VGG 论文
《Very Deep Convolutional Networks for Large-Scale Image Recognition》
论文地址:https://arxiv.org/abs/1409.1556
使用重复元素的网络(VGG)
以学习VGG的收获、VGG16的复现二大部分,简述VGG16网络。
一. 学习VGG的收获
- VGG网络明确指出并实践证明了,浅而大的卷积核不如深而小的卷积核。
假设卷积块a、b的输入输出维度相同(不妨设维度=C),其中卷积块a(1个7 * 7的卷积层),卷积块b(由3个3 * 3的卷积层组成)。
特征方面:不论h、w是否发生改变,对于卷积块a都只能得到浅层的特征(轮廓),而卷积块b能得到深层的特征(轮廓,波纹,花边等等)。当h、w发生改变的时候,卷积块a和卷积块b都具有相同的感受野。
参数方面:卷积块a的参数Pa = 7 * 7 * C^2 = 49 * C^2,卷积块b的参数Pb = 3 * (3 * 3 * C^2) = 3 * 9 * C^2 = 27 * C^2,明显 Pa > Pb。
-
图片的尺度N(h * w)决定了VGG网络的性能,多尺度N训练有助于提升VGG网络的性能。
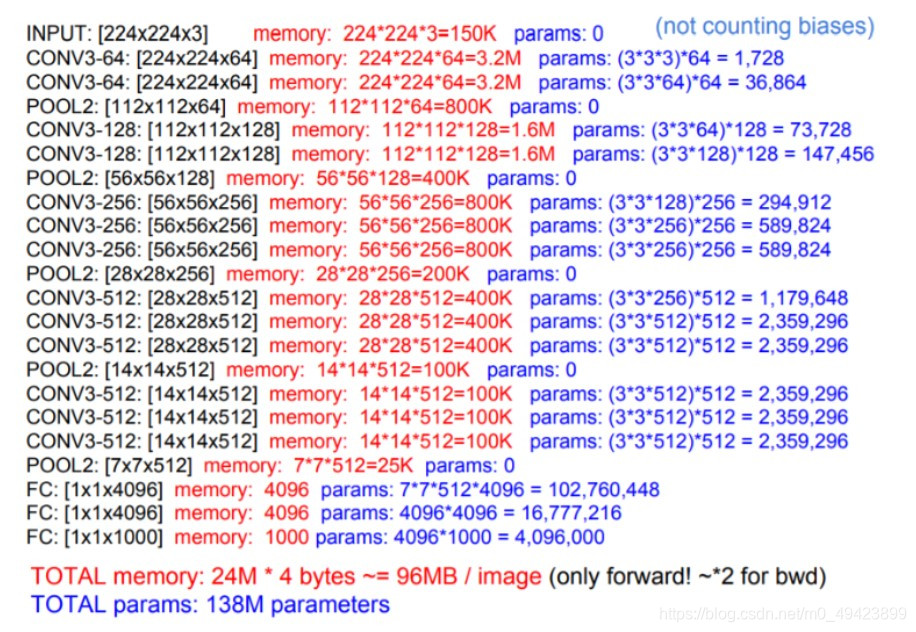
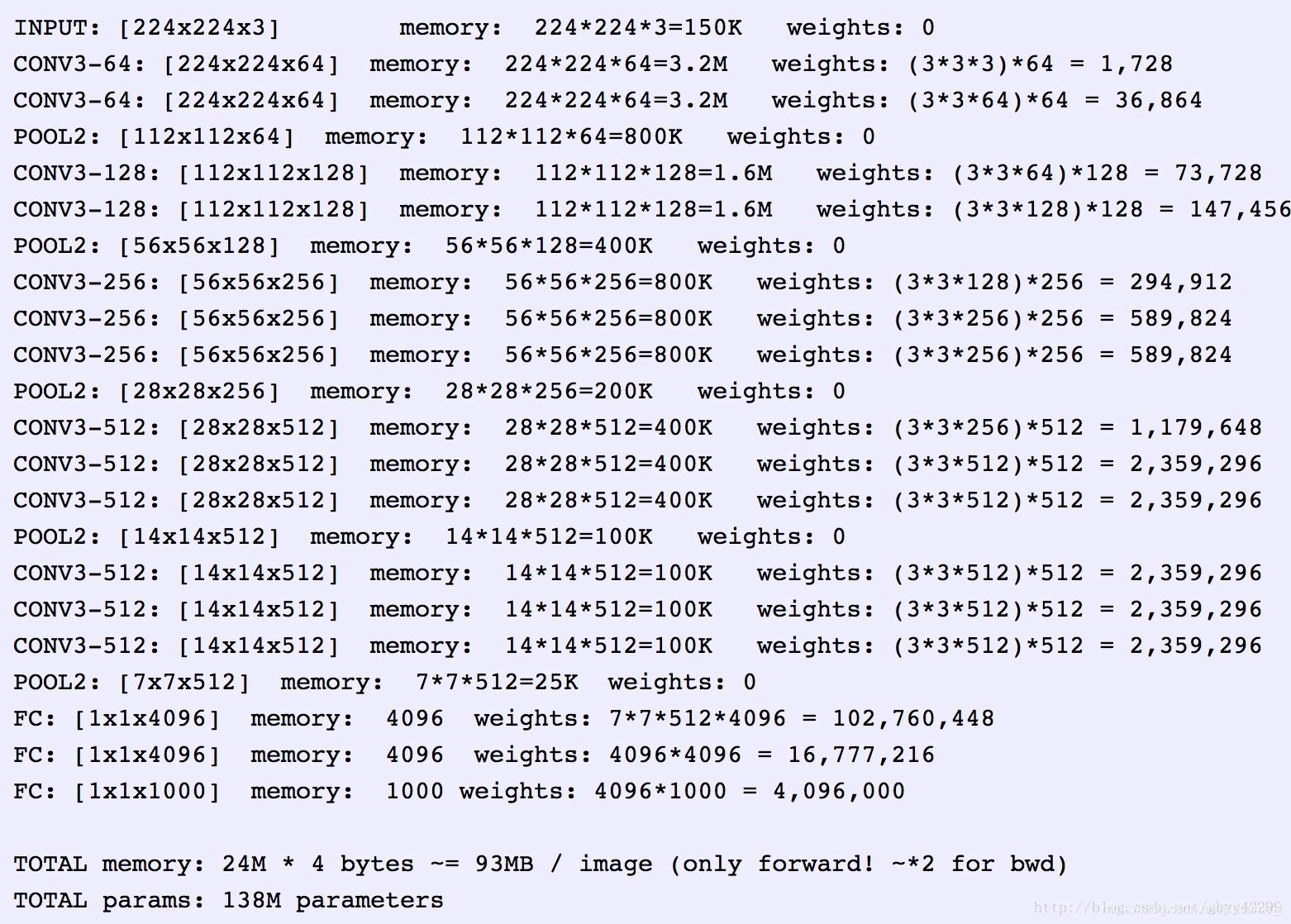
VGG网络结构图如下所示。

VGG16网络由5个卷积块和1个全连接块组成,每个卷积块后接一个步幅为2的2 * 2的最大池化层,根据图片卷积后的尺寸计算公式:
h ′ = ( h − F + 2 P ) / S + 1 h' = (h-F+2P)/S+1 h′=(h−F+2P)/S+1
w ′ = ( w − F + 2 P ) / S + 1 w' = (w-F+2P)/S+1 w′=(w−F+2P)/S+1
其中输入图片的尺度W(h, w),Filter大小(卷积层或池化层的卷积核大小) F * F,步幅 S,填充 P,输出图片的尺度N(h’, w’)。
VGG16网的输入图片的尺度必须为32的整数倍。由于组成VGG16的卷积块都是由数个步幅为1,填充为1的3 * 3的卷积层组成,不会改变图片的尺度。对于卷积块后接步幅为2的2 * 2最大池化层,图片的尺度缩小为原尺度的1/2,有5个步幅为2的2 * 2最大池化层,因此图片的尺度缩小为原尺度的(1/2)^5=1/32。
不妨设输入图片的尺度为N,采用多尺度(N-32, N, N+32)可以显著提升VGG16网络的性能。
二. VGG16网络的复现
- 数据预处理
VGG网络采用极为简单的处理方式,RGB三通道分别减去样本RGB三通道的均值。
样本数量较少时
"""
path 为文件路径的前缀
folders 为一个字典(类别kind,列表list),其中列表内存放着图片名
"""
# 样本数量较少
import cv2
import numpy as np
means = [0., 0., 0.]
