配置Json环境
使用Jsoncpp包中的.cpp和 .h文件
解压上面下载的 Jsoncpp 文件,把 jsoncpp-src-0.5.0文件拷贝到工程目录下, 将 jsoncpp-src-0.5.0\jsoncpp-src-0.5.0\include\json 和 jsoncpp-src-0.5.0\jsoncpp-src-0.5.0\src\lib_json 目录里的文件包含到VS工程中,在VS工程的属性C/C++下General中 Additional Include Directories 包含头文件目录 .\jsoncpp-src-0.5.0\include 。在使用的cpp文件中 包含json头文件即可,如: #include "json/json.h" 。将 json_reader.cpp、 json_value.cpp和 json_writer.cpp三个文件的Precompiled Header属性设置为 Not Using Precompiled Headers, 否则编译会出现错误。
试了很多方法,上述方法亲测可用。
准备工作
读图解析Json文件及声明变量
Mat src = imread(".//images//chessboard.jpg");//声明一些存储直线点的变量int i=0;vector < vector<Point2d> > Points;vector<Point2d> XZ_line, YZ_line, XY_line, XZ_line1, YZ_line1, XY_line1;Points.push_back(XZ_line);Points.push_back(YZ_line);Points.push_back(XY_line);Points.push_back(XZ_line1);Points.push_back(YZ_line1);Points.push_back(XY_line1);Point2d orignPoint;//第一步先解析Json数据//用来判断是线还是交点的点string shape_type = "line";//用来区分线条的类型vector<string> linetype;string c = ",";linetype.push_back("XZ_line");linetype.push_back("YZ_line");linetype.push_back("XY_line");linetype.push_back("XZ_line'");linetype.push_back("YZ_line'");linetype.push_back("XY_line'");//声明读取Json文件变量Json::Reader reader;Json::Value root;ifstream in(".//labelme_data//chessboard_line.json", ios::binary);if (!in.is_open()){cout << "打开文件错误\n";return 0;}if (reader.parse(in,root)){int temp = root["shapes"].size();for (int m =0; m < temp; m++){string shapetype = root["shapes"][m]["shape_type"].asString();//判断是否为直线点,还是交点if (shapetype == shape_type){string templinetype = root["shapes"][m]["label"].asString();for (; i < linetype.size(); i++){if (templinetype == linetype[i]){//得到points标签下的数据(此时为string类型)int temppointsize = root["shapes"][m]["points"].size();for (int j = 0; j < temppointsize; j++){string strpoint = root["shapes"][m]["points"][j].toStyledString();//对读取到的字符串进行处理,删除[]和空格字符strpoint.erase(strpoint.find(' '),1);strpoint.erase(strpoint.find('['), 1);strpoint.erase(strpoint.find(' '), 1);strpoint.erase(strpoint.find(']'), 1);//将该字符串按逗号分割vector<string> res;SplitString(strpoint, res, c);//将字符串转为doublePoint2d temppoint;temppoint.x = atof(res[0].c_str());temppoint.y = atof(res[1].c_str());Points[i].push_back(temppoint);}}}i = 0;}//原点位置else if (shapetype == "point"){//得到points标签下的数据(此时为string类型)string strpoint = root["shapes"][m]["points"].toStyledString();//对读取到的字符串进行处理,删除[]和空格字符strpoint.erase(strpoint.find(' '), 1);strpoint.erase(strpoint.find('['), 1);strpoint.erase(strpoint.find('['), 1);strpoint.erase(strpoint.find(' '), 1);strpoint.erase(strpoint.find(']'), 1);strpoint.erase(strpoint.find(']'), 1);//将该字符串按逗号分割vector<string> res;SplitString(strpoint, res, c);//将字符串转为doubleorignPoint.x = atof(res[0].c_str());orignPoint.y = atof(res[1].c_str());}}in.close();}读取到的图像如下:

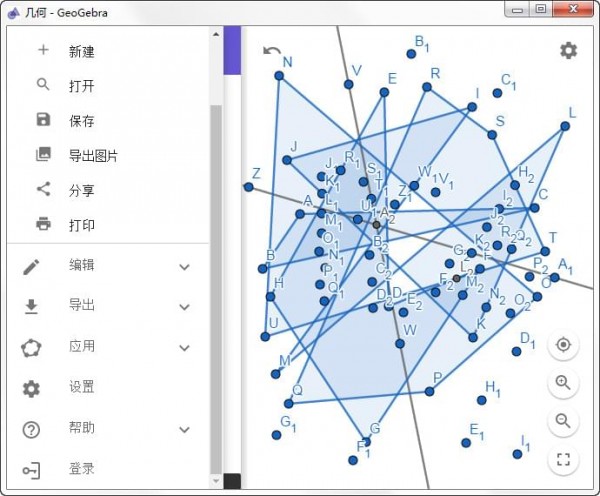
将Json文件里面标记的直线和点加载到图片上,并绘制出来可视化
