1、滑动窗口的概念
TCP每发送一个数据,都需要进行一次应答。当收到了上一个应答,在发下一个数据,但这种方式效率比较低。数据包往返时间越长,通信的效率就越低。
为了解决这个问题,TCP引入了窗口概念。即在接收窗口范围内的数据,无需等待确认,可以继续发送窗口内数据,直到把发送窗口数据传输完毕。
窗口的实现实际上是在操作系统开辟一个缓存空间(空间和序号都是有限的,并且要循环使用,一般为环形队列),发送主机在等到确认应答返回之前,必须在缓冲区保留已发送窗口的数据(超时重传)。收到应答后,将此数据清除。
2、滑动窗口的使用
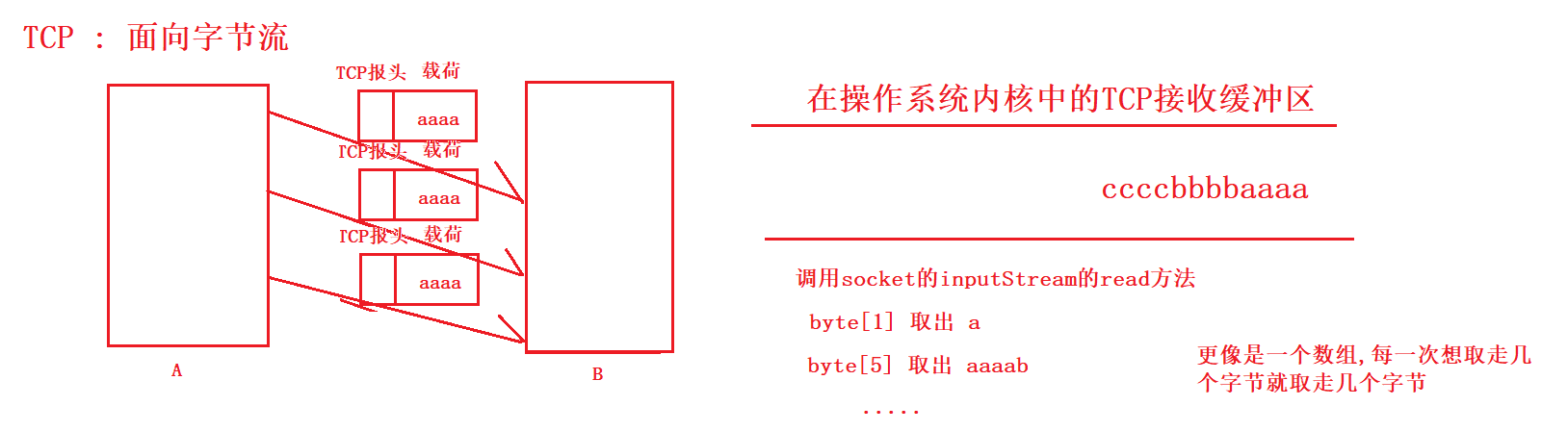
TCP的滑动窗口是以字节为单位的。
TCP通信是全双工通信,通信中的每一方都在发送和接收报文段。每一方都有自己的发送窗口和接收窗口。
假设数据是由A发往B的,即A发送数据,B给出确认。
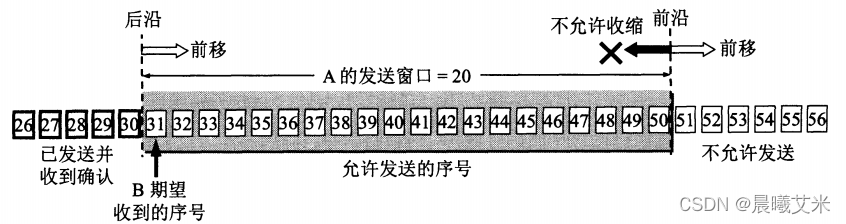
如图所示,表示B发来的确认报文段。其中窗口是20字节,确认号是31(表明B期望收到的下一个序号是31,表示31之前的数据已收到)。根据这两个数据,A根据B的窗口值构造出自己的发送窗口为20字节(A的发送窗口一定不能超过B的接收窗口数值,上篇文章讲到过的)。
