https://carla.readthedocs.io/en/0.9.13/start_quickstart/
1. 预置条件
Ubuntu 18.04CARLA 0.9.138 GB以上显卡现存20 GB以上硬盘空间Python 2或者Python 3pip
检查 pip 版本
# For Python 3pip3 -V# For Python 2pip -V
升级 pip 版本
# For Python 3pip3 install --upgrade pip# For Python 2pip install --upgrade piptcp默认端口 2000 和 2001
2. 安装 CARLA 服务端
2.1 下载安装包
打卡官方 Github 链接 https://github.com/carla-simulator/carla/blob/master/Docs/download.md 选择 0.9.13 版本,如下图所示

将这两个文件都下载下来。
2.2 解压
tar -xzvf CARLA_0.9.13.tar.gz
2.3 导入附加地图
将下载的 AdditionalMaps_0.9.13.tar.gz 放到 carla 的 import 目录下

然后执行命令导入附加的地图
cd CARLA_0.9.13/
./ImportAssets.sh
3. 安装 CARLA 客户端
CARLA 0.9.12 之前的版本不需要安装 Python 库,它们带有一个 .egg 文件,开箱就可以使用。CARLA 0.9.12+ 以上版本改变了这种行为,有几个选项可以用来安装客户端库。
.egg file
CARLA在PythonAPI/carla/dist/中为不同的Python版本提供了.egg文件,开箱即可使用。在PythonAPI/examples中的每个例子脚本都包括一个自动寻找这个文件的代码片段。在Linux中,你可能需要把这个文件添加到你的PYTHONPATH中。如果您之前用
pip安装了客户端库,它将优先于.egg文件,你需要先卸载之前的库。
.whl file
CARLA为不同的Python版本提供.whl文件。你需要安装.whl文件。.whl文件可以在PythonAPI/carla/dist/中找到。每个支持的Python版本有一个文件,用文件名表示 (例如,carla-0.9.12-cp36-cp36m-manylinux_2_27_x86_64.whl 表示Python 3.6)。
建议在虚拟环境中安装CARLA客户端库,以避免在使用多个版本时发生冲突。如果你以前安装了客户端库,你应该在安装新库之前卸载旧库。
# Python 3pip3 install <wheel-file-name>.whl# Python 2pip install <wheel-file-name>.whl
Downloadable Python package
CARLA客户端库可以从PyPi下载。这个库与Python 2.7,3.6,3.7, 和3.8版本兼容。要安装它,你需要pip/pip3的20.3版本或以上。
建议在虚拟环境中安装CARLA客户端库,以避免在使用多个版本时发生冲突。
# Python 3pip3 install carla# Python 2pip install carla
本次安装选择第三种方式安装,安装步骤见下面
3.1 安装 miniconda
下载 miniconda ,地址 https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh
安装
./Miniconda3-latest-Linux-x86_64.sh
3.2 创建虚拟环境
conda create -n py27 python=2.7
conda create -n py38 python=3.8
此处可以选择安装不同的版本,注意:ros-bridge 需要安装到 python2.7 的环境中。
通过如下命令查看当前环境已经拥有的虚拟环境:
$ conda info -e
# conda environments:base /home/wohu/miniconda3
py27 * /home/wohu/miniconda3/envs/py27
py38 /home/wohu/miniconda3/envs/py38
可选命令:
conda config --set auto_activate_base false # 关闭自动激活 base 环境
conda config --set report_errors false
激活某个版本的环境
conda activate py38
去激活当前的虚拟环境
conda deactivate
3.3 更换 pip 源
如果 pip 需要升级,则执行命令
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple pip -U
永久更换 pip 源为清华源
pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple
3.4 安装依赖
在 py38 虚拟环境中执行,安装 CARLA 执行所需要的依赖
pip install pygame numpy
3.5 安装 carla 客户端
在 py38 虚拟环境中执行
pip install carla
4. 服务端运行
安装依赖库
sudo apt-get install -y libomp5
在命令行启动 CARLA
cd CARLA_0.9.13/
./CarlaUE4.sh
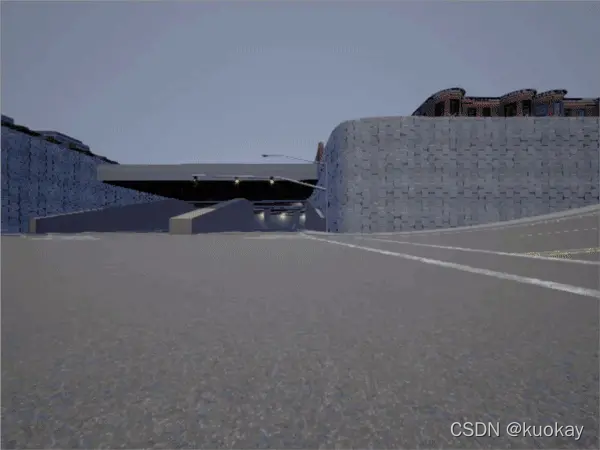
正常启动后如下图所示:

一个包含城市景观的窗口将弹出,这就是观众视角,使用鼠标和 WASD 键在城市中飞行,按住鼠标右键来控制方向。
如果电脑显卡性能较差,可以添加如下可选参数调低渲染 level:
./CarlaUE4.sh -quality-level=Low
启动 CARLA 时,有一些配置选项可用:
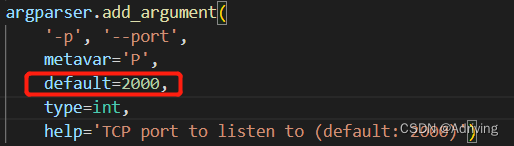
carla-rpc-port=N:侦听端口N处的客户端连接。默认情况下,流式端口Streaming port设置为N+1;carla-streaming-port=N:指定用于传感器数据流的端口。 使用 0 获取随机未使用的端口。 第二个端口将自动设置为N + 1;quality-level={Low,Epic}:更改图形质量级别;-carla-server:让carla以服务的方式运行;-benchmark -fps=15:引擎以1/15秒的固定时间逐步运行;-windowed -ResX=800 -ResY=600:屏幕窗口大小;
脚本 PythonAPI/util/config.py 提供了更多的配置选项,应该在服务端启动后运行。
./config.py --no-rendering # Disable rendering
./config.py --map Town05 # Change map
./config.py --weather ClearNoon # Change weather./config.py --help # Check all the available configuration options
5. 客户端运行
服务端运行之后,等待客户端与之连接,可以用下面的方法连接服务端。
5.1 生成交通流
在 py38 虚拟环境中执行
cd PythonAPI\examples
python -m pip install -r requirements.txt
python generate_traffic.py
上面命令行执行后不要关闭。
5.2 人工控制
在 py38 虚拟环境中执行以下命令,用于生成人工控制汽车。
cd PythonAPI\examples
python manual_control.py

键盘 B 按键可以切换自动控制和人工控制

各个字母代表含义:
W: 前进。↑键也可以前进。S: 刹车。↓键也可以 刹车A/D:A左转D右转。←也可以左转,→也可以右转。Q:Q倒车标志。Q+W可以倒车。Space: 空格是手刹。和S不同。P: 开启/关闭自动驾驶模式。M: 切换到手动模式。,/.: 加减挡。,减档.加档CTRL + W: 同时按下CTRL + W,在放开CTRL + W,车会一直以 60 km/h 的速度前进L: 控制车灯切换。雾灯、近光灯等切换。SHIFT + L: 切换远光灯Z/X: 转向灯。Z左转向,X右转向。I: 车内照明灯。TAB: 切换视角or N: 切换不同类型的camera和lidar, [1-9] : 切换不同类型的camera和lidar,和N不同,N每按下一次,sensor顺序切换。按下数字键,可直接切换到对应sensorG: toggle radar visualizationC: 切换天气,(Shift+C ,天气有多种,切换顺序和C相反)Backspace: 换车型V: 选地图图层 (Shift+V ,地图有多个图层,切换顺序和V 相反)B: 加载当前的地图图层(Shift+B 卸载当前的地图图层)R: 时时记录车辆走行情况CTRL + R: 切换到 R做的记录 (replacing any previous)CTRL + P: 回放R的记录CTRL + +: increments the start time of the replay by 1 second (+SHIFT = 10 seconds)CTRL + -: decrements the start time of the replay by 1 second (+SHIFT = 10 seconds)F1: 显示/不显示页面左侧和sensor相关的一些信息,例如加速度,陀螺仪,GNSS等H/?: H和?可以弹出帮助命令ESC: 退出pygame
![[carla入门教程]-2 pythonAPI的使用](https://img-blog.csdnimg.cn/94905f0f5bba4c5b8fafc2a0d800eb9f.png)




![【仿真】Carla介绍与使用 [1] (附代码手把手讲解)](https://img-blog.csdnimg.cn/20210507211438258.png)



![[carla入门教程]-1 安装carla环境](https://img-blog.csdnimg.cn/e2786b708614436782c033adcb0486c6.png)