概述
和SAT(分离轴定理)算法一样,GJK算法也只对凸体有效。 GJK算法的优势是:通过support函数(后面会详细讲述),从而支持任何凸体形状之间的碰撞检测;相比SAT算法,你不需要一些额外的操作,比如增加特殊的代码和算法处理曲面形状。
凸体(凸多面体或凸多边形)
面说过,GJK算法只适用于凸体形状。凸体(其实就是一条直线穿越凸体,和该凸体壳的交点不能超过2个)的定义在介绍SAT算法时讲过,可参照那篇文章了解相关信息。
明可夫斯基和(Minkowski Sum)
A + B = {a + b|a∈A, b∈B}
如果两个物体都是凸体,它们的明可夫斯基和也是凸体。
对于减法,明可夫斯基和的概念也成立,这时也可称作明可夫斯基差。
A – B = A + (-B) = {a + (– b)|a∈A, b∈B} = {a – b)|a∈A, b∈B}
接着往下讲,在两个物体之间执行明可夫斯基差操作的解释如下:
如果两个物体重叠或者相交,它们的明可夫斯基差肯定包括原点。


执行这些操作需要物体1的顶点数*物体2的顶点数*2(原作者用的二维向量,如果在三维空间,当然就是*3了,如果是向量减法数量就什么都不用乘了) 个减法操作。物体包含无穷多个点,但由于是凸体,我们可以只对它们的顶点执行明可夫斯基差操作。在执行GJK算法过程中,实际上我们并不需要显式计算物体之间明可夫斯基差,这也是GJK算法的优势所在。
单纯形(Simplex)
我们不需要显式计算物体之间的明可夫斯基差,只要知道它们的明可夫斯基差是否包含原点就ok了。如果包含原点,物体之间就相交,否则,则不相交。
Support函数
下面我们讲述如何建立一个单纯形?首先看什么是support函数,给定两个凸体,该函数返回这两个凸体明可夫斯基差形状中的一个点。我们知道,物体1上的一个点,它的位置减去物体2上的一个点的位置,可以得到它们明可夫斯基差形状上的一个点,但我们不希望每次都得到相同的点。如何保证做到这一点呢?我们可以给support函数传递一个参数,该参数表示一个方向(direction),方向不同,得到的点也不同。
public Point support(Shape shape1, Shape shape2, Vector d) {// d is a vector direction (doesn't have to be normalized)// get points on the edge of the shapes in opposite directionsPoint p1 = shape1.getFarthestPointInDirection(d);Point p2 = shape2.getFarthestPointInDirection(d.negative());// perform the Minkowski DifferencePoint p3 = p1.subtract(p2);// p3 is now a point in Minkowski space on the edge of the Minkowski Differencereturn p3;}开始操作,使用d = (1, 0)
p1 = (9, 9);
p2 = (5, 7);
p3 = p1 - p2 = (4, 2);第二步,使用d = (-1, 0)
p1 = (4, 5);
p2 = (12, 7);
p3 = p1 - p2 = (-8, -2);注意:p1可能是 (4, 5) 或者 (4, 11)。这两个都将在明可夫斯差形状的边上产生一个点。
下一步 假定 d = (0, 1)
p1 = (4, 11);
p2 = (10, 2);
p3 = p1 - p2 = (-6, 9);这样,我们得到图3所示的单纯形。

判定碰撞
前面我们说过,两个物体的明可夫斯基差中的单纯形包含原点时候,这个两个物体相交。在图3中,单纯形没有包含原点,但实际上,这两个物体是相交的。问题在于我们选择的方向,在第三步中,如果我们选择d = (0, -1) 作为方向,那么
p1 = (4, 5);
p2 = (5, 7);
p3 = p1 - p2 = (-1, -2);这样产生的单纯形如图4所示,显然它包含了原点,我们由此能够判定这两个物体之间有碰撞。

可见,方向的选择影响输出结果。如果我们得到的单纯形不包含原点的话,我们能够用另一个点代替,产生新的单纯形来判断是否碰撞。这也是这个算法需要迭代的原因。我们不能保证我们最初选择的三个点包含原点,也不能保证明可夫斯基差形状包含原点。
d = ...
a = support(..., d)
d = ...
b = support(..., d)
AB = a - b
AO = a - ORIGIN
d = AB x AO x AB
c = support(..., d)d = ...
a = support(..., d)
b = support(..., -d)
AB = a - b
AO = a - ORIGIN
d = AB x AO x AB
c = support(..., d)
迭代
即使我们使用上面的方法,也仍有可能在三步内不能得到包含原点的单纯形,所以我们必须用迭代的方法创建单纯形,每次生成的单纯形比上次更接近包含原点。我们也需要检查两个条件:1)现在的单纯形包含原点吗? 2)我们能够包含原点吗?
下面我们看看迭代算法主要代码:
Vector d = // choose a search direction// get the first Minkowski Difference pointSimplex.add(support(A, B, d));//下面开始循环: 第一次迭代
// negate d for the next pointd.negate();// start loopingwhile (true) {// add a new point to the simplex because we haven't terminated yetSimplex.add(support(A, B, d));// make sure that the last point we added actually passed the originif (Simplex.getLast().dot(d) <= 0) {// if the point added last was not past the origin in the direction of d// then the Minkowski Sum cannot possibly contain the origin since// the last point added is on the edge of the Minkowski Differencereturn false;} else {// otherwise we need to determine if the origin is in// the current simplexif (Simplex.contains(ORIGIN)) {// if it does then we know there is a collisionreturn true;} else {// otherwise we cannot be certain so find the edge who is// closest to the origin and use its normal (in the direction// of the origin) as the new d and continue the loopd = getDirection(Simplex);}}
} 下面我们演示一下这个算法框架在图1的例子中如何工作。我们假设最初的方向是2个物体中心的连线的方向。
d = c2 - c1 = (9, 5) - (7.5, 6) = (1.5, -1);
p1 = support(A, B, d) = (9, 9) - (5, 7) = (4, 2);
Simplex.add(p1);
d.negate() = (-1.5, 1);第一次迭代
last = support(A, B, d) = (4, 11) - (10, 2) = (-6, 9);
//we past the origin so check if we contain the origin
// we dont because we are line // get the new direction by (AB x AO) x AB = B(A.dot(C)) - A(B.dot(C))
AB = (-6, 9) - (4, 2) = (-10, 7);
AO = (0, 0) - (-6, 9) = (6, -9);
ABxAOxAB = AO(149) - AB(-123)= (894, -1341) - (1230, -861)= (-336, -480)= (-0.573, -0.819)
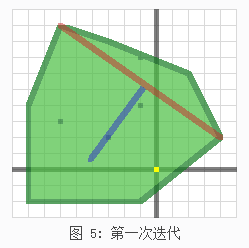
第一次迭代的结果,这时,我们在明可夫斯基差中有一个线段的单纯形(棕色),以及下一次使用的方向(蓝色),这个方向过垂直于上次增加的两个顶点形成的线段(蓝色垂直于棕色)。注意,这个方向不需要归一化,这儿归一化主要是验证给定方向的缩放是否有效。
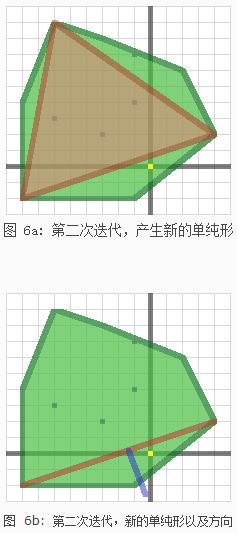
第二次迭代
last = support(A, B, d) = (4, 5) - (12, 7) = (-8, -2)
proj = (-8, -2).dot(-336, -480) = 2688 + 960 = 3648
//we past the origin so check if we contain the origin
//we dont (see Figure 6a)
// the new direction will be the perp of (4, 2) and (-8, -2)
// and the point (-6, 9) can be removed[把离原点较远的点移去]
AB = (-8, -2) - (4, 2) = (-12, -4);
AO = (0, 0) - (-8, -2) = (8, 2);
ABxAOxAB = AO(160) - AB(-104)= (1280, 320) - (1248, 416)= (32, -96)= (0.316, -0.948)
第三次迭代
last = support(A, B, d) = (4, 5) - (5, 7) = (-1, -2)
proj = (-1, -2).dot(32, -96) = -32 + 192 = 160
// we past the origin so check if we contain the origin
// we do (Figure 7)!检测单纯形
在上面的算法中,我们通过图和伪代码的形式进行了两个操作:一个是怎么知道现在的单纯形是否包含原点;另一个是我们怎么选择下一次迭代的方向。在前面的伪代码中,为了便于理解,我把这两个步骤分开,但实际上他们应该放在一起,应为它们有很多共用的东西。
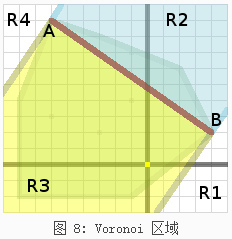
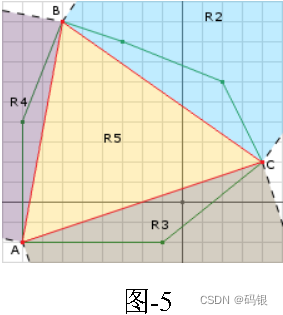
线段的两个端点是A和B,A是增加到单纯形的最后一个顶点。我们知道A和B在明可夫斯基差的边上,因此原点不能位于R1和R4区域,这是因为11行的代码没有返回false,即AB和AO的点积大于0,所以原点位于R2或者R3区域。当单纯形(这儿是线段)没有包括原点的时候,我们就选择一个新的方向,准备下一次迭代。这可以通过下面的代码完成:
// the perp of AB in the direction of O can be found by
AB = B - A;
AO = O - A;
perp = AB x AO x AB;第二次迭代中个,我们得到一个三角形单纯形(ABC)(图9)