stdevs = [0., 0., 0.]
img_list = []for string in folders:path_next = path + "\\" + stringfor file in folders[string]:file = path_next + "\\" + file#opencv 读入的矩阵是BGRimg = cv2.imread(file)img = img[:, :, :, np.newaxis]# print(img.shape)# img.shape = (h, w, 3, 1)img_list.append(img)imgs = np.concatenate(img_list, axis=3)
# print(imgs.shape)
# imgs.shape = (h, w, 3, n)
imgs = imgs.astype(np.float32) / (255.)for i in range(3):pixels = imgs[:, :, i, :].ravel() # 拉成一行# pixels.shape = (h*w*n, )means[i] += np.mean(pixels)stdevs[i] += np.std(pixels)# BGR --> RGB , CV读取的需要转换,PIL读取的不用转换
# 也可以这么思考,opencv读取的是BGR,PIL读取的是RGB,如果交叉使用则需要使用。
means.reverse()
stdevs.reverse()样本数量过多时
样本数量过多时,采用《概率论与数理统计》中的参数估计的方法。
对于样本x1,x2,x3,…,xn,期望u1,u2,u3,…,un,方差 v1^2, v2^2, v3^2,…, vn^2,都来源于同一个样本X采用随机取样得到。
不妨设 u1,u2,u3,…,un的均值为u,v1^2, v2^2, v3^2,…, vn^2的均值为v。
NX = x1+x2+x3+…+xn
E(NX) = u1+u2+u3+…+un = nu
D(NX) = v1^2 + v2^2 + v3^2 +…+ vn^2 = nv^2
X = NX/n = (x1+x2+x3+…+xn)/n
E(X) = E(NX)/n = u
D(X) = D(NX)/(n*n) = v^2/n
样本X的期望为u,标准差为v/sqrt(n)。
# 样本数量过多
import cv2
import random
import math
import numpy as npmeans = [0., 0., 0.]
stdevs = [0., 0., 0.]
for epoch in range(1000):img_list = []for string in folders:path_next = path + "\\" + stringfor file in folders[string]:random_num = np.random.uniform() # np.random.uniform(0,1) 0-1之间按照均匀分布采样if random_num < 0.001:file = path_next + "\\" + fileimg = cv2.imread(file)#opencv 读入的矩阵是BGRimg = img[:, :, :, np.newaxis]# print(img.shape)# img.shape = (h, w, 3, 1)img_list.append(img)imgs = np.concatenate(img_list, axis=3)#print(imgs.shape)# imgs.shape = (h, w, 3, n)imgs = imgs.astype(np.float32) / (255.)for i in range(3):pixels = imgs[:, :, i, :].ravel() # 拉成一行# print(pixels.shape)# pixels.shape = (h*w*n, )means[i] += np.mean(pixels)stdevs[i] += np.std(pixels)#if (epoch+1)%100 == 0:#print("normMean = {}".format(means))#print("normStd = {}".format(stdevs))# BGR --> RGB , CV读取的需要转换,PIL读取的不用转换
# 也可以这么思考,opencv读取的是BGR,PIL读取的是RGB,如果交叉使用则需要使用。
means.reverse()
stdevs.reverse()use_means = [0., 0., 0.]
use_stdevs = [0., 0., 0.]
