- 🍨 本文为🔗365天深度学习训练营 中的学习记录博客
- 🍦 参考文章:365天深度学习训练营-第8周:猫狗识别(训练营内部成员可读)
- 🍖 原作者:K同学啊|接辅导、项目定制
我的环境:
- 语言环境:Python3.8
- 编译器:jupyter lab
- 深度学习环境:TensorFlow2.5
- 参考文章:本人博客(60条消息) 机器学习之——tensorflow+pytorch_重邮研究森的博客-CSDN博客
● 难度:夯实基础⭐⭐
● 语言:Python3、TensorFlow2
● 时间:9月12-9月16日
🍺 要求:
- 了解
model.train_on_batch()并运用(✔) - 了解tqdm,并使用tqdm实现可视化进度条(✔)
🍻 拔高(可选):
- 本文代码中存在一个严重的BUG,请找出它并配以文字说明(✔)
🔎 探索(难度有点大)
- 修改代码,处理BUG(✔)
目录
一 前期工作
1.设置GPU或者cpu
2.导入数据
3.查看数据
二 数据预处理
1.加载数据
2.可视化数据
3.再次检查数据
4.配置数据集
三 搭建网络
四 训练模型
1.设置学习率
2.模型训练
五 模型评估
1.Loss和Accuracy图
2.指定图片进行预测
3.总结
一 前期工作
环境:python3.7,1080ti,tensorflow2.5(网上租的环境😂😂)
由于电脑问题,现在在jupytr上跑了,所以代码风格发生变化。
1.设置GPU或者cpu
设置cpu(电脑gpu跑不动就用这个将就一下)
from tensorflow import keras
from tensorflow.keras import layers, models
import os, PIL, pathlib
import matplotlib.pyplot as plt
import tensorflow as tf
import numpy as np
import tensorflow as tf
import tensorflow as tf
import os,PIL
# os.environ["CUDA_DEVICE_ORDER"] = "PCI_BUS_ID"
#os.environ['CUDA_VISIBLE_DEVICES']='0'
os.environ['CUDA_VISIBLE_DEVICES']='2'
# os.environ['TF_CPP_MIN_LOG_LEVEL']='2'#屏蔽通知和警告信息
import os,PIL
os.environ['TF_XLA_FLAGS'] = '--tf_xla_enable_xla_devices'
from tensorflow import keras
keras.backend.clear_session()设置gpu
from tensorflow import keras
from tensorflow.keras import layers,models
import os, PIL, pathlib
import matplotlib.pyplot as plt
import tensorflow as tf
