import numpy as np
import config
from torch. utils. data import Datasetclass TrainDataSet ( Dataset) : def __init__ ( self) : self. x= np. load( config. DATASET_PATH+ "x_train.npy" ) [ : config. TRAIN_DATASET_SIZES] self. y= np. load( config. DATASET_PATH+ "y_train.npy" ) [ : config. TRAIN_DATASET_SIZES] def __len__ ( self) : return len ( self. x) def __getitem__ ( self, index) : return ( self. x[ index] , self. y[ index] ) class TestDataSet ( Dataset) : def __init__ ( self) : self. x = np. load( config. DATASET_PATH+ 'x_train.npy' ) [ config. TRAIN_DATASET_SIZES: ] self. y = np. load( config. DATASET_PATH+ 'y_train.npy' ) [ config. TRAIN_DATASET_SIZES: ] def __len__ ( self) : return len ( self. x) def __getitem__ ( self, index) : return ( self. x[ index] , self. y[ index] )
import torch
import torch. nn as nn
from torchsummary import summaryclass Block ( nn. Module) : def __init__ ( self, in_channels, out_channels, maxpool= False ) : super ( ) . __init__( ) self. conv = nn. Conv2d( in_channels, out_channels, 3 , 1 , 1 ) self. relu = nn. ReLU( ) self. maxpool = maxpoolself. max_pool = nn. MaxPool2d( 2 , 2 ) def forward ( self, x) : x = self. conv( x) x = self. relu( x) if self. maxpool: x = self. max_pool( x) return xclass Model ( nn. Module) : def __init__ ( self, in_channels= 3 , out_size= 1 ) : super ( ) . __init__( ) self. conv_block = nn. Sequential( Block( in_channels, 16 ) , Block( 16 , 16 , True ) , Block( 16 , 32 ) , Block( 32 , 32 , True ) , Block( 32 , 64 ) , Block( 64 , 64 , True ) , Block( 64 , 128 ) , Block( 128 , 128 , True ) , Block( 128 , 128 ) , Block( 128 , 128 , True ) , ) self. fc_block = nn. Sequential( nn. Linear( 1536 , 100 ) , nn. ReLU( ) , nn. Linear( 100 , 20 ) , nn. ReLU( ) , nn. Linear( 20 , out_size) ) def forward ( self, x) : x = self. conv_block( x) x = x. view( x. size( 0 ) , - 1 ) x = self. fc_block( x) return xif __name__ == '__main__' : model = Model( ) summary( model, input_size= ( 3 , 66 , 200 ) , device= 'cpu' ) data = torch. ones( 1 , 3 , 66 , 200 ) out = model( data) print ( out. shape)
import torch
import torch. nn as nn
import keyboard
import matplotlib. pyplot as plt
import config
from torch. utils. data import DataLoader
from dataset import TrainDataSet
from model import Modelclass Trainer : def __init__ ( self, model, train_dataset, model_state= None ) : self. model = modelself. model_state = model_stateself. train_dataset = train_datasetself. loss_list = [ ] self. main( ) def main ( self) : torch. manual_seed( config. SEED) torch. cuda. manual_seed( config. SEED) model = self. modelloss_list = self. loss_listmodel. to( config. DEVICE) if self. model_state: state = torch. load( self. model_state) model. load_state_dict( state) model. train( ) dataloader = DataLoader( self. train_dataset, batch_size= config. BATCH_SIZE, shuffle= True ) optimizer = torch. optim. Adam( model. parameters( ) , lr= config. LEARNING_RATE) criterion = nn. MSELoss( ) for epoch in range ( config. NUM_EPOCH) : for x, y in dataloader: x, y = x. to( config. DEVICE) . float ( ) , y. to( config. DEVICE) . float ( ) x = x. reshape( x. size( 0 ) , 3 , 66 , 200 ) optimizer. zero_grad( ) out = model( x) loss = criterion( out, y) loss. backward( ) optimizer. step( ) loss_list. append( loss. item( ) ) self. _show_loss( loss_list, '3' ) print ( 'epoc[%i/%i] loss=%.5f' % ( epoch, config. NUM_EPOCH, loss. item( ) ) ) torch. save( model. state_dict( ) , config. MODEL_PATH+ 'model_state.pth' ) def _show_loss ( self, loss_list, key= '3' ) : if keyboard. is_pressed( key) : plt. plot( loss_list) plt. ylim( 0 , 0.1 ) plt. show( ) if __name__ == '__main__' : Trainer( Model( ) , TrainDataSet( ) )

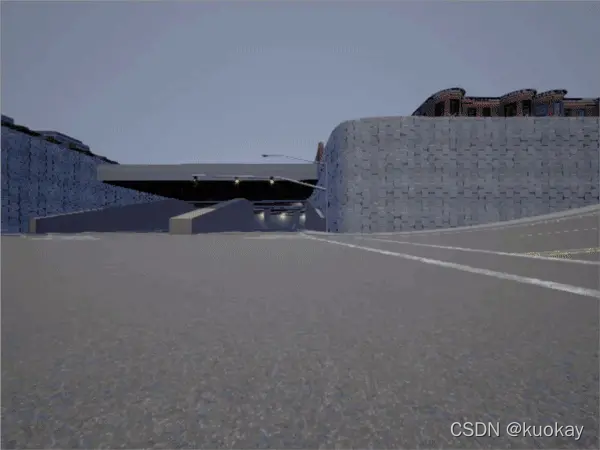
![[carla入门教程]-1 安装carla环境](https://img-blog.csdnimg.cn/e2786b708614436782c033adcb0486c6.png)