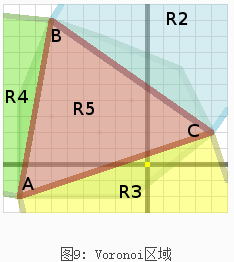
图中白色的区域不会被测试,因为通过了11行代码的测试[否则会返回false],显然原点不会位于该区域。R2区域也不可能包含原点,因为上一个方向是在相反的方向,所以我们需要测试的是R3,R4,R5区域,我们能够执行AC x AB x AB 得到一个垂直于AB的向量,接着执行 ABPerp.dot(AO) 去判定是否原点在R4区域(小于0的话不在R4)。
AB = (-6, 9) - (-8, -2) = (2, 11)
AC = (4, 2) - (-8, -2) = (12, 4)
// AC x AB x AB = AB(AC.dot(AB)) - AC(AB.dot(AB))
ABPerp = AB(68) - AC(125)= (136, 748) - (1500, 500)= (-1364, 248)= (-11, 2)
// compute AO
AO = (0, 0) - (-8, -2) = (8, 2)
ABPerp.dot(AO) = -11 * 8 + 2 * 2 = -84
// its negative so the origin does not lie in R4AB = (-6, 9) - (-8, -2) = (2, 11)
AC = (4, 2) - (-8, -2) = (12, 4)
// AB x AC x AC = AC(AB.dot(AC)) - AB(AC.dot(AC))
ACPerp = AC(68) - AB(160)= (816, 272) - (320, 1760)= (496, -1488)= (1, -3)
// compute AO
AO = (0, 0) - (-8, -2) = (8, 2)
ACPerp.dot(AO) = 1 * 8 + -3 * 2 = 2
// its positive so that means the origin lies in R3正值表示在R3,负的表示在R5AC x AO x AC
这时,已经不需要点B,所以我们去掉它。最终代码如下所示:
Vector d = // choose a search direction// get the first Minkowski Difference pointSimplex.add(support(A, B, d));// negate d for the next pointd.negate();// start loopingwhile (true) {// add a new point to the simplex because we haven't terminated yetSimplex.add(support(A, B, d));// make sure that the last point we added actually passed the originif (Simplex.getLast().dot(d) <= 0) {// if the point added last was not past the origin in the direction of d// then the Minkowski Sum cannot possibly contain the origin since// the last point added is on the edge of the Minkowski Differencereturn false;} else {// otherwise we need to determine if the origin is in// the current simplexif (containsOrigin(Simplex, d) {// if it does then we know there is a collisionreturn true;}}}public boolean containsOrigin(Simplex s, Vector d) {// get the last point added to the simplexa = Simplex.getLast();// compute AO (same thing as -A)ao = a.negate();if (Simplex.points.size() == 3) {// then its the triangle case// get b and cb = Simplex.getB();c = Simplex.getC();// compute the edgesab = b - a;ac = c - a;// compute the normalsabPerp = tripleProduct(ac, ab, ab);acPerp = tripleProduct(ab, ac, ac);// is the origin in R4if (abPerp.dot(ao) > 0) {// remove point cSimplex.remove(c);// set the new direction to abPerpd.set(abPerp);} else {// is the origin in R3if (acPerp.dot(ao) > 0) {// remove point bSimplex.remove(b);// set the new direction to acPerpd.set(acPerp);} else{// otherwise we know its in R5 so we can return truereturn true;}}} else {// then its the line segment caseb = Simplex.getB();// compute ABab = b - a;// get the perp to AB in the direction of the originabPerp = tripleProduct(ab, ao, ab);// set the direction to abPerpd.set(abPerp);}return false;}上面是二维凸多边形碰撞检测的代码。在判断原点是否包含在多面体中(两个物体的明可夫斯基差)时,我们使用了在基于三角形的单纯形测试法。这是根据Caratheodory定理:一个凸多面体的中任意一个点,能够被表示为其n+1点的组合。凸多面体是2维的,所以测试时用了三角形(3个点),在3D的情况下,我们则需要测试四面体就ok了(4个点)。
现在已经完成了GJK碰撞检测算法教程。最初的GJK算法是计算两个凸体之间的距离。另外,如果你需要碰撞信息,比如法向和深度,你应该自己修改GJK算法或者把它和别的算法结合起来。EPA就是一个这样的算法。