import numpy as npgpus = tf.config.list_physical_devices("GPU")if gpus:gpu0 = gpus[0] #如果有多个GPU,仅使用第0个GPUtf.config.experimental.set_memory_growth(gpu0, True) #设置GPU显存用量按需使用tf.config.set_visible_devices([gpu0],"GPU")gpus2.导入数据
import matplotlib.pyplot as plt
# 支持中文
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号import os,PIL,pathlib#隐藏警告
import warnings
warnings.filterwarnings('ignore')data_dir = "./365-7-data"
data_dir = pathlib.Path(data_dir)3.查看数据
image_count = len(list(data_dir.glob('*/*')))print("图片总数为:",image_count)二 数据预处理
1.加载数据
设置数据尺寸
batch_size = 8
img_height = 224
img_width = 224
设置dataset
"""
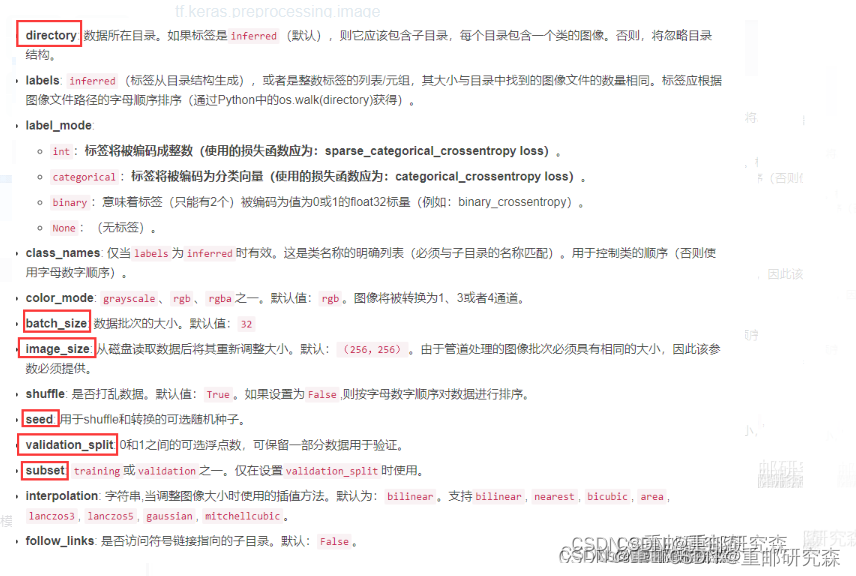
关于image_dataset_from_directory()的详细介绍可以参考文章:https://mtyjkh.blog.csdn.net/article/details/117018789
"""
train_ds = tf.keras.preprocessing.image_dataset_from_directory(data_dir,validation_split=0.2,subset="training",seed=12,image_size=(img_height, img_width),batch_size=batch_size)"""
关于image_dataset_from_directory()的详细介绍可以参考文章:https://mtyjkh.blog.csdn.net/article/details/117018789
"""
val_ds = tf.keras.preprocessing.image_dataset_from_directory(data_dir,validation_split=0.2,subset="validation",seed=12,image_size=(img_height, img_width),batch_size=batch_size)关于image_dataset_from_directory()的详细介绍可以参考文章:(7条消息) tf.keras.preprocessing.image_dataset_from_directory() 简介_K同学啊的博客-CSDN博客_tf.keras.preprocessing.image
输出经过image_dataset_from_directory()分类后的标签
class_names = train_ds.class_names
print(class_names)2.可视化数据
打印部分图片
for images, labels in train_ds.take(1):for i in range(8):ax = plt.subplot(5, 8, i + 1) plt.imshow(images[i])plt.title(class_names[labels[i]])plt.axis("off")
3.再次检查数据
输出数据的尺寸
for image_batch, labels_batch in train_ds:print(image_batch.shape)print(labels_batch.shape)break4.配置数据集
shuffle:打乱数据集
prefetch:加速处理
AUTOTUNE = tf.data.AUTOTUNEdef preprocess_image(image,label):return (image/255.0,label)# 归一化处理
train_ds = train_ds.map(preprocess_image, num_parallel_calls=AUTOTUNE)
val_ds = val_ds.map(preprocess_image, num_parallel_calls=AUTOTUNE)train_ds = train_ds.cache().shuffle(1000).prefetch(buffer_size=AUTOTUNE)
val_ds = val_ds.cache().prefetch(buffer_size=AUTOTUNE)三 搭建网络
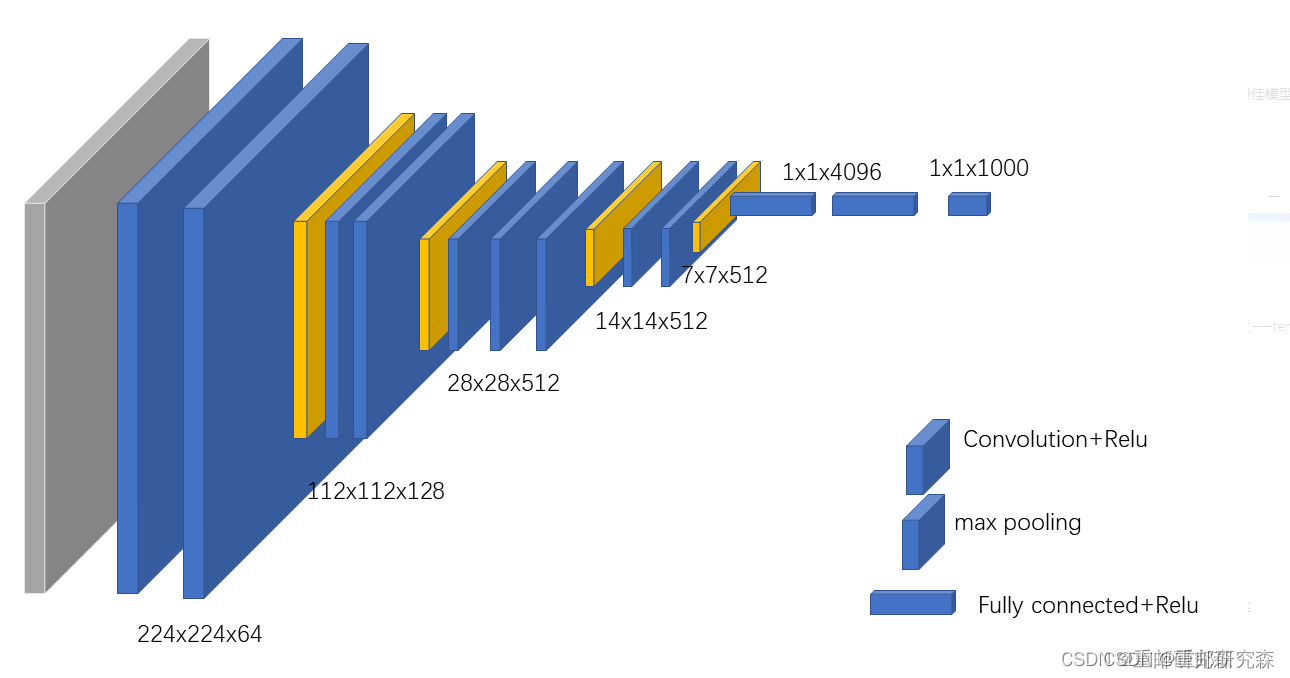
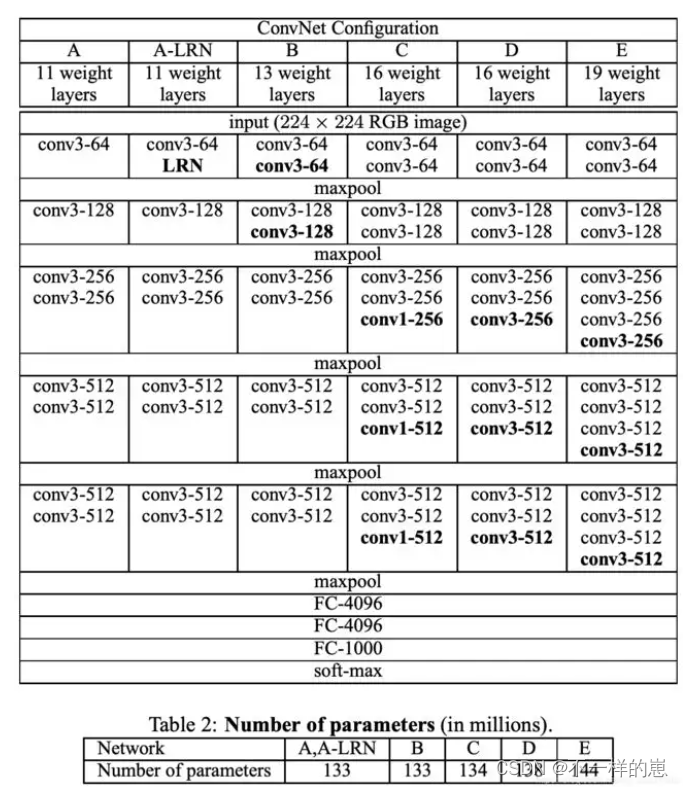
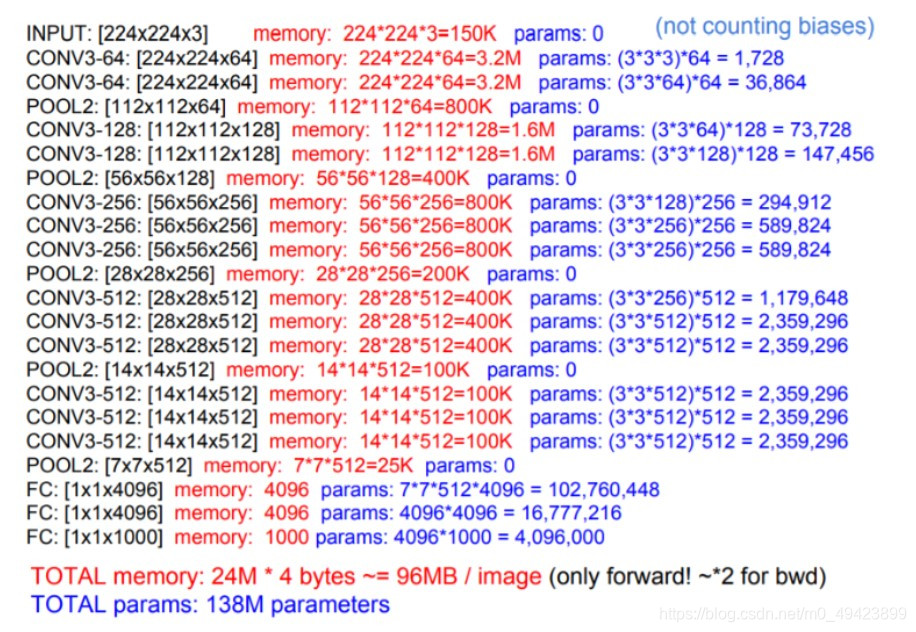
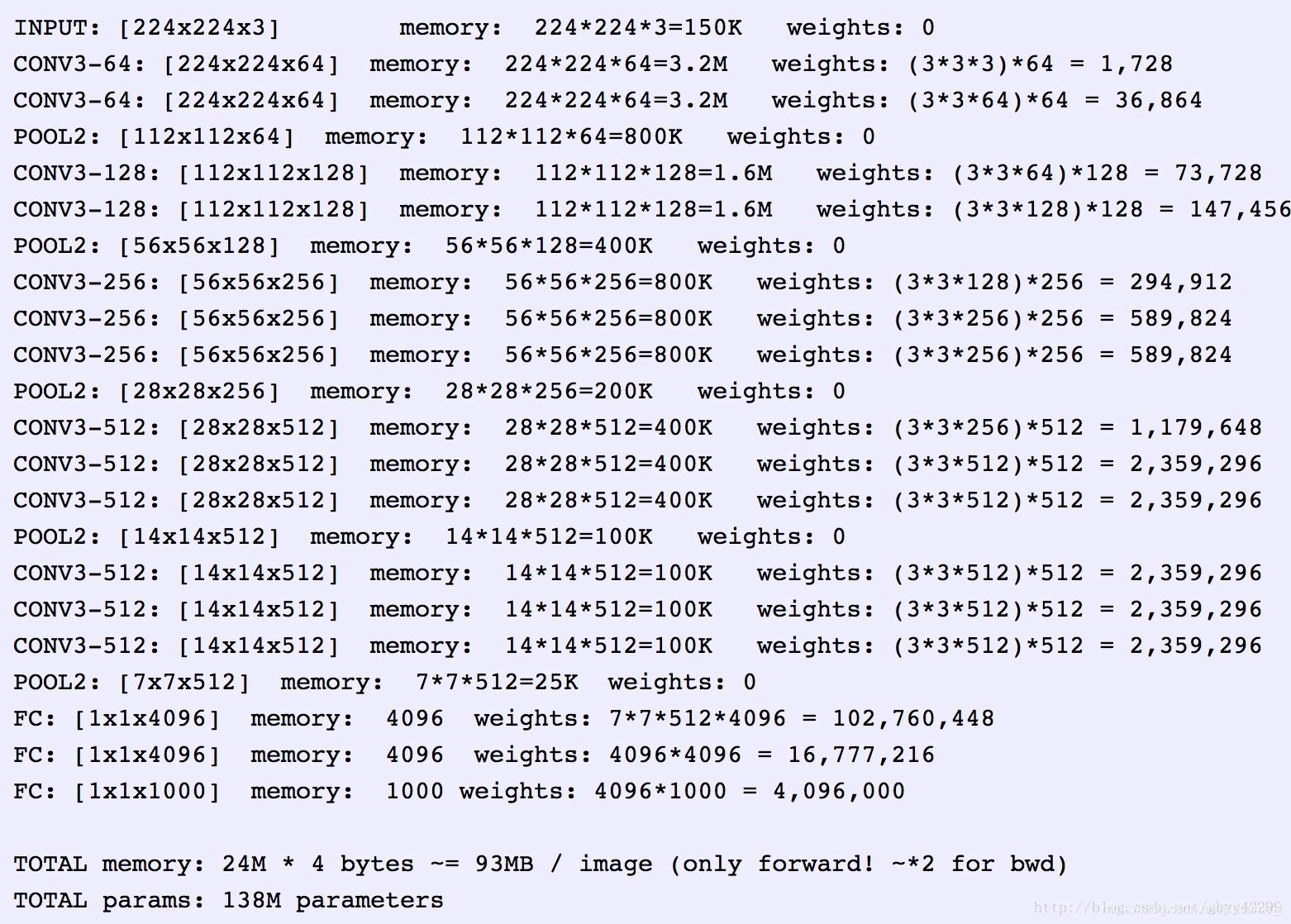
本文神经网络为官方vgg16模型,我们需要做的是对最后一层按我们的类别进行分类即可。
调用官方
model = keras.applications.VGG16(include_top=False,weights='imagenet')
global_average_layer = tf.keras.layers.GlobalAveragePooling2D()
prediction_layer1 = tf.keras.layers.Dense(1024,activation='relu')
prediction_layer2 = tf.keras.layers.Dense(512,activation='relu')
prediction_layer3 = tf.keras.layers.Dense(len(class_names),activation='softmax')model = tf.keras.Sequential([model,global_average_layer,prediction_layer1,prediction_layer2,prediction_layer3
