碰撞检测GJK算法论文解析二
- The Theoretical Algorithm
- 内容详解
- 初探The Distance Subalgorithm
- 内容详解
- Appendix Ⅱ
- 涉及的概念
- 内容详解
接上文,本篇文章讲解GJK算法论文的第四、第五部分前半部分,这是整个算法最为核心的部分。第四部分阐述了算法的核心思想,而第五部分则给出了可行的算法流程。不废话,直接进入正题。
The Theoretical Algorithm
内容详解
这一节的主要内容就是介绍寻找 v ( K ) v(K) v(K)的算法,其中 K K K是凸的并且是紧的。如果 K K K是多面体,那么这个算法能在有限次迭代后找到 v ( K ) v(K) v(K)。
这个算法的主要思想如下:在 K K K中生成一系列的多面体 c o V k co\space V_k co Vk,并且序列 v ( c o V k ) v(co\space V_k) v(co Vk)会收敛于 v ( K ) v(K) v(K)。为了表述这个算法,需要引进以下定理:
定理1:设 K ⊂ R m K \subset R^m K⊂Rm, K K K是闭集且是凸的,然后定义函数 g K : R m → R g_K:R^m\to R gK:Rm→R为:
g K ( x ) = ∣ x ∣ 2 + h K ( − x ) , x ∈ K ( 25 ) g_K(x) = |x|^2 + h_K(-x), x \in K \kern3em \lparen25\rparen gK(x)=∣x∣2+hK(−x),x∈K(25)那么有以下三个结论:
1)若 g K ( x ) > 0 g_K(x) \gt 0 gK(x)>0,那么在线段 { x , s K ( − x ) } \lbrace x,s_K(-x) \rbrace {x,sK(−x)}间必定存在一个点 z z z,使得 z z z满足 ∣ z ∣ < ∣ x ∣ |z| \lt |x| ∣z∣<∣x∣;
2)只有当 g K ( x ) = 0 g_K(x) = 0 gK(x)=0时, x = v ( K ) x = v(K) x=v(K);
3) ∣ x − v ( K ) ∣ 2 ⩽ g K ( x ) |x - v(K)|^2 \leqslant g_K(x) ∣x−v(K)∣2⩽gK(x)
为了不把思路带偏,定理1的证明这里就不再陈述(因为不了解对理解整个算法没有太大的区别,个人观点),其证明的主要思想是三角不等式,论文的后面也有证明的过程。
接下来阐述距离算法:
1)设 V 0 = { y 1 , y 2 . . . y v } V_0 = \lbrace y_1,y_2...y_v \rbrace V0={y1,y2...yv},其中 y 1 , y 2 . . . y v ∈ K y_1,y_2...y_v \in K y1,y2...yv∈K,并且 1 ⩽ v ⩽ m + 1 1 \leqslant v \leqslant m+1 1⩽v⩽m+1,这一步就是说一开始要在集合中随机选取v个点,当然这个随机是可以伴随一定的策略的。这里再次提醒, K K K必须是多面体,如果是像球这样的物体,这个算法是求不了的,这是因为球会让这个算法无限迭代下去(不过mesh的话也不会有真正意义上的球)。
2)求出 v k = v ( c o V k ) v_k = v(co \space V_k) vk=v(co Vk),就是求出$ y 1 , y 2 . . . y v y_1,y_2...y_v y1,y2...yv这些点构成的凸包到原点的最近的点是什么,而这个点代表的向量会代入到(15)式中进行计算。这个怎么找呢,论文的下一节才给出了算法,所以这里先不提。
3)如果 g K ( v k ) = 0 g_K(v_k) = 0 gK(vk)=0(要注意里面的大小写,大写代表集合,小写代表标号),那么这个点就是我们要找的点,这个时候就可以退出循环。否则进入下一步
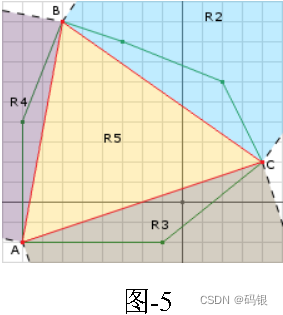
4)设 V k + 1 = V k ^ ⋃ { s K ( − v k ) } V_{k+1} = \hat{V_k} \bigcup \lbrace s_K(-v_k)\rbrace Vk+1=Vk^⋃{sK(−vk)},其中 V k ^ \hat{V_k} Vk^指的是当 v k ∈ c o V k ^ v_k \in co \space \hat{V_k} vk∈co Vk^时, V k ^ \hat{V_k} Vk^中的顶点数最少,举个例子,在二维平面下一个三角形到原点最近的点有三种情况,一是原点落在三角形内部,那么原点需要用三个顶点来进行表示((12)式);二是最近的点落在三角形边上,那么这个点只需要两个顶点就可以表示;还有就是离原点最近的点就是其中一个顶点,那么这个点只用一个点就可以进行表示。然后后面的 { s K ( − v k ) } \lbrace s_K(-v_k)\rbrace {sK(−vk)}表示选择一个尽量靠近原点(向量的长度短),并且离 v k v_k vk远的点A,点A必定会更靠近原点。然后将点A和 V k ^ \hat{V_k} Vk^的并集输入到2)中继续执行。
结合上面对算法的阐述以及论文的Fig.3,这个算法应该是比较清晰的了,而且论文中也有计算过程的描述,所以这里就不多说明了。下面是论文中的图,这里的 V 0 = { z 1 , z 2 , z 3 } V_0=\lbrace z_1,z_2,z_3 \rbrace V0={z1,z2,z3}

接下来是收敛性证明,因为会把思路带偏,这里也不再做过多阐述,有兴趣的可以自己去看
初探The Distance Subalgorithm
内容详解
这一节的内容是对上一节的距离算法的一些细节进行补充,主要是步骤2),这一个小节的论述是在是太精彩了,喜欢数学以及图形的你绝对不能错过。
首先还是设定条件,设 Y = { y 1 , y 2 . . . y v } ⊂ R m Y = \lbrace y_1,y_2...y_v \rbrace \subset R^m Y={y1,y2...yv}⊂Rm,即 Y = V k Y = V_k Y=Vk,这个 V k V_k Vk就是上一节提到的集合。那么从这个算法最终可以将 v ( c o Y ) v(co\space Y) v(co Y)表示成如下形式:
v ( c o Y ) = ∑ i ∈ I S λ i y i v(co\space Y) = \sum_{i \in I_S} \lambda^i y_i v(co Y)=i∈IS∑λiyi ∑ i ∈ I S λ i = 1 λ i > 0 i ∈ I S ⊂ { 1 , 2 , . . . , v } \sum_{i \in I_S} \lambda^i = 1 \lambda^i > 0\space i \in I_S \subset \lbrace 1, 2,..., v \rbrace i∈IS∑λi=1λi>0 i∈IS⊂{1,2,...,v} Y S = { y i , i ∈ I S } i s a f f i n e l y i n d e p e n d e n t ( 29 ) Y_S = \lbrace y_i, i \in I_S \rbrace \space is \space affinely \space independent \kern3em \lparen29\rparen YS={yi,i∈IS} is affinely independent(29)其中 S S S表示集合 Y Y Y的所有非空索引集中的其中一个。可以发现,上面的式子其实就是公式(14)。这里需要注意的是 Y S Y_S YS就是距离算法中4)的 V k ^ \hat{V_k} Vk^,之前提到说 V k ^ \hat{V_k} Vk^是包含最少顶点的集合,这样能提高迭代的效率。
