon(R2,theta2,'none');%defulat:Ram-Lak滤波器
I5 = iradon(R2,theta2,'Hamming');
I6 = iradon(R2,theta2);
I7 = iradon(R3,theta3,'none');%defulat:Ram-Lak滤波器
I8 = iradon(R3,theta3,'Hamming');
I9 = iradon(R3,theta3);
figure;
subplot(3,3,1);imshow(I1,[]);title('theta1=0:0.5:179.5 无滤波');
subplot(3,3,2);imshow(I2,[]);title('theta1=0:0.5:179.5 Hamming滤波');
subplot(3,3,3);imshow(I3,[]);title('theta1=0:0.5:179.5 Ram-Lak滤波');
subplot(3,3,4);imshow(I4,[]);title('theta2=0:2:178 无滤波');
subplot(3,3,5);imshow(I5,[]);title('theta2=0:2:178 Hamming滤波');
subplot(3,3,6);imshow(I6,[]);title('theta2=0:2:178 Ram-Lak滤波');
subplot(3,3,7);imshow(I7,[]);title('theta3=0:10:170 无滤波');
subplot(3,3,8);imshow(I8,[]);title('theta3=0:10:170 Hamming滤波');
subplot(3,3,9);imshow(I9,[]);title('theta3=0:10:170 Ram-Lak滤波');使用iradon函数实现图像复原,滤波器有三种情况:无滤波、Hamming滤波和Ram-Lak滤波,增量也有三种情况:0.5、2和10。通过不同参数的设定,对结果进行比较,最后得出不同参数选择下,图像重建的效果。
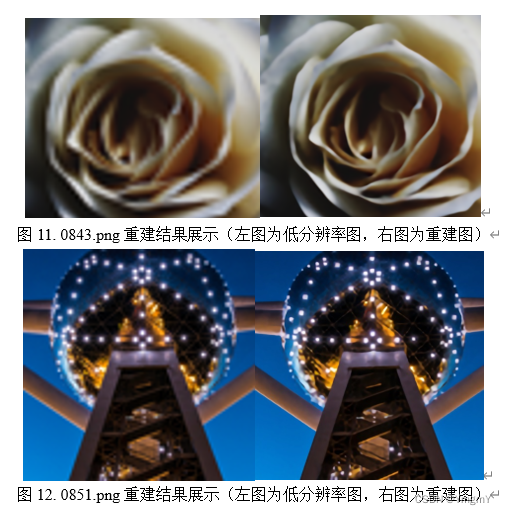
3.结果(分别为原图、雷登变换图、重建效果比较图)
由于图像较多,就不一一放出来了,以下面3张原图及其处理结果为例,展示上述代码处理后得到的结果。
图1:
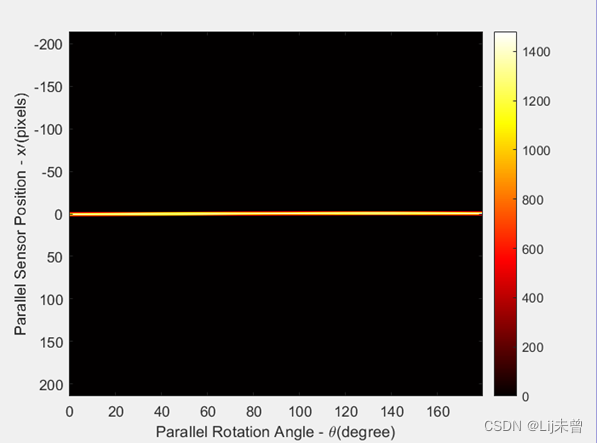
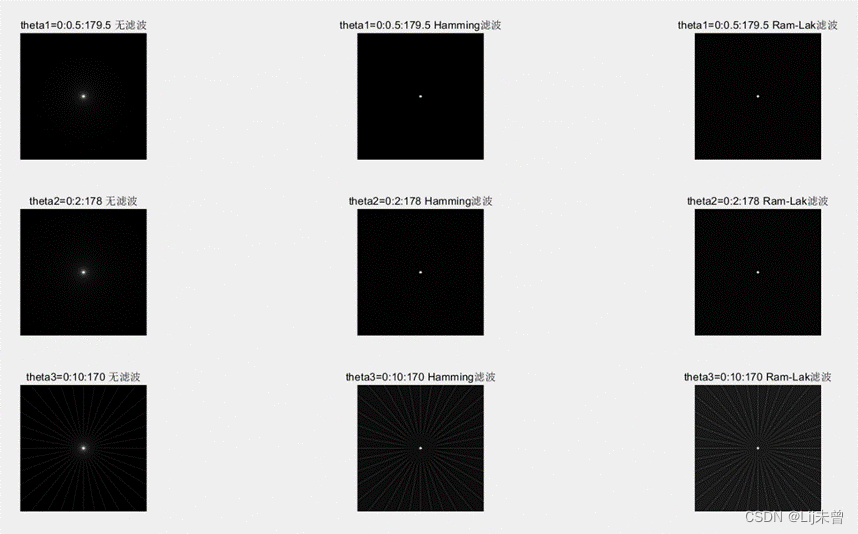
图2:

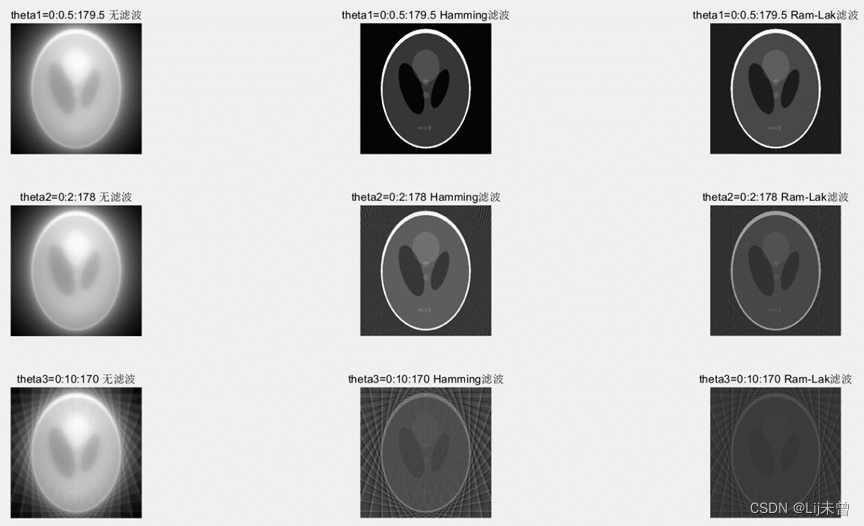
图3:

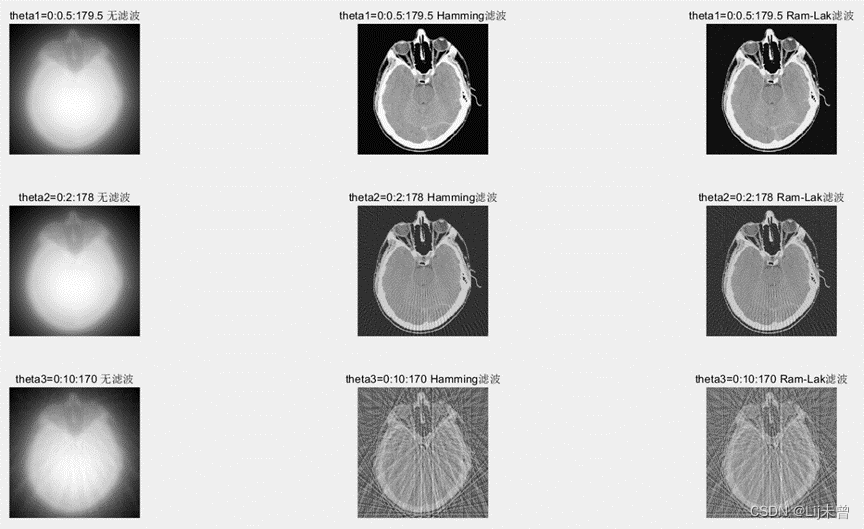
不同参数对图像重建影响的结论:
基于以上图像测试,在改变增量和滤波的情况下,得出结论如下:
1.增量为0.5,使用滤波为Hamming和Ram-Lak的图像重建效果最好;
2.无滤波情况下,重建图像容易过曝;
3.增量较大时,得到的重建图像容易产生振铃;
4.增量越小,图像重建效果越好。