])
model.summary()
关于VGG16函数参考下面文章
(7条消息) keras 自带VGG16 net 参数分析_vola9527的博客-CSDN博客
我们对vgg16前部分卷积层没有改变,而是不选择官方的dense层,因为我们需要根据自己的数据进行输出,官方输出为1000种分类,我们只有2种,因此按照这个写法即可。
自己搭建
model = models.Sequential([layers.experimental.preprocessing.Rescaling( 1. ,input_shape=(img_height, img_width, 3)),layers.Conv2D(filters=64, kernel_size=(3, 3), padding='same'), # 卷积层1#layers.BatchNormalization(), # BN层1layers.Activation('relu'), # 激活层1layers.Conv2D(filters=64, kernel_size=(3, 3), padding='same', ),#layers.BatchNormalization(), # BN层1layers.Activation('relu') , # 激活层1layers.MaxPool2D(pool_size=(2, 2), strides=2, padding='same'),#layers.Dropout(0.2), # dropout层#layers.Conv2D(filters=128, kernel_size=(3, 3), padding='same'),#layers.BatchNormalization(), # BN层1layers.Activation('relu'), # 激活层1layers.Conv2D(filters=128, kernel_size=(3, 3), padding='same'),#layers.BatchNormalization(), # BN层1layers.Activation('relu'), # 激活层1layers.MaxPool2D(pool_size=(2, 2), strides=2, padding='same'),#layers.Dropout(0.2), # dropout层#layers.Conv2D(filters=256, kernel_size=(3, 3), padding='same'),#layers.BatchNormalization() , # BN层1layers.Activation('relu'), # 激活层1layers.Conv2D(filters=256, kernel_size=(3, 3), padding='same'),#layers.BatchNormalization() , # BN层1layers.Activation('relu') , # 激活层1layers.Conv2D(filters=256, kernel_size=(3, 3), padding='same'),# layers.BatchNormalization(),layers.Activation('relu'),layers.MaxPool2D(pool_size=(2, 2), strides=2, padding='same'),#layers.Dropout(0.2),#layers.Conv2D(filters=512, kernel_size=(3, 3), padding='same'),# layers.BatchNormalization() , # BN层1layers.Activation('relu') , # 激活层1layers.Conv2D(filters=512, kernel_size=(3, 3), padding='same'),#layers.BatchNormalization() , # BN层1layers.Activation('relu'), # 激活层1layers.Conv2D(filters=512, kernel_size=(3, 3), padding='same'),#layers.BatchNormalization(),layers.Activation('relu'),layers.MaxPool2D(pool_size=(2, 2), strides=2, padding='same'),#layers.Dropout(0.2),#layers.Conv2D(filters=512, kernel_size=(3, 3), padding='same'),# layers.BatchNormalization() , # BN层1layers.Activation('relu'), # 激活层1layers.Conv2D(filters=512, kernel_size=(3, 3), padding='same'),#layers.BatchNormalization(), # BN层1layers.Activation('relu'), # 激活层1layers.Conv2D(filters=512, kernel_size=(3, 3), padding='same'),# layers.BatchNormalization(),layers.Activation('relu'),layers.MaxPool2D(pool_size=(2, 2), strides=2, padding='same'),#layers.Dropout(0.2),layers.Flatten(), # Flatten层,连接卷积层与全连接层layers.Dense(4096, activation='relu'), # 全连接层,特征进一步提取layers.Dense(4096, activation='relu'), # 全连接层,特征进一步提取layers.Dense(len(class_names),activation='softmax') # 输出层,输出预期结果
])
model.summary()四 训练模型
模型训练时,需要完成如下设置
损失函数(loss):衡量模型准确率
优化器(optimizer):根据损失函数进行优化更新
指标(metrics):监控训练过程,保存最优模型