for i in range(3):use_means[i] = means[i] / 1000 use_stdevs[i] = stdevs[i] / math.sqrt(1000)
print(use_means)
print(use_stdevs)
- 参数控制
batch_size = 8 # 每次喂入的数据量,batch_size可以根据电脑的配置调整
lr = 0.01 # 学习率
step_size = 1 # 每n个epoch更新一次学习率,数据集过大因此调小
epoch_num = 50 # 总迭代次数
num_print = 1120 # 每n次batch打印一次,数据集过大因此调大
num_check = 1 # 每n个epoch验证一次模型,若效果更优则保存模型,数据集过大因此调小
- 数据集构建
"""
train_path、verification_path、test_path 同为字典(类别kind,列表list),其中列表内存放着图片的绝对路径。
labels 也是一个字典(类别kind,序号number),序号为1~n的数字
"""import torch
from torch.autograd import Variable
from torchvision import transforms
from torch.utils.data import Dataset, DataLoader
import cv2# 独立设置尺寸,有利于VGG网络的多尺度训练
size = 224# 均值和标准差均是按照VGG论文设置的,减去样本均值,标准差设置为1。
transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.5142455680072308, 0.4990353952050209, 0.5186490820050239), (1.0, 1.0, 1.0))])# -----------------ready the dataset--------------------------
def default_loader(path, img_size):img = cv2.imread(path)if img_size is not None:img = cv2.resize(img,(img_size,img_size),interpolation=cv2.INTER_NEAREST)return imgclass MyDataset(Dataset):# 构造函数def __init__(self, path, transform=None, target_transform=None, loader=default_loader, img_size = None):imgs = []for classification in path:for i in range(len(path[classification])):img_path = path[classification][i]img_label = labels[classification]imgs.append((img_path,int(img_label)))#imgs中包含有图像路径和标签self.path = pathself.imgs = imgsself.transform = transformself.target_transform = target_transformself.loader = loaderself.img_size = img_size# hash_map建立def __getitem__(self, index):img_path, img_label = self.imgs[index]# 调用 opencv 打开图片img = self.loader(img_path,self.img_size)if self.transform is not None:img = self.transform(img)img_label -= 1return img, img_labeldef __len__(self):return len(self.imgs)train_data = MyDataset(train_path, transform=transform, img_size=size)
verification_data = MyDataset(verification_path, transform=transform, img_size=size)
test_data = MyDataset(test_path, transform=transform, img_size=size)#train_data 、verification_data和test_data包含多有的训练、验证与测试数据,调用DataLoader批量加载
train_loader = DataLoader(dataset=train_data, batch_size=batch_size, shuffle=True)
verification_loader = DataLoader(dataset=verification_data, batch_size=batch_size, shuffle=False)
test_loader = DataLoader(dataset=test_data, batch_size=batch_size, shuffle=False)
- VGG16网络构建
import torch
from torch import optim
import torchvision
import matplotlib.pyplot as plt
import numpy as np
from torchvision.utils import make_grid
import time
关于多尺度训练的问题,有两个思路。
思路1:采用模型加载函数model.load_state_dict(torch.load(PATH), strict=False)。在加载部分模型参数进行预训练的时候,很可能会碰到键不匹配的情况(模型权重都是按键值对的形式保存并加载回来的)。因此,无论是缺少键还是多出键的情况,都可以通过在load_state_dict()函数中设定strict参数为False来忽略不匹配的键。(不推荐)
