国内开源数据集TT100K(安全标志数据集)
TT100K数据集中提供了annotations。json标注文件,train文件夹里有3000多张图片,test文件夹中有3000多张图片。
无人驾驶技术一般分为自主式和网连化
**自主式:**通过搭载多种先进的自主传感器去获取周围车辆状态
**网连化:**通过V2X(车用无线通信技术)获取超视距离范围内交通参与者状态和意图。
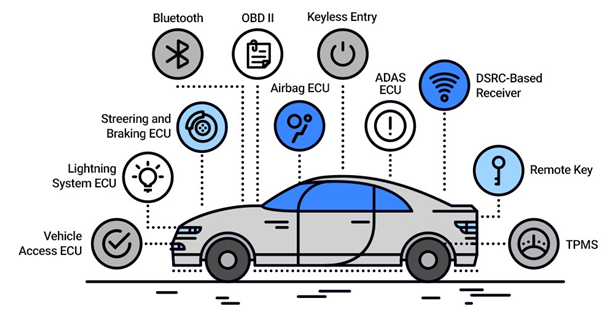
无人驾驶汽车有感知,规划,控制三大核心组件

(1)感知系统:感知指的是汽车从周围环境中去获得信息增强自己对周围环境的判断理解力,机器视觉式环境感知中最重要的一个环节,用相机去获取图像的方式感知周围环境。
(2)规划系统:规划指的是一种决策过程,为了某个目的去执行的一个过程,无人汽车结合利用相机和传感器的信息达到避开障碍物,优化自己的行为轨迹的目的而执行的决策过程。
(3)控制系统:在从轨迹规划获得行车路径后,还需要控制无人汽车的方向盘,制动器等等部件,从而真的控制骑车遵循路径规划运行。
目前多数企业采用激光雷达传感器,激光雷达传感器物理上探测距离更远,但是无法识别语义信息,如交通标志,颜色信息等。
特斯拉在2014年采用纯视觉感知系统,利用安装相机,用相机摄像头去捕捉图片,这样让环境信息更加丰富,但是易受到外界光照影响,对算法和算力要求高。

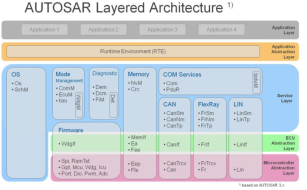
2019年中国汽车工程学会发布的基于LTE-V2X直连通信的车载信息交互系统技术要求:


接入层可以利用手机蜂窝移动流量或者互联网接入无人驾驶系统,应用是根据应用层的消息集做出来制定,这些消息集是通过感知系统获得。
在神经网络中,如果图像模糊,变暗等就不认为这是一个交通标志。我们要进行数据增强生成不同效果图片进行训练,让模型更具有鲁棒性也保证实验的数据量充足。可采用图像对比度变换,高斯变换,形态学闭操作等方法对初始采样的图片进行处理,从而达到增加数据集的数据量的效果。
(1)基于图像对比度变换算法数据增强的研究
交通安全标志行车图都是为RGB的三通道的彩色图片,所以改变图像的对比度即亮度需要先提取出彩色图像的RGB三个通道,之后要对每个通道进行点运算改变像素值从而改变亮度,单一通道图像对比度变换公式如下:

g表示原始图像经过变换后的输出,f表示输入,参数a为尺度因子(用于调节图像分辨率大小,一般 a>0),b为偏置量(可以改变图像亮度)。
(2)基于高斯滤波算法数据增强的研究
高斯滤波核心思想是使用高斯核在图像上进行滑动窗口的操作。高斯函数中间单峰值原理,在距离对称轴越近的值,其值就会越大,因此,高斯核领域中权值大小与其到中心位置的距离有关。