1.设置学习率
model.compile(optimizer="adam",loss ='sparse_categorical_crossentropy',metrics =['accuracy'])注意损失函数不要用错了!
对于损失函数可以参考下面文章
(7条消息) tensorflow损失函数详解_重邮研究森的博客-CSDN博客
此外,需要注意在dataset设置中label_model的设置会影响loss
2.早期与保存最佳模型参数
关于ModelCheckpoint参考下面文章
(7条消息) ModelCheckpoint 讲解【TensorFlow2入门手册】_K同学啊的博客-CSDN博客_modelcheckpoint的filepath
2.模型训练
from tqdm import tqdm
import tensorflow.keras.backend as Kepochs = 10
lr = 1e-4# 记录训练数据,方便后面的分析
history_train_loss = []
history_train_accuracy = []
history_val_loss = []
history_val_accuracy = []for epoch in range(epochs):train_total = len(train_ds)val_total = len(val_ds)"""total:预期的迭代数目ncols:控制进度条宽度mininterval:进度更新最小间隔,以秒为单位(默认值:0.1)"""with tqdm(total=train_total, desc=f'Epoch {epoch + 1}/{epochs}',mininterval=1,ncols=100) as pbar:lr = lr*0.92K.set_value(model.optimizer.lr, lr)train_loss = []train_accuracy = []for image,label in train_ds: """训练模型,简单理解train_on_batch就是:它是比model.fit()更高级的一个用法想详细了解 train_on_batch 的同学,可以看看我的这篇文章:https://www.yuque.com/mingtian-fkmxf/hv4lcq/ztt4gy"""# 这里生成的是每一个batch的acc与losshistory = model.train_on_batch(image,label)train_loss.append(history[0])train_accuracy.append(history[1])pbar.set_postfix({"train_loss": "%.4f"%history[0],"train_acc":"%.4f"%history[1],"lr": K.get_value(model.optimizer.lr)})pbar.update(1)history_train_loss.append(np.mean(train_loss))history_train_accuracy.append(np.mean(train_accuracy))print('开始验证!')with