当 v v v的值很小的时候,即便我们对所有顶点的所有组合进行最近点的计算,效率也是很高的,要计算的次数可以通过组合的公式得到:
σ = ∑ k = 1 v [ v ! / ( k ! ( v − k ) ! ) ] \sigma = \sum^v_{k = 1}[v! / (k!(v - k)!)] σ=k=1∑v[v!/(k!(v−k)!)]例如当 v = 4 v = 4 v=4时,那么 σ = 15 \sigma = 15 σ=15。回到距离算法,基于(12)式,可以知道,在三维空间中, V k ^ \hat{V_k} Vk^最多拥有4个点。如果还是不太清楚为什么最多是4,我这里展开解释一下。可能会有人觉得,5个点不可以吗?我们假设可以,那么要表示凸包中的点A的时候,我们会用5个点来表示这个点A,可是在三维空间里面,我们真的需要用5个点来表示一个点吗?因为用4个点的时候我们已经能构成一个四面体了,这个四面体已经能够包含空间内的点了,再多一个是可以,但是没必要,因为这样一来我们要处理的数据就更多了,而且得到的结果说不定还更复杂,而 V k ^ \hat{V_k} Vk^仅仅需要最少的点(再次强调)。然后我们提到 Y S = V k ^ Y_S = \hat{V_k} YS=Vk^,所以下文中的 Y i Y_i Yi就代表 V i ^ \hat{V_i} Vi^.
(30)式使用了一堆奇怪的符号,定理3也使用了一堆奇怪的符号,一开始看得我晕头转向,然后发现在附录二中有详细的说明,所以我们先跳到附录二,然后再回来看定理3
Appendix Ⅱ
涉及的概念
在附录2中将会使用到下面几个概念,需要对其有较为清晰的认识才能保证后面不会晕,有些概念不是三言两语能解释清楚的,所以原谅我直接放上连链接。
- 代数余子式(cofactor):百度百科
- 克莱姆法则(Cramer’s Rule):百度百科
- 多元函数的极值与局部极值:多元函数的极值指的是当 x = x 0 x = x_0 x=x0时,对于 ∀ x ′ ∈ E \forall x' \in E ∀x′∈E都有 f ( x ′ ) ⩽ f ( x 0 ) f(x') \leqslant f(x_0) f(x′)⩽f(x0),那么 f ( x 0 ) f(x_0) f(x0)就是函数 f f f在集合 E E E中的极值。至于局部极值,简单来说,就是在这个点 x l x_l xl附近, f ( x l ) f(x_l) f(xl)最大或最小,然后这个“附近”不一定是全局,它可以是半径为1的球内(三维中),也可以是半径为10的球内,只要在某个半径内满足即可。如果点 f ( x l ) f(x_l) f(xl)是局部极值,且对 x l x_l xl内每个变量的偏导数都存在( x l x_l xl是向量),那么这些偏导数都为0。我这里的描述并不严瑾,主要是要展开的话又会涉及一系列的概念。这里记住一点就是局部极值的偏导数为0(当然前提是存在,不过针对论文描述的问题,偏导数必定存在)就够了。
内容详解
附录2主要内容是要证明定理3,但现在我们抛开这个,把附录2当成是独立的篇章,那么附录2的主要内容就是确定(29)式中 λ i \lambda^i λi的值
首先,我们考虑如何确定 v ( a f f Y S ) v(aff\space Y_S) v(aff YS)的值,其中 Y S ∈ Y Y_S \in Y YS∈Y。如果 Y S Y_S YS中只有1个点,那么直接求距离即可,没有太多讨论的必要,所以这里假设 Y S Y_S YS至少含有2个点,且后面提到的 r r r也至少为2。 v ( a f f Y S ) v(aff\space Y_S) v(aff YS)的形式如下:
v ( a f f Y S ) = ∑ i = 2 r λ i x i ( a ) v(aff\space Y_S) = \sum^r_{i = 2} \lambda^i x_i \kern3em \lparen a\rparen v(aff YS)=i=2∑rλixi(a)根据仿射集的定义有:
λ 1 = 1 − ∑ i = 2 r λ i ( b ) \lambda^1 = 1 - \sum^r_{i = 2} \lambda^i \kern3em \lparen b\rparen λ1=1−i=2∑rλi(b)那么点 v ( a f f Y S ) v(aff\space Y_S) v(aff YS)到原点的距离可以表示成 λ 2 , λ 3 . . . λ r \lambda^2, \lambda^3...\lambda^r λ2,λ3...λr的函数:
f ( λ 2 , λ 3 . . . λ r ) = ∣ x 1 + ∑ i = 2 r λ i ( x i − x 1 ) ∣ 2 ( c ) f(\lambda^2, \lambda^3...\lambda^r) = |x_1 + \sum^r_{i = 2}\lambda^i(x_i - x_1)|^2 \kern3em \lparen c\rparen f(λ2,λ3...λr)=∣x1+i=2∑rλi(xi−x1)∣2(c)上面那个式子可以把求和的项拆开,就会得到一般的距离公式。然后关键点来了, v ( a f f Y S ) v(aff\space Y_S) v(aff YS)是离原点最近的点,那代表什么?没错,就是 f ( λ 2 , λ 3 . . . λ r ) f(\lambda^2, \lambda^3...\lambda^r) f(λ2,λ3...λr)取最小值,之前我们提到了局部最值的概念,这里就正好可以用上。首先,我们要求 f ( λ 2 , λ 3 . . . λ r ) f(\lambda^2, \lambda^3...\lambda^r) f(λ2,λ3...λr)的偏导数,简单起见,这里设r = 3,那么对©式求偏导数可得:
∂ f ∂ λ 2 = 2 λ 2 ( x 2 − x 1 ) ⋅ ( x 1 + λ 2 ( x 2 − x 1 ) + λ 3 ( x 3 − x 1 ) ) = λ 2 ( x 2 − x 1 ) ⋅ ( λ 1 x 1 + λ 2 x 2 + λ 3 x 3 ) = 0 \frac{\partial f}{\partial \lambda^2} = 2\lambda^2(x_2 - x_1)·(x_1 + \lambda^2(x_2 - x_1) + \lambda^3(x_3 - x_1)) = \lambda^2(x_2 - x_1)·(\lambda^1x_1 + \lambda^2x_2 + \lambda^3x_3) = 0 ∂λ2∂f=2λ2(x2−x1)⋅(x1+λ2(x2−x1)+λ3(x3−x1))=λ2(x2−x1)⋅(λ1x1+λ2x2+λ3x3)=0 ∂ f ∂ λ 3 = 2 λ 3 ( x 3 − x 1 ) ⋅ ( x 1 + λ 2 ( x 2 − x 1 ) + λ 3 ( x 3 − x 1 ) ) = λ 3 ( x 3 − x 1 ) ⋅ ( λ 1 x 1 + λ 2 x 2 + λ 3 x 3 ) = 0 \frac{\partial f}{\partial \lambda^3} = 2\lambda^3(x_3 - x_1)·(x_1 + \lambda^2(x_2 - x_1) + \lambda^3(x_3 - x_1)) = \lambda^3(x_3 - x_1)·(\lambda^1x_1 + \lambda^2x_2 + \lambda^3x_3) = 0 ∂λ3∂f=2λ3(x3−x1)⋅(x1+λ2(x2−x1)+λ3(x3−x1))=λ3(x3−x1)⋅(λ1x1+λ2x2+λ3x3)=0然后结合(b)式,再将这几个式子写成矩阵相乘的形式,那么我们可以得到:
∣ 1 1 1 ( x 2 − x 1 ) ⋅ x 1 ( x 2 − x 1 ) ⋅ x 2 ( x 2 − x 1 ) ⋅ x 3 ( x 3 − x 1 ) ⋅ x 1 ( x 3 − x 1 ) ⋅ x 2 ( x 3 − x 1 ) ⋅ x 3 ∣ ∣ λ 1 λ 2 λ 3 ∣ = ∣ 1 0 0 ∣ ( d ) \begin{vmatrix} 1 & 1 & 1 \\ (x_2 - x_1)·x_1 & (x_2 - x_1)·x_2 & (x_2 - x_1)·x_3 \\ (x_3 - x_1)·x_1 & (x_3 - x_1)·x_2 & (x_3 - x_1)·x_3 \end{vmatrix} \begin{vmatrix} \lambda^1 \\ \lambda^2 \\ \lambda^3 \end{vmatrix} = \begin{vmatrix} 1 \\ 0 \\ 0 \end{vmatrix} \kern3em \lparen d\rparen ∣∣∣∣∣∣1(x2−x1)⋅x1(x3−x1)⋅x11(x2−x1)⋅x2(x3−x1)⋅x21(x2−x1)⋅x3(x3−x1)⋅x3∣∣∣∣∣∣∣∣∣∣∣∣λ1λ2λ3∣∣∣∣∣∣=∣∣∣∣∣∣100∣∣∣∣∣∣(d)这就是论文中的(41)式(系数2约掉了)!接下来我们要做的事情就是通过这个式子求出 λ 1 , λ 2 , λ 3 \lambda^1, \lambda^2 ,\lambda^3 λ1,λ2,λ3。求解方程组有挺多方法的,这里用的是克莱姆法则(Cramer’s Rule),因为向量(1, 0, 0)很特殊,在用余子式求解行列式的时候,除了第一行向量(1, 0, 0)所在的那一列的余子式,其余余子式的行列式都为0,这样我们就知道了实际上符号 Δ i ( Y S ) \Delta_i(Y_S) Δi(YS)代表的是克莱姆法则中向量(1, 0, 0)的1所在的行列的代数余子式, 而 Δ ( Y S ) \Delta(Y_S) Δ(YS)代表的是系数矩阵的行列式。拿(d)式做例子,求 λ 2 \lambda^2 λ2,那么根据克莱姆法则有:
Δ 2 ( Y S ) = ∣ 1 1 1 ( x 2 − x 1 ) ⋅ x 1 0 ( x 2 − x 1 ) ⋅ x 3 ( x 3 − x 1 ) ⋅ x 1 0 ( x 3 − x 1 ) ⋅ x 3 ∣ = ( − 1 ) 1 + 2 ∣ ( x 2 − x 1 ) ⋅ x 1 ( x 2 − x 1 ) ⋅ x 3 ( x 3 − x 1 ) ⋅ x 1 ( x 3 − x 1 ) ⋅ x 3 ∣ \Delta_2(Y_S) = \begin{vmatrix} 1 & 1 & 1 \\ (x_2 - x_1)·x_1 & 0 & (x_2 - x_1)·x_3 \\ (x_3 - x_1)·x_1 & 0 & (x_3 - x_1)·x_3 \end{vmatrix} = (-1)^{1 + 2}\begin{vmatrix} (x_2 - x_1)·x_1 & (x_2 - x_1)·x_3 \\ (x_3 - x_1)·x_1 & (x_3 - x_1)·x_3 \end{vmatrix} Δ2(YS)=∣∣∣∣∣∣1(x2−x1)⋅x1(x3−x1)⋅x11001(x2−x1)⋅x3(x3−x1)⋅x3∣∣∣∣∣∣=(−1)1+2∣∣∣∣(x2−x1)⋅x1(x3−x1)⋅x1(x2−x1)⋅x3(x3−x1)⋅x3∣∣∣∣那么 λ 2 = Δ 2 ( Y S ) / Δ ( Y S ) \lambda^2 = \Delta_2(Y_S) / \Delta(Y_S) λ2=Δ2(YS)/Δ(YS)。至此,我们给出了仿射集系数的解的形式。
下一篇文章我们会继续证明定理3,并且会回到第五章,继续论文里的算法,敬请期待。