思路2:参照《动手学深度学习》的卷积神经网络NiN、GoogLeNet、ResNet、DenseNet等网络,对VGG16网络的全连接块进行魔改,采用卷积块temp代替全连接块的思路。卷积块temp由2个1 * 1的卷积层及1个全局平均池化层组成,最后接2(其中1层为塑造类别的全连接层)个全连接层。
思路1代码实现
from torch import nn
from torchsummary import summaryclass VGG16Net(nn.Module):def __init__(self):super(VGG16Net,self).__init__()# 第一层,2个卷积层和1个最大池化层self.layer1 = nn.Sequential(# 输入3通道,卷积核3*3,输出64通道(如224*224*3的样本图片,(224+2*1-3)/1+1=224,输出224*224*64)nn.Conv2d(3,64,3,padding=1),nn.BatchNorm2d(64),nn.ReLU(inplace=True),# 输入64通道,卷积核3*3,输出64通道(输入224*224*64,卷积3*3*64*64,输出224*224*64)nn.Conv2d(64,64,3,padding=1),nn.BatchNorm2d(64),nn.ReLU(inplace=True),# 输入224*224*64,输出112*112*64nn.MaxPool2d(kernel_size=2,stride=2))# 第二层,2个卷积层和1个最大池化层self.layer2 = nn.Sequential(# 输入64通道,卷积核3*3,输出128通道nn.Conv2d(64,128,3,padding=1),nn.BatchNorm2d(128),nn.ReLU(inplace=True),# 输入128通道,卷积核3*3,输出128通道nn.Conv2d(128,128,3,padding=1),nn.BatchNorm2d(128),nn.ReLU(inplace=True),# 输入112*112*128,输出56*56*128nn.MaxPool2d(kernel_size=2,stride=2))# 第三层,3个卷积层和1个最大池化层self.layer3 = nn.Sequential(# 输入128通道,卷积核3*3,输出256通道nn.Conv2d(128,256,3,padding=1),nn.BatchNorm2d(256),nn.ReLU(inplace=True),# 输入256通道,卷积核3*3,输出256通道nn.Conv2d(256,256,3,padding=1),nn.BatchNorm2d(256),nn.ReLU(inplace=True),# 输入256通道,卷积核3*3,输出256通道nn.Conv2d(256,256,3,padding=1),nn.BatchNorm2d(256),nn.ReLU(inplace=True),#输入56*56*256,输出28*28*256nn.MaxPool2d(kernel_size=2,stride=2))# 第四层,3个卷积层和1个最大池化层self.layer4 = nn.Sequential(# 输入256通道,卷积核3*3,输出512通道nn.Conv2d(256,512,3,padding=1),nn.BatchNorm2d(512),nn.ReLU(inplace=True),# 输入512通道,卷积核3*3,输出512通道nn.Conv2d(512,512,3,padding=1),nn.BatchNorm2d(512),nn.ReLU(inplace=True),# 输入512通道,卷积核3*3,输出512通道nn.Conv2d(512,512,3,padding=1),nn.BatchNorm2d(512),nn.ReLU(inplace=True),#输入28*28*512,输出14*14*256nn.MaxPool2d(kernel_size=2,stride=2))# 第五层,3个卷积层和1个最大池化层self.layer5 = nn.Sequential(# 输入512通道,卷积核3*3,输出512通道nn.Conv2d(512,512,3,padding=1),nn.BatchNorm2d(512),nn.ReLU(inplace=True),# 输入512通道,卷积核3*3,输出512通道nn.Conv2d(512,512,3,padding=1),nn.BatchNorm2d(512),nn.ReLU(inplace=True),# 输入512通道,卷积核3*3,输出512通道nn.Conv2d(512,512,3,padding=1),nn.BatchNorm2d(512),nn.ReLU(inplace=True),#输入14*14*512,输出7*7*256nn.MaxPool2d(kernel_size=2,stride=2))# VGG16--13个卷积层self.conv_layer = nn.Sequential(self.layer1,self.layer2,self.layer3,self.layer4,self.layer5)# VGG16--3个全连接层self.fc = nn.Sequential("""多尺度训练,代表训练3次分别把第一个全连接层,设置成如下A、nn.Linear(512 * 6 * 6, 4096)B、nn.Linear(512 * 8 * 8, 4096)C、nn.Linear(512 * 7 * 7, 4096)保证C为最后一次训练即可。"""nn.Linear(512 * 7 * 7, 4096),nn.ReLU(inplace=True),nn.Dropout(0.5),# 随机丢弃50%的神经元nn.Linear(4096, 4096),nn.ReLU(inplace=True),nn.Dropout(0.5),# 随机丢弃50%的神经元"""第一种方法nn.Linear(4096, n)shape = (-1, n),n表示类别的数量第二种方法如下,在VGG16后接1个全连接层"""nn.Linear(4096, 1000),# 后接1个全连接层,shape = (-1, n),n表示类别的数量nn.Linear(1000, 29))def forward(self,x):x = self.conv_layer(x)x = x.view(x.size(0), -1)x = self.fc(x)return x
if __name__ == "__main__": device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')vgg_model=VGG16Net().to(device)summary(vgg_model, (3,224,224)) #打印网络结构
思路2代码实现
from torch import nn
from torchsummary import summaryclass VGG16Net(nn.Module):def __init__(self):super(VGG16Net,self).__init__()# 第一层,2个卷积层和1个最大池化层self.layer1 = nn.Sequential(# 输入3通道,卷积核3*3,输出64通道(如224*224*3的样本图片,(224+2*1-3)/1+1=224,输出224*224*64)nn.Conv2d(3,64,3,padding=1),nn.BatchNorm2d(64),nn.ReLU(inplace=True),# 输入64通道,卷积核3*3,输出64通道(输入224*224*64,卷积3*3*64*64,输出224*224*64)nn.Conv2d(64,64,3,padding=1),nn.BatchNorm2d(64),nn.ReLU(inplace=True),# 输入224*224*64,输出112*112*64nn.MaxPool2d(kernel_size=2,stride=2))# 第二层,2个卷积层和1个最大池化层self.layer2 = nn.Sequential(# 输入64通道,卷积核3*3,输出128通道nn.Conv2d(64,128,3,padding=1),nn.BatchNorm2d(128),nn.ReLU(inplace=True),# 输入128通道,卷积核3*3,输出128通道nn.Conv2d(128,128,3,padding=1),nn.BatchNorm2d(128),nn.ReLU(inplace=True),# 输入112*112*128,输出56*56*128nn.MaxPool2d(kernel_size=2,stride=2))# 第三层,3个卷积层和1个最大池化层self.layer3 = nn.Sequential(# 输入128通道,卷积核3*3,输出256通道nn.Conv2d(128,256,3,padding=1),nn.BatchNorm2d(256),nn.ReLU(inplace=True),# 输入256通道,卷积核3*3,输出256通道nn.Conv2d(256,256,3,padding=1),nn.BatchNorm2d(256),nn.ReLU(inplace=True),# 输入256通道,卷积核3*3,输出256通道nn.Conv2d(256,256,3,padding=1),nn.BatchNorm2d(256),nn.ReLU(inplace=True),#输入56*56*256,输出28*28*256nn.MaxPool2d(kernel_size=2,stride=2))# 第四层,3个卷积层和1个最大池化层self.layer4 = nn.Sequential(# 输入256通道,卷积核3*3,输出512通道nn.Conv2d(256,512,3,padding=1),nn.BatchNorm2d(512),nn.ReLU(inplace=True),# 输入512通道,卷积核3*3,输出512通道nn.Conv2d(512,512,3,padding=1),nn.BatchNorm2d(512),nn.ReLU(inplace=True),# 输入512通道,卷积核3*3,输出512通道nn.Conv2d(512,512,3,padding=1),nn.BatchNorm2d(512),nn.ReLU(inplace=True),#输入28*28*512,输出14*14*256nn.MaxPool2d(kernel_size=2,stride=2))# 第五层,3个卷积层和1个最大池化层self.layer5 = nn.Sequential(# 输入512通道,卷积核3*3,输出512通道nn.Conv2d(512,512,3,padding=1),nn.BatchNorm2d(512),nn.ReLU(inplace=True),# 输入512通道,卷积核3*3,输出512通道nn.Conv2d(512,512,3,padding=1),nn.BatchNorm2d(512),nn.ReLU(inplace=True),# 输入512通道,卷积核3*3,输出512通道nn.Conv2d(512,512,3,padding=1),nn.BatchNorm2d(512),nn.ReLU(inplace=True),#输入14*14*512,输出7*7*256nn.MaxPool2d(kernel_size=2,stride=2))# 魔改VGG16--第六层self.layer6 = nn.Sequential(nn.Conv2d(512, 4096,1),nn.BatchNorm2d(4096),nn.ReLU(inplace=True),nn.Conv2d(4096, 4096,1),nn.BatchNorm2d(4096),nn.ReLU(inplace=True))# VGG16--15个卷积层self.conv_layer = nn.Sequential(self.layer1,self.layer2,self.layer3,self.layer4,self.layer5,self.layer6)# VGG16--1个全连接层self.fc = nn.Sequential(nn.Linear(4096, 1000),nn.ReLU(inplace=True),nn.Dropout(0.5),# 随机丢弃50%的神经元nn.Linear(1000, 29))def forward(self,x):x = self.conv_layer(x)# 全局平均池化层x = nn.functional.adaptive_avg_pool2d(x, (1, 1))x = x.view(x.size(0), -1)x = self.fc(x)return x
if __name__ == "__main__": device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')vgg_model=VGG16Net().to(device)summary(vgg_model, (3,224,224)) #打印网络结构
- 模型训练
# VGG16
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
model = VGG16Net().to(device)
# 调参
# 交叉熵
criterion = nn.CrossEntropyLoss()
# 迭代器
optimizer = optim.SGD(model.parameters(), lr=lr, momentum=0.8, weight_decay=0.001)
# 更新学习率
schedule = optim.lr_scheduler.StepLR(optimizer, step_size=step_size, gamma=0.5, last_epoch=-1)
# 训练# 损失图
loss_list = []
start = time.time()
correct_optimal = 0.0for epoch in range(epoch_num):model.train()running_loss = 0.0for i, (inputs, labels) in enumerate(train_loader, 0):# 从train_loader中取出64个数据inputs, labels = inputs.to(device), labels.to(device)# 梯度清零optimizer.zero_grad()# 模型训练outputs = model(inputs)#print(outputs.shape)# 反向传播loss = criterion(outputs,labels).to(device)loss.backward()optimizer.step()running_loss += loss.item()if (i+1) % num_print == 0:print('[%d epoch, %d] loss:%.6f' %(epoch+1, i+1, running_loss/num_print))loss_list.append(running_loss/num_print)running_loss = 0.0# 打印学习率及确认学习率是否进行更新lr_1 = optimizer.param_groups[0]['lr']print("learn_rate: %.15f"%lr_1)schedule.step()# 验证模式if (epoch+1) % num_check == 0:# 不需要梯度更新model.eval()correct = 0.0total = 0with torch.no_grad():print("=======================check=======================")for inputs, labels in verification_loader:# 从train_loader中取出batch_size个数据inputs, labels = inputs.to(device), labels.to(device)# 模型验证outputs = model(inputs)pred = outputs.argmax(dim=1) #返回每一行中最大值的索引total = total + inputs.size(0)correct = correct + torch.eq(pred, labels).sum().item()correct = 100 * correct/totalprint("Accuracy of the network on the 19850 verification images:%.2f %%" %correct )print("===================================================")# 模型保存if correct > correct_optimal:PATH = "VVG\\VGG16 model_" + str(epoch) + "_" + str(correct) + ".pth"torch.save(model.state_dict(), 'VGG/VGG16_%03d-correct%.3f.pth' % (epoch + 1, correct))correct_optimal = correctend=time.time()
print("time:{}".format(end-start))
- 绘制损失图
import matplotlib.pyplot as pltx = [ i+1 for i in range(len(loss_list)) ]# plot函数作图
plt.plot(x, loss_list) # show函数展示出这个图,如果没有这行代码,则程序完成绘图,但看不到
plt.show()
损失图如下,其中5个单位代表1次epoch。

7. 模型检验
# 检验模式,不需要梯度更新
model.eval()
correct = 0.0
total = 0
with torch.no_grad():print("=======================check=======================")for inputs, labels in test_loader:# 从train_loader中取出batch_size个数据inputs, labels = inputs.to(device), labels.to(device)# 模型检验outputs = model(inputs)pred = outputs.argmax(dim=1) #返回每一行中最大值的索引total = total + inputs.size(0)correct = correct + torch.eq(pred, labels).sum().item()correct = 100 * correct/totalprint("Accuracy of the network on the 25907 test images:%.2f %%" %correct )print("===================================================")
最后祝各位永远怀着一颗怀疑的心,时刻仰望理论,不止于纸上谈兵,把想法付诸于实践,并不断思考。