其中A主机在没得到B的确认的情况下,A可以连续把窗口内的数据都发送出去。凡是已发送过的数据,在未收到确认之前都必须暂时保留在缓存空间内,以便在超时重传使用。
上图窗口后沿之后的数据表示已发送且收到了确认。这部分数据不需要在保留。发送窗口前沿之前的部分数据表示不允许发送的,接收方没有更多缓存接收这些数据。
3、滑动窗口的位置
发送和接收窗口的位置在实时动态变化着。
在程序设计上描述一个窗口状态需要三个指针。
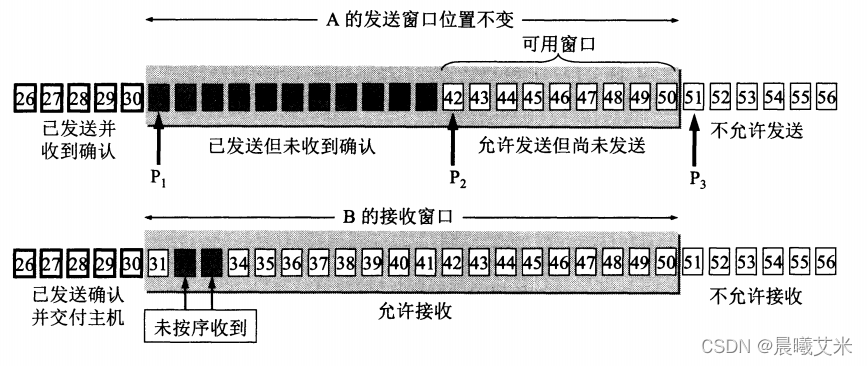
如上图A的发送窗口
P3 - P1 = A的发送窗口
P2 - P1 = 已发送但尚未收到确认的字节数
P3 - P2 = 允许发送但当前尚未发送的字节数(又称可用窗口或有效窗口)
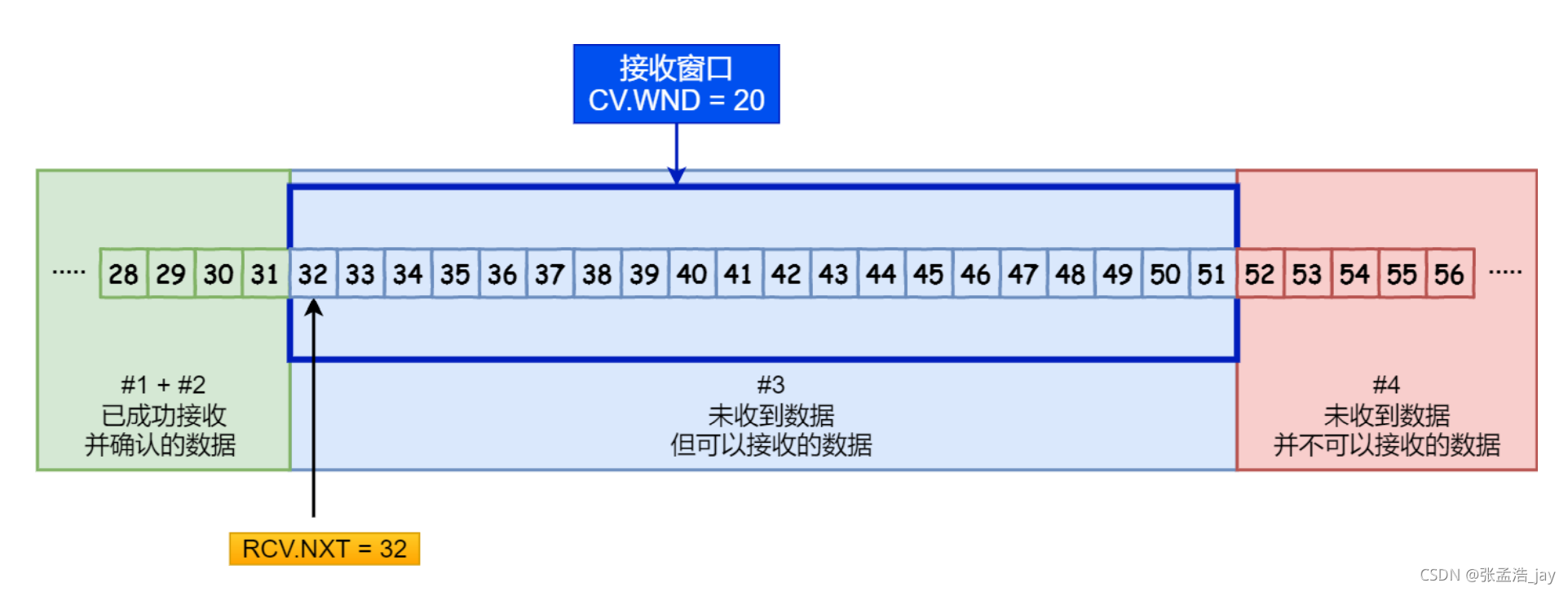
B的接收窗口。窗口大小是20。窗口之外,到30为止的数据时已经发过确认,并且已经交付主机了。因此B可以不在保留这些数据。接收窗口内的数据序号(31~50)是允许接收的。