//点读取完毕,根据点将线条画在图上//复制一张图像//YZ_line, XY_line, XZ_line1, YZ_line1, XY_line1;Mat src1 = src.clone();for (int k = 0; k < Points.size(); k++){int tempSize = Points[k].size()/2;for (int n = 0; n < tempSize; n++){switch (k){case 0:line(src1, Points[k][2 * n], Points[k][2 * n + 1], Scalar(0, 0, 255), 1);XZ_line.push_back(Points[k][2 * n]);XZ_line.push_back(Points[k][2 * n+1]);break;case 1:line(src1, Points[k][2 * n], Points[k][2 * n + 1], Scalar(0, 255, 0), 1);YZ_line.push_back(Points[k][2 * n]);YZ_line.push_back(Points[k][2 * n + 1]);break;case 2:line(src1, Points[k][2 * n], Points[k][2 * n + 1], Scalar(255, 0, 0), 1);XY_line.push_back(Points[k][2 * n]);XY_line.push_back(Points[k][2 * n + 1]);break;case 3:line(src1, Points[k][2 * n], Points[k][2 * n + 1], Scalar(0, 255, 255), 1);XZ_line1.push_back(Points[k][2 * n]);XZ_line1.push_back(Points[k][2 * n + 1]);break;case 4:line(src1, Points[k][2 * n], Points[k][2 * n + 1], Scalar(255, 255, 0), 1);YZ_line1.push_back(Points[k][2 * n]);YZ_line1.push_back(Points[k][2 * n + 1]);break;case 5:line(src1, Points[k][2 * n], Points[k][2 * n + 1], Scalar(255, 0, 255), 1);XY_line1.push_back(Points[k][2 * n]);XY_line1.push_back(Points[k][2 * n + 1]);break;default:break;}}}加载完,不同平面的直线用不同颜色绘制的直线和点如下图所示:

计算影消点
计算影消点,就是根据上面各个平面平行的直线,拟合出平行直线的交点。平行的直线本该没有交点,但经过摄影几何的透视变换,现实世界坐标系下的平行线都会相交于一点,这个点就是影消点,也就是世界坐标系里面的无穷远点,两条平行直线相交于无穷远处。但在摄影几何下,经过透视变换,无穷远点变为影消点,影消点在图像坐标系下可以求。
无穷远点变为影消点最直观的例子,拍摄一条火车铁轨,铁轨最终在图像里面一个点相交。

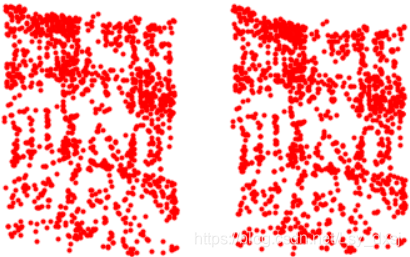
//接下来求图像上的影消点//即计算两个平面平行线的交点//先计算XZ平面,两条平行线的交点//计算出来的line为Vec4f类型,即line[0-3]//斜率为line[1]/line[0],并过点(line[2],line[3])//先将其转为向量相乘的形式即l·x=0的形式,这里l其实为l的转置//l为(line[1],-line[0],-line[1]*line[2]+line[0]*line[3])vector<Vec3d> vecLineXZ;vector<Vec3d> vecLineYZ;vector<Vec3d> vecLineXY;vector<Vec3d> vecLineXZ1;vector<Vec3d> vecLineYZ1;vector<Vec3d> vecLineXY1;for (int i = 0; i < vecXZLine.size(); i++){Vec3d tempvec;tempvec[0] = vecXZLine[i][1];tempvec[1] = -vecXZLine[i][0];tempvec[2] = -vecXZLine[i][1] * vecXZLine[i][2] + vecXZLine[i][0] * vecXZLine[i][3];vecLineXZ.push_back(tempvec);}for (int i = 0; i < vecYZLine.size(); i++){Vec3d tempvec;tempvec[0] = vecYZLine[i][1];tempvec[1] = -vecYZLine[i][0];tempvec[2] = -vecYZLine[i][1] * vecYZLine[i][2] + vecYZLine[i][0] * vecYZLine[i][3];vecLineYZ.push_back(tempvec);}for (int i = 0; i < vecXYLine.size(); i++){Vec3d tempvec;tempvec[0] = vecXYLine[i][1];tempvec[1] = -vecXYLine[i][0];tempvec[2] = -vecXYLine[i][1] * vecXYLine[i][2] + vecXYLine[i][0] * vecXYLine[i][3];vecLineXY.push_back(tempvec);}for (int i = 0; i < vecXZ1Line.size(); i++){Vec3d tempvec;tempvec[0] = vecXZ1Line[i][1];tempvec[1] = -vecXZ1Line[i][0];tempvec[2] = -vecXZ1Line[i][1] * vecXZ1Line[i][2] + vecXZ1Line[i][0] * vecXZ1Line[i][3];vecLineXZ1.push_back(tempvec);}for (int i = 0; i < vecYZ1Line.size(); i++){Vec3d tempvec;tempvec[0] = vecYZ1Line[i][1];tempvec[1] = -vecYZ1Line[i][0];tempvec[2] = -vecYZ1Line[i][1] * vecYZ1Line[i][2] + vecYZ1Line[i][0] * vecYZ1Line[i][3];vecLineYZ1.push_back(tempvec);}for (int i = 0; i < vecXY1Line.size(); i++){Vec3d tempvec;tempvec[0] = vecXY1Line[i][1];tempvec[1] = -vecXY1Line[i][0];tempvec[2] = -vecXY1Line[i][1] * vecXY1Line[i][2] + vecXY1Line[i][0] * vecXY1Line[i][3];vecLineXY1.push_back(tempvec);}//求XZ平面的影消点Vec3d testVanishPoint = RobertColins(XZ_line, src.cols, src.rows);Vec3d pointvanishXZvec = vecLineXZ[0].cross(vecLineXZ[vecLineXZ.size() - 1]);//将齐次点形式转为欧式坐标Point2d pointvanishXZ = Point2d(pointvanishXZvec[0] / pointvanishXZvec[2], pointvanishXZvec[1] / pointvanishXZvec[2]);//将图片放大,将影消点可视化Mat dst(6060, 6060, CV_8UC3, Scalar(255, 255, 255));Rect roiRect = Rect(2827, 2827, src.cols, src.rows);src1.copyTo(dst(roiRect));//定义偏移量Point2d dispoint = Point2d(2828, 2828);line(dst, XZ_line[0] + dispoint, pointvanishXZ + dispoint, Scalar(0, 0, 255), 1);line(dst, XZ_line[XZ_line.size() - 1] + dispoint, pointvanishXZ + dispoint, Scalar(0, 0, 255), 1);//求YZ平面的影消点Vec3d pointvanishYZvec = vecLineYZ[0].cross(vecLineYZ[vecLineYZ.size() - 1]);Point2d pointvanishYZ = Point2d(pointvanishYZvec[0] / pointvanishYZvec[2], pointvanishYZvec[1] / pointvanishYZvec[2]);line(dst, YZ_line[1] + dispoint, pointvanishYZ + dispoint, Scalar(0, 255, 0), 1);line(dst, YZ_line[YZ_line.size() - 1] + dispoint, pointvanishYZ + dispoint, Scalar(0, 255, 0), 1);//求XY平面的影消点Vec3d pointvanishXYvec = vecLineXY[0].cross(vecLineXY[vecLineXY.size() - 1]);Point2d pointvanishXY = Point2d(pointvanishXYvec[0] / pointvanishXYvec[2], pointvanishXYvec[1] / pointvanishXYvec[2]);line(dst, XY_line[1] + dispoint, pointvanishXY + dispoint, Scalar(255, 0, 0), 1);line(dst, XY_line[XY_line.size() - 1] + dispoint, pointvanishXY + dispoint, Scalar(255, 0, 0), 1);//求XZ'平面的影消点Vec3d pointvanishXZ1vec = vecLineXZ1[0].cross(vecLineXZ1[vecLineXZ1.size() - 1]);Point2d pointvanishXZ1 = Point2d(pointvanishXZ1vec[0] / pointvanishXZ1vec[2], pointvanishXZ1vec[1] / pointvanishXZ1vec[2]);line(dst, XZ_line1[0] + dispoint, pointvanishXZ1 + dispoint, Scalar(0, 255, 255), 1);line(dst, XZ_line1[XZ_line1.size() - 1] + dispoint, pointvanishXZ1 + dispoint, Scalar(0, 255, 255), 1);//求YZ'平面的影消点Vec3d pointvanishYZ1vec = vecLineYZ1[0].cross(vecLineYZ1[vecLineYZ1.size() - 1]);Point2d pointvanishYZ1 = Point2d(pointvanishYZ1vec[0] / pointvanishYZ1vec[2], pointvanishYZ1vec[1] / pointvanishYZ1vec[2]);line(dst, YZ_line1[1] + dispoint, pointvanishYZ1 + dispoint, Scalar(255, 255, 0), 1);line(dst, YZ_line1[YZ_line1.size() - 1] + dispoint, pointvanishYZ1 + dispoint, Scalar(255, 255, 0), 1);//求XY'平面的影消点Vec3d pointvanishXY1vec = vecLineXY1[0].cross(vecLineXY1[vecLineXY1.size() - 1]);Point2d pointvanishXY1 = Point2d(pointvanishXY1vec[0] / pointvanishXY1vec[2], pointvanishXY1vec[1] / pointvanishXY1vec[2]);line(dst, XY_line1[1] + dispoint, pointvanishXY1 + dispoint, Scalar(255, 0, 255), 1);line(dst, XY_line1[XY_line1.size() - 1] + dispoint, pointvanishXY1 + dispoint, Scalar(255, 0, 255), 1);//至此,各个平面的影消点都已求出来//根据XZ、YZ、XY平面的影消点,进行相机内参标定,求解W矩阵vector<Point2d> vanishPointVec;vanishPointVec.push_back(pointvanishXZ);vanishPointVec.push_back(pointvanishYZ);vanishPointVec.push_back(pointvanishXY);return 0;
}求得影消点的图片如下图所示:

计算影消点时,用到了柯林斯算法,该算法如下:
//罗伯特·柯林斯方法求影消点
//输入参数为直线的端点,图像的宽高
//输出为影消点的齐次坐标形式
Vec3d RobertColins(vector<Point2d> vecLinePoints,int cols,int rows)
{Vec3d vanishPoint;int size = vecLinePoints.size();//防止坐标点差异过大造成求解精度下降,进行偏移int offset = (cols + rows) / 4;//这里直线端点,以两个点为一组代表一条直线//因此size必为偶数//得出各条直线的方向向量vector <Vec3d> Lines;for (int i = 0; i < size/2; i++){Vec3d startPoint, endPoint;startPoint[0] = (vecLinePoints[2 * i].x-offset);startPoint[1] = (vecLinePoints[2 * i].y-offset);startPoint[2] = offset;endPoint[0] = (vecLinePoints[2 * i + 1].x - offset);endPoint[1] = (vecLinePoints[2 * i + 1].y - offset);endPoint[2] = offset;//两个点坐标向量的叉乘等于,过该两点的直线齐次坐标向量Lines.push_back(startPoint.cross(endPoint));}/*声明一个Mat M形成3×3的“二阶矩”矩阵M为[a_i*a_i a_i*b_i a_i*c_i]M = sum [a_i*b_i b_i*b_i c_i*b_i][a_i*c_i b_i*c_i c_i*c_i]其中取i = 1到n的和。注意,M是对称矩阵。*/Mat M = (Mat_<double>(3, 3)<<0,0,0,0,0,0,0,0,0);for (int i = 0; i < size / 2; i++){Mat tempM = (Mat_<double>(3, 3));tempM.at<double>(0, 0) = Lines[i][0] * Lines[i][0];tempM.at<double>(0, 1) = Lines[i][0] * Lines[i][1];tempM.at<double>(0, 2) = Lines[i][0] * Lines[i][2];tempM.at<double>(1, 0) = Lines[i][1] * Lines[i][0];tempM.at<double>(1, 1) = Lines[i][1] * Lines[i][1];tempM.at<double>(1, 2) = Lines[i][1] * Lines[i][2];tempM.at<double>(2, 0) = Lines[i][2] * Lines[i][0];tempM.at<double>(2, 1) = Lines[i][2] * Lines[i][1];tempM.at<double>(2, 2) = Lines[i][2] * Lines[i][2];M = M + tempM;}//对M矩阵进行特征值分解Mat eigenvector = (Mat_<double>(3, 3));Mat eigenvalue = (Mat_<double>(3, 1));eigen(M, eigenvalue, eigenvector);vanishPoint[0] = eigenvector.at<double>(0, 2)*(offset / (eigenvector.at<double>(0, 2))) + offset;vanishPoint[1] = eigenvector.at<double>(1, 2)*(offset / (eigenvector.at<double>(0, 2))) + offset;vanishPoint[2] = 1;return vanishPoint;
}解析Json文件用到的字符串处理方法:
//分割points字符串类型的点
void SplitString(const string& s, vector<string>& v, const string& c)
{string::size_type pos1, pos2;pos2 = s.find(c);pos1 = 0;while (string::npos != pos2){v.push_back(s.substr(pos1, pos2 - pos1));pos1 = pos2 + c.size();pos2 = s.find(c, pos1);}if (pos1 != s.length())v.push_back(s.substr(pos1));
}






![[模板匹配霍夫变换]——模板匹配分析、霍夫变换分析](https://img-blog.csdnimg.cn/20210714172117923.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl80MjA2Nzg3Mw==,size_16,color_FFFFFF,t_70)