关键词:低代码平台,可视化设计,车辆管理,文件管理
车辆管理对于交通行业的重要性不言而喻,这关系到道路交通安全和全社会的生命财产安全。根据中华人民共和国交通运输部2023年政策解读,新修订的《道路运输车辆技术管理规定》将从2023年6月1日起施行,规定了对道路运输车辆技术安全管理的各个环节进行了全面、系统、规范地调整和完善,以落实国家交通强国建设战略,保障道路交通安全。
交通行业车辆管理的重要性就体现在通过各种手段全面加强对车辆及驾驶员的安全管理,从而促进道路交通安全,降低事故率,维护公共利益。基于低代码平台设计的车辆管理系统具有总舵优势:1. 快速开发:低代码平台可以通过拖拽组件和简单设置即可完成应用程序开发,相比传统方式开发效率更高,可以节省大量时间和成本。
2. 易于维护:低代码平台可以减少手动操作,降低了出错概率,同时也更容易维护和更新。
3. 增加灵活性:低代码平台可以自由定制功能模块,用户可以对系统进行必要的改动以适应不同的车队管理场景,并随时根据需求新增或修改报表查询。
4. 提高数据可靠性:基于低代码平台的车辆管理系统可以实现数据的自动收集、分析和处理,提高数据的准确性和可靠性,为企业决策提供有效支持。
5. 降低成本:低代码平台设计的车辆管理系统可以快速开发部署、易于维护,降低了企业的研发成本和运行成本。此外,它还可以提高员工效率和减少人力资源投入,帮助企业降低成本。
6. 实时监控:如纷享车联车辆管理系统等,提供车辆的实时监控、司机管理、车务管理等功能,有助于车队管理人员及时了解车辆的行驶情况,提高车队运营效率。
总而言之,基于低代码平台设计的车辆管理系统可以帮助企业提高效率并降低成本,同时增强车队管理的智能化水平,从而更好地满足市场需求和用户需求。
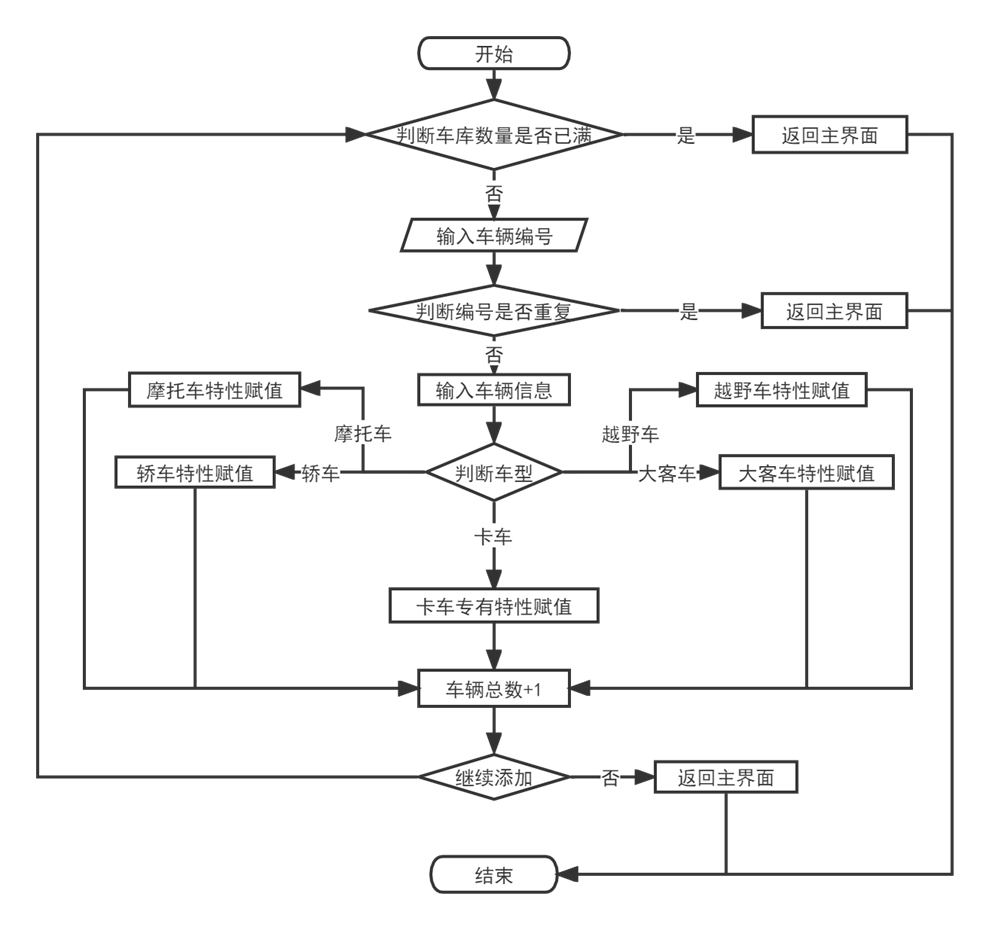
珍宝巴士集团是一家以“珍宝巴士”、“白马巴士”双品牌发展、一体化经营,在国内进行城市公交投资、运营、管理为主业的跨地区经营的港资集团公司。天翎曾根据珍宝集团的内部流程情况,为其打造了一个综合管理平台,囊括了车辆管理、收发文管理、文件分发、内部邮箱、移动办公等功能模块。

系统主页面
集团发文流程:

文件审批可支持附件下载和在线预览

部门发文审批表,可支持附件上传
收文办理流程:

收文办理审批表可选择紧急程度优先级别处理

流程历史跟踪
重大事项流程:用于记录集团重大事项










![[模板匹配霍夫变换]——模板匹配分析、霍夫变换分析](https://img-blog.csdnimg.cn/20210714172117923.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl80MjA2Nzg3Mw==,size_16,color_FFFFFF,t_70)