tqdm(total=val_total, desc=f'Epoch {epoch + 1}/{epochs}',mininterval=0.3,ncols=100) as pbar:val_loss = []val_accuracy = []for image,label in val_ds: # 这里生成的是每一个batch的acc与losshistory = model.test_on_batch(image,label)val_loss.append(history[0])val_accuracy.append(history[1])pbar.set_postfix({"val_loss": "%.4f"%history[0],"val_acc":"%.4f"%history[1]})pbar.update(1)history_val_loss.append(np.mean(val_loss))history_val_accuracy.append(np.mean(val_accuracy))print('结束验证!')print("验证loss为:%.4f"%np.mean(val_loss))print("验证准确率为:%.4f"%np.mean(val_accuracy))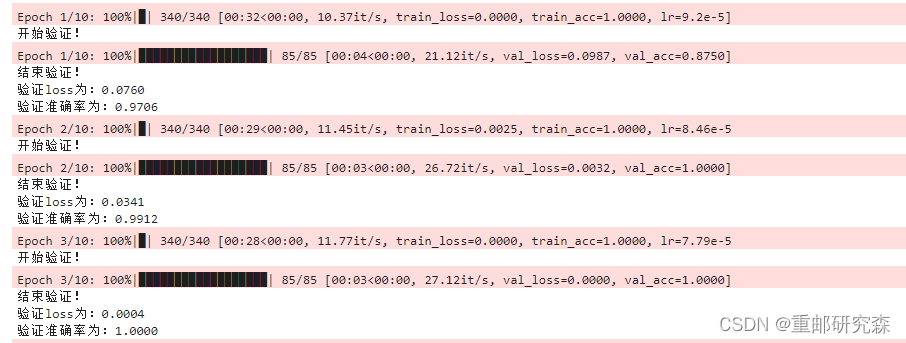
五 模型评估
1.Loss和Accuracy图

2.指定图片进行预测
import numpy as np# 采用加载的模型(new_model)来看预测结果
plt.figure(figsize=(18, 3)) # 图形的宽为18高为5
plt.suptitle("预测结果展示")for images, labels in val_ds.take(1):for i in range(8):ax = plt.subplot(1,8, i + 1) # 显示图片plt.imshow(images[i].numpy())# 需要给图片增加一个维度img_array = tf.expand_dims(images[i], 0) # 使用模型预测图片中的人物predictions = model.predict(img_array)plt.title(class_names[np.argmax(predictions)])plt.axis("off")
3.总结
1.了解了一种新的训练方式train_on_batch,我个人感觉看起来很麻烦!!!还是fit友好。
对于该方法可以参考下面这个文章。目前我个人认为还用不到这个方法。
model.train_on_batch介绍【TensorFlow2入门手册】 · 语雀 (yuque.com)
2.了解了python中的tqdm。简单来说就是对于一个循环,我们可以把它的信息通过进度条的方式打印下来。该方法可以参考下面文章
python进度条库tqdm详解 - 知乎 (zhihu.com)
3. 由于习惯之前写法,于是我又重新按照之前的模式写了。官方模型准确率:100%
4.关于错误问题:如下所示,之前会把每次的loss和val赋值给之前的值,而现在则是插入结果。