对于不按序到达的数据,TCP标准并无明确规定。如果接收方把不按序到达的数据一律丢弃,那么接收窗口管理将会比较简单,但是对网络资源的利用不利。因此TCP通常对不按序到达的数据时先临时存放在接收窗口中,等到字节流中所缺少的字节收到后,在按序交付上层的应用进程。
如上图,B先收到了序号为32和33的数据(31未收到,也许丢失或滞留在网络中),此时B会给出确认报文,报文段中确认号仍为31(31未收到,期望收到的序号)。
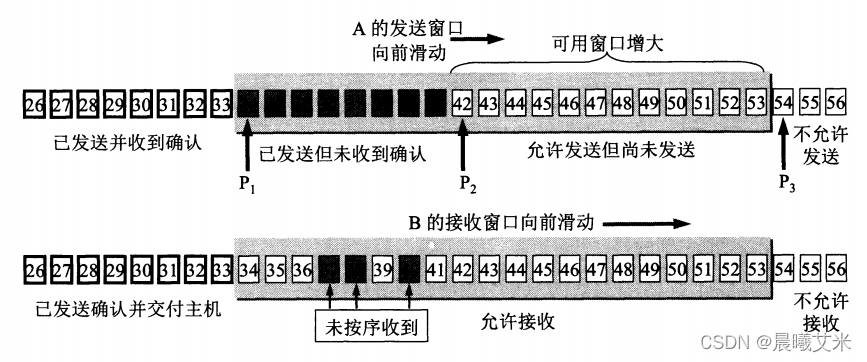
假定B以收到序号为31的数据,并把序号为31~33的数据交付主机,然后把接收窗口向前移动3个序号,并删除已交付数据缓存(如上图)。同时给A发送确认,窗口大小仍为20,确认号34。图中可以注意到,已经收到了序号为37,38和40的数据,但这些都未按序到达,同样按以上方法暂存到接收窗口中。
A收到B的确认后,就可以把发送窗口向前滑动3个序号,即P1和P3向右移动3序号,但P2不动。A的可用窗口在增大。
此时A继续发送数据,指针P2向前移和P3重合。发送窗口内的序号都已用完,但还没有再收到确认。由于A的发送窗口已满,可用窗口为0,就必须停止发送了。

为了保证可靠传输A不能猜测:“或许B收到了吧!”,A只能认为B还没收到这些数据。于是A经过一端时间后(超时计数器时间)重传此段数据,重新计时,直到收到B的确认为止。