一、前言
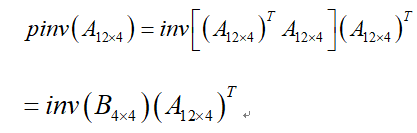
伪逆矩阵(Moore-Penrose pseudoinverse)A定义为A+=VD+UT,其中,U,D和V是矩阵A奇异值分解后得到的矩阵。对角矩阵D的伪逆D+是非零元素取倒数之后再转置得到的。
二、执行代码
#include "funset.hpp"
#include <math.h>
#include <iostream>
#include <vector>
#include <string>
#include <opencv2/opencv.hpp>
#include <Eigen/Dense>
#include "common.hpp"int test_pseudoinverse()
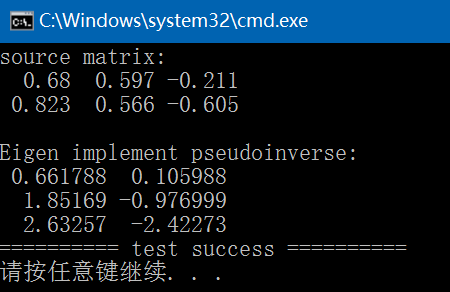
{//std::vector<std::vector<float>> vec{ { 0.68f, 0.597f },// { -0.211f, 0.823f },// { 0.566f, -0.605f } };//const int rows{ 3 }, cols{ 2 };std::vector<std::vector<float>> vec{ { 0.68f, 0.597f, -0.211f },{ 0.823f, 0.566f, -0.605f } };const int rows{ 2 }, cols{ 3 };std::vector<float> vec_;for (int i = 0; i < rows; ++i) {vec_.insert(vec_.begin() + i * cols, vec[i].begin(), vec[i].end());}Eigen::Map<Eigen::Matrix<float, Eigen::Dynamic, Eigen::Dynamic, Eigen::RowMajor>> m(vec_.data(), rows, cols);fprintf(stderr, "source matrix:\n");std::cout << m << std::endl;fprintf(stderr, "\nEigen implement pseudoinverse:\n");auto svd = m.jacobiSvd(Eigen::ComputeFullU | Eigen::ComputeFullV);const auto &singularValues = svd.singularValues();Eigen::Matrix<float, Eigen::Dynamic, Eigen::Dynamic> singularValuesInv(m.cols(), m.rows());singularValuesInv.setZero();double pinvtoler = 1.e-6; // choose your tolerance wiselyfor (unsigned int i = 0; i < singularValues.size(); ++i) {if (singularValues(i) > pinvtoler)singularValuesInv(i, i) = 1.0f / singularValues(i);elsesingularValuesInv(i, i) = 0.f;}Eigen::MatrixXf pinvmat = svd.matrixV() * singularValuesInv * svd.matrixU().transpose();std::cout << pinvmat << std::endl;return 0;
}运行结果: