ITOP-IMX6 开发平台是基于 NXP 的 IMX6 系类的芯片开发的一款产品,CPU 采用 Cortex-A9 内核,主频达1Ghz。
ITOP-IMX6 开发板平台均由核心板和底板构成,核心板的主要芯片有 CPU,内存,EMMC,电源管理,EEPROM 等,并且核心板兼容同一底板,使用我们的核心板以及操作系统,您只需要根据您的业务需求来开发自己的底板和应用程序即可,让您从复杂的平台搭建的环境中脱离,加速您产品上线的时间。
核心板采用 10 层 PCB 沉金工艺,紧凑精致,通过了苛刻的 EMI 测试,扩展引脚多大 320 多个,连接方式有连接器和邮票孔俩种方式,符合大部分应用场景,并且核心板连接方式均经过大批量检验,更优的排列给您更放心的连接性能。
核心板介绍
ITOP-IMX6Q(商业级 2G+16G), ITOP-IMX6Q(工业级 1G+8G),ITOP-IMX6QPLUS(增强版 2G+16G) ,ITOP-IMX6D(商业级 1G+8G)四种核心板(连接器/邮票孔)均兼容同一底板。
1、ITOP-IMX6Q(商业级 2G+16G)核心板分为连接器和邮票孔俩种连接方式。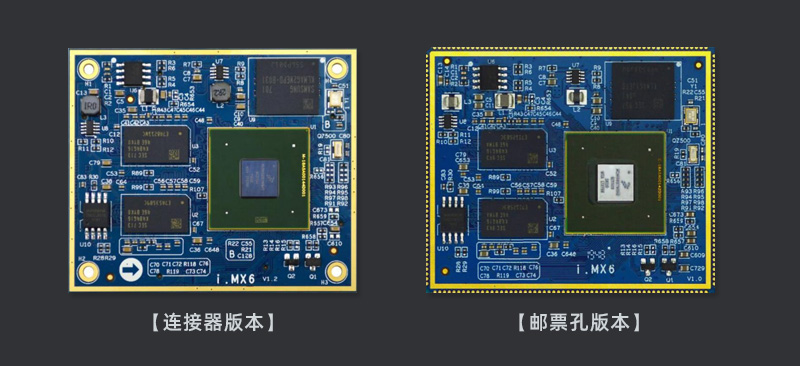
CPU: ARM Cortex-A9 四核 iMX6 处理器
主频: iMX6Q 商业级四核处理器,主频 1GHz
尺寸: 61mm*51mm
高度: 核心板连接器为 1.5mm
内存: 2GB DDR3
存储: 16GB
电源管理: 内部独立
工作电压: 直流 5V 供电
系统支持: Qt、Ubuntu ,debain 和 Android 等系统
引角扩展: 引出脚多达 320 个,满足用户各类扩展需求
商业级运行温度: 0℃至+70℃
扩展参数
千兆以太网:1 路自适应千兆以太网
EIM 通用总线:32 位数据线全引出
SDIO:3 路
JTAG:1 路引出(注:邮票孔底板不支持)
SATA:1 路
CAMARA:DVP 和 MIPI 接口全引出
LCD:双路 LVDS 和 24 位 RGB 接口
HDMI:1 路 V1.4
GPIO:引出
矩阵键盘:引出
PWM:3 路
I2C:3 路
声卡 IIS:1 路
CAN:2 路
USB:HOST+OTG
UART:5 路
pcie:1 路
SPI:2 路
2、ITOP-IMX6Q(工业级 1G+8G)
ITOP-IMX6Q(工业级 1G+8G)核心板分为连接器和邮票孔俩种连接方式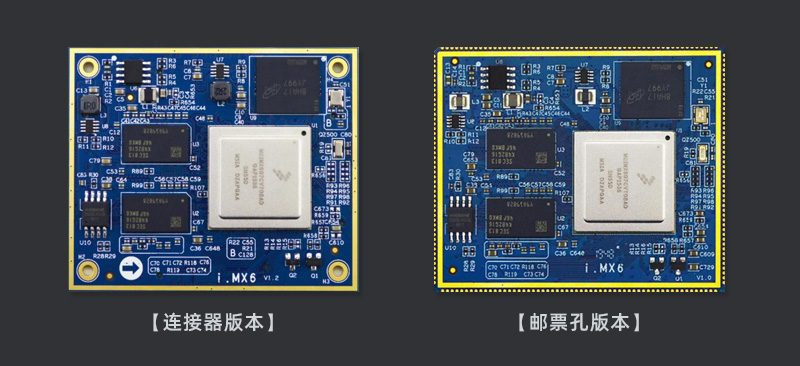
iMX6Q 工业级核心板参数表
CPU: ARM Cortex-A9 四核 iMX6Q 处理器
主频: iMX6Q 工业级四核处理器,工业级 800MHz 主频
尺寸: 61mm*51mm
高度: 核心板连接器为 1.5mm
内存: 2GB DDR3
存储: 16GB
电源管理: 内部独立
工作电压: 直流 5V 供电
系统支持: Qt、Ubuntu ,debain 和 Android 等系统
引角扩展: 引出脚多达 320 个,满足用户各类扩展需求
工业级运行温度:-40℃至+85℃
扩展参数
千兆以太网:1 路自适应千兆以太网
EIM 通用总线: 32 位数据线全引出
SDIO:3 路
JTAG:1 路引出(注:邮票孔底板不支持)
SATA:1 路
CAMARA:DVP 和 MIPI 接口全引出
LCD:双路 LVDS 和 24 位 RGB 接口
HDMI:1 路 V1.4
GPIO:引出
矩阵键盘:引出
PWM:3 路
I2C:3 路
声卡 IIS:1 路
CAN:2 路
USB:HOST+OTG
UART:5 路
pcie:1 路
SPI:2 路
3、ITOP-IMX6QPLUS(增强版 2G+16G)
iTOP-iMX6PLUS 核心板和 iTOP-iMX6Q 核心板参数的主要区别是:它是 iMX6Q 的增强版芯片,显著增强了图形和存储性能,面向较高性能的先进消费电子、汽车和工业多媒体应用的多核平台 ,iTOP-iMX6PLUS目前只有连接器版本。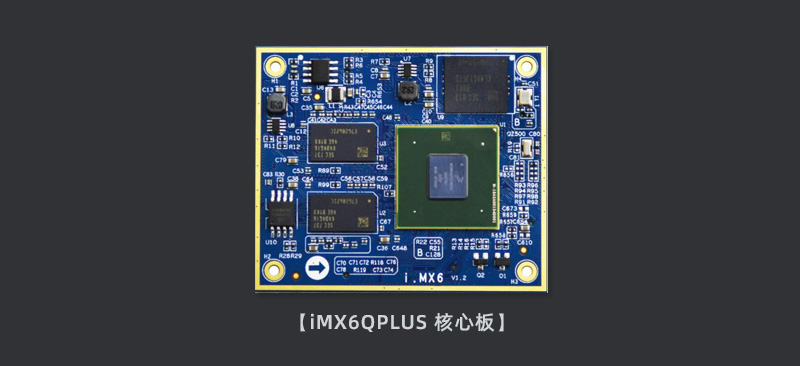
iMX6QPLUS 核心板参数表
CPU: ARM Cortex-A9 四核 iMX6Q PLUS 处理器
主频: iMX6Q PLUS 四核处理器,主频 1GHz
尺寸: 61mm*51mm
高度: 核心板连接器为 1.5mm
内存: 2GB DDR3
存储: 16GB
电源管理: 内部独立
工作电压: 直流 5V 供电
系统支持: Qt、Ubuntu ,debain 和 Android 等系统
引角扩展: 引出脚多达 320 个,满足用户各类扩展需求
工业级运行温度: 0℃至+70℃
扩展参数
千兆以太网:1 路自适应千兆以太网
EIM 通用总线: 32 位数据线全引出
SDIO:3 路
JTAG:1 路引出(注:邮票孔底板不支持)
SATA:1 路
CAMARA:DVP 和 MIPI 接口全引出
LCD:双路 LVDS 和 24 位 RGB 接口
HDMI:1 路 V1.4
GPIO:引出
矩阵键盘:引出
PWM:3 路
I2C:3 路
声卡 IIS:1 路
CAN:2 路
USB:HOST+OTG
UART:5 路
pcie:1 路
SPI:2 路
4、ITOP-IMX6D(商业级 1G+8G)
iTOP-iMX6D 核心板和 iTOP-iMX6Q/iTOP-iMX6Q PLUS 核心板参数的主要区别是没有 SATA 硬盘接口。连接器连接方式:
iMX6D 商业级核心板参数表
CPU: ARM Cortex-A9 双核 iMX6 处理器
主频: iMX6D 商业级双核处理器,主频 1GHz
尺寸: 61mm*51mm
高度: 核心板连接器为 1.5mm
内存: 1GB DDR3
存储: 8GB
电源管理: 内部独立
工作电压: 直流 5V 供电
系统支持: Qt、Ubuntu ,debain 和 Android 等系统
引角扩展: 引出脚多达 320 个,满足用户各类扩展需求
商业级运行温度 0℃至+70℃
扩展参数
千兆以太网:1 路自适应千兆以太网
EIM 通用总线: 32 位数据线全引出
SDIO:3 路
JTAG:1 路引出(注:邮票孔底板不支持)
SATA:1 路
CAMARA:DVP 和 MIPI 接口全引出
LCD:双路 LVDS 和 24 位 RGB 接口
HDMI:1 路 V1.4
GPIO:引出
矩阵键盘:引出
PWM:3 路
I2C:3 路
声卡 IIS:1 路
CAN:2 路
USB:HOST+OTG
UART:5 路
pcie:1 路
SPI:2 路
底板实物图
ITOP-IMX6 开发板板载资源非常丰富,几乎已经把 IMX6Q/D/PLUS 的功能发挥到了极致。下面我们就来具体分析下 ITOP-IMX6 的硬件资源。我们从电源接口开始按照顺时针的方向依次介绍。首先我们来看下底板的资源说明: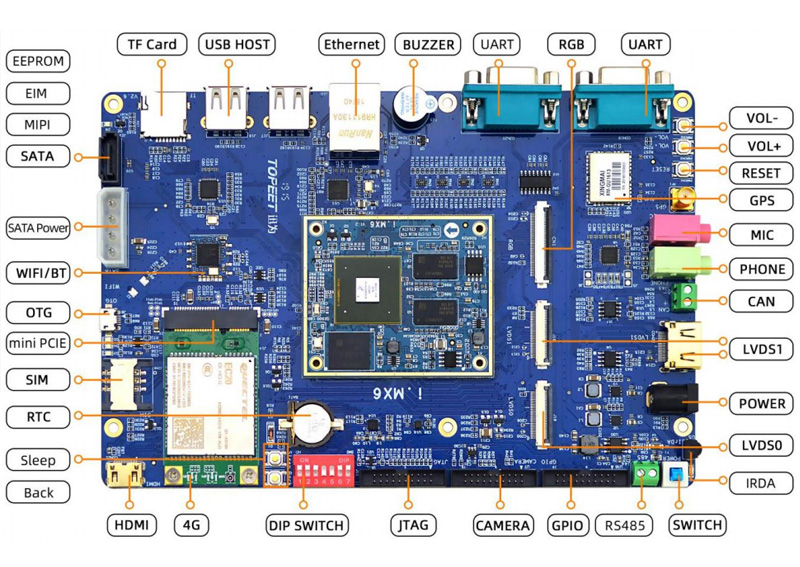

底板参数表
尺寸: 125mm*190mm
运行温度: -40℃到+85 ℃
POWER: 电直流电源输入接口,12V/5A 电源输入 SIM
卡槽: 1 个
SWITCH: 电源开关
4G 模块: 全网通(选配)
LVDS 接口: 2 路
HDMI接口: 标准 HDMI v1.4,1080p 高清分辨率输出
RGB 接口: 1 路
OTG: 1 路
CAN: 1 路 CAN 总线接口
RS485: 1 个
MIC: 支持 MIC 输入 DIP
SWITCH: 1 个 7 位拨码开关
PHONE: 支持耳机输出 JTAG 1 个(注:邮票孔底板不支持)
RESET: 1 个复位按键
CAMERA 接口 1 个支持 500 万摄像头
串口: 2 路串口 GPIO
接口: 20PIN,包括 1 路 SPI 和 2 路 I2C
USB HOST: 2 路
按键: 4 个
网口: 1 路千兆工业级以太网,RJ45 接口
RTC: 实时时钟
TF 卡: 1 个
BUZZER: 1 个蜂鸣器
SATA 1 个 SATA 接口;SATA 电源接口
MIPI 接口 DSI 和 CSI 各一个,支持 LCD 和CAMARA;(注:邮票孔底板不支持)
WIFI: 蓝牙 支持 EIM 总线: 1 路
GPS 模块: 支持(选配) IRDA: 1 个
电子罗盘: 支持(选配) 三轴加速度计: 支持(选配)
ARM恩智浦IMX6系列-产品开发无忧-四种主控核心
article/2025/9/17 12:28:55
相关文章

关于NXP公司的IMX6系列芯片参考资料体系介绍
IMX6系列芯片由FreeScale公司基于ARM核设计开发,该公司于2015年被NXP公司收购。之前由FreeScale提供支持的资源被整合进NXP支持体系,资料内部FreeScale和NXP的标记都有,文档内部原有资源链接失效,给人混乱感。加之IMX6系列芯片本身…
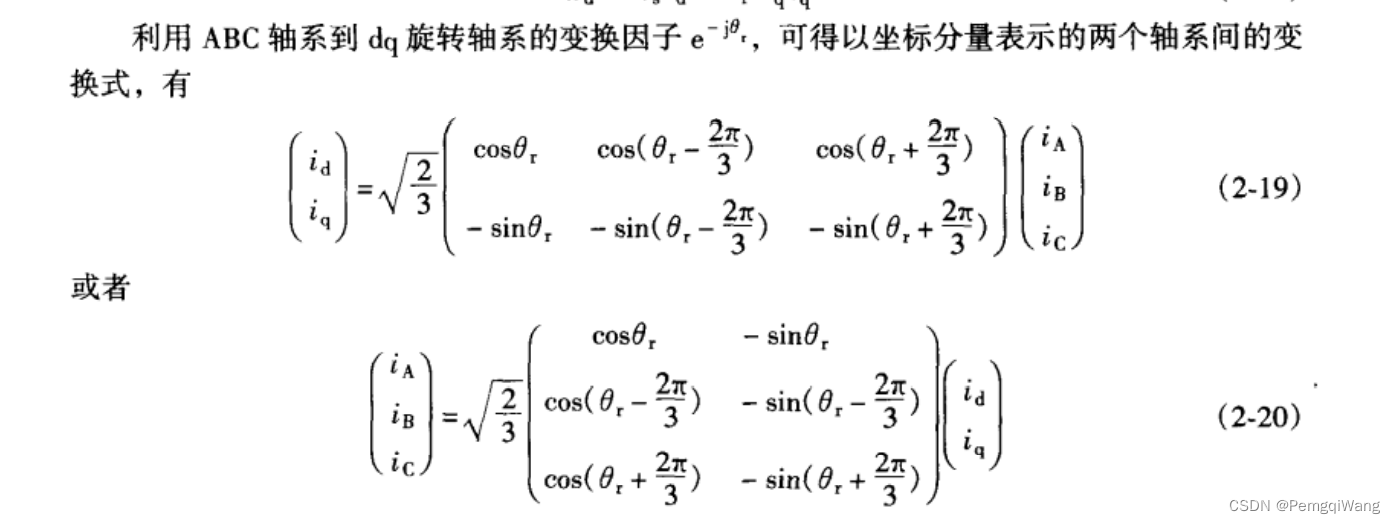
伺服电机矢量控制原理与仿真(1)控制系统的建立
自动控制原理综合实践 直流伺服电机及其控制为什么是六步换向法类比有刷直流电机类比三相异步电机这些差异意味着什么 从六步换向到FOCFOC的大体流程FOC的目的电流环的执行器:SVPWM 从物理走向数学直流伺服电机的数学模型(正弦式)从数学模型到…

台达PLC模拟量或台达伺服电机控制模块程序案例
台达PLC模拟量或台达伺服电机控制模块程序案例,二选一 ID:6958618562901252Anh13309639501 以下内容不属于本博内容,仅仅是相关参考: 台达PLC采用可以编制程序的存储器,用来在其部存储执行逻辑运算、顺序运算、计时、计数和算术运…
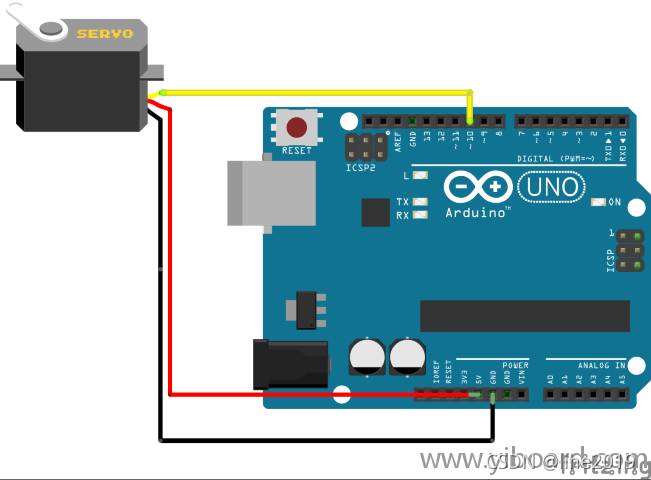
使用Arduino开发板控制伺服电机
大多数情况下,直流电机控制的控制方法都是非常简单的(只需要连接电源和地)。伺服电机有一些不同,它使用3根线连接(电源、地和信号)将电机移动到某个旋转位置。该位置由信号线上发送的信号决定。一旦电机到达…
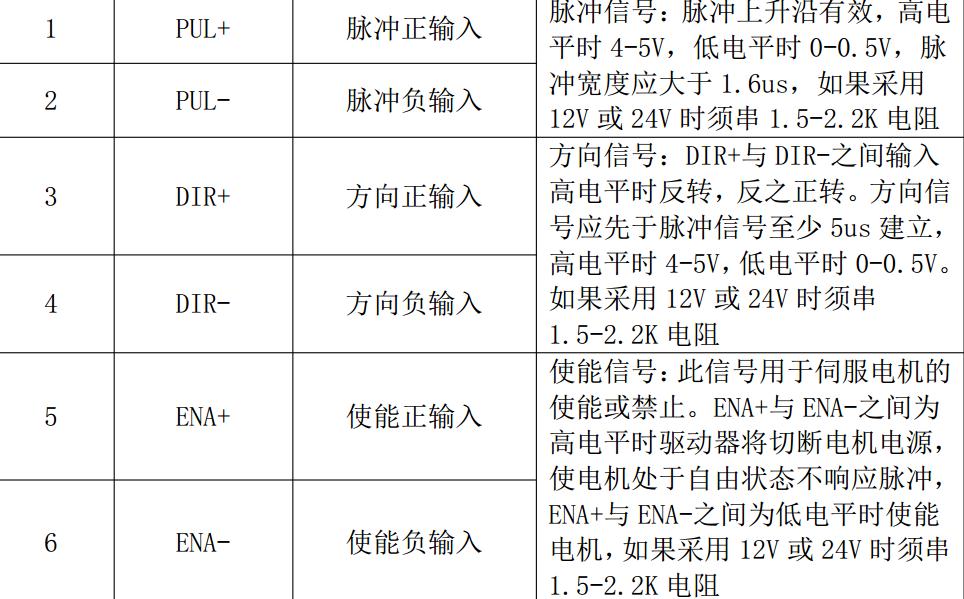
步进伺服电机控制程序: 1.实现步进电机的正转、反转控制 2.相对和绝对位置运动
步进伺服电机控制程序: 1.实现步进电机的正转、反转控制 2.相对和绝对位置运动 3.电机复位找原点功能 4.显示电机的当前位置 硬件:1西门子S7-200PLC 2.昆仑通泰MCGS触摸屏 3.步进电机驱动器(不限制厂家) 西门子200步进电机控制 4810625077520119gao699592

三菱fx3u型PLC和昆仑通泰MCGS触摸屏控制松下伺服电机控制程序
三菱fx3u型PLC和昆仑通泰MCGS触摸屏控制松下伺服电机控制程序 一、包含内容:
mcgs7.7触摸屏程序 2.三菱FX3U型PLC梯形图程序一个,带IO表 3.PLC和伺服电机接线图一个 4.伺服电机使用手册 二、主要功能: 1.伺服电机运动速度设定 2.伺服电机运动…

机器人关节伺服电机PID串级控制
机器人的运动控制系统
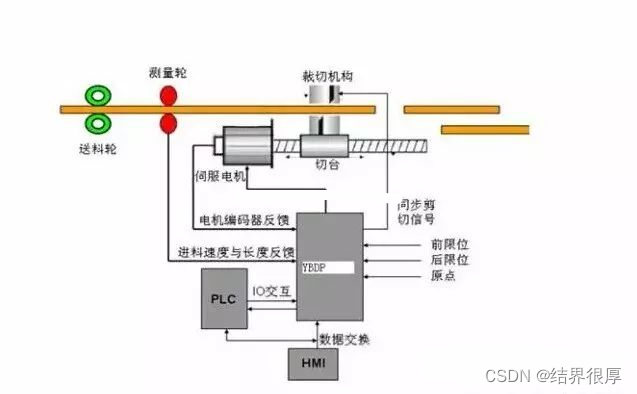
通常由电机控制器、电机驱动、电机本体(多为伺服电机)组成。电机控制器具备智能运算功能,并可传送指令以驱动电机。驱动可提供增压电流,根据控制器指令以驱动电机。电机可以直接移动机器人,也可通过传动系统或链条系统…

机器人关节伺服电机三环控制方式
伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信…

CANOpen DS402伺服电机控制项目总结
公司的电机控制要统一到CANOpen上面来,协议栈用的CanFestival,配合RTThread进行控制。
要控制伺服电机,最先搞明白的就是控制字6040和状态字6041。一共使用过三个厂家的伺服电机,控制字都是一样的,但是状态字各家有自…

STM32微控制器综合实训11 伺服电机控制器设计实验
实验11 伺服电机控制器设计实验 了解伺服电机的应用领域,掌握伺服电机的速度控制模式、伺服电机的位置控制模式。 文章目录 程序设计伺服电机的速度控制模式代码讲解main.ctimer.c 伺服电机的位置控制模式代码讲解main.ctimer.c 编译仿真伺服电机的速度控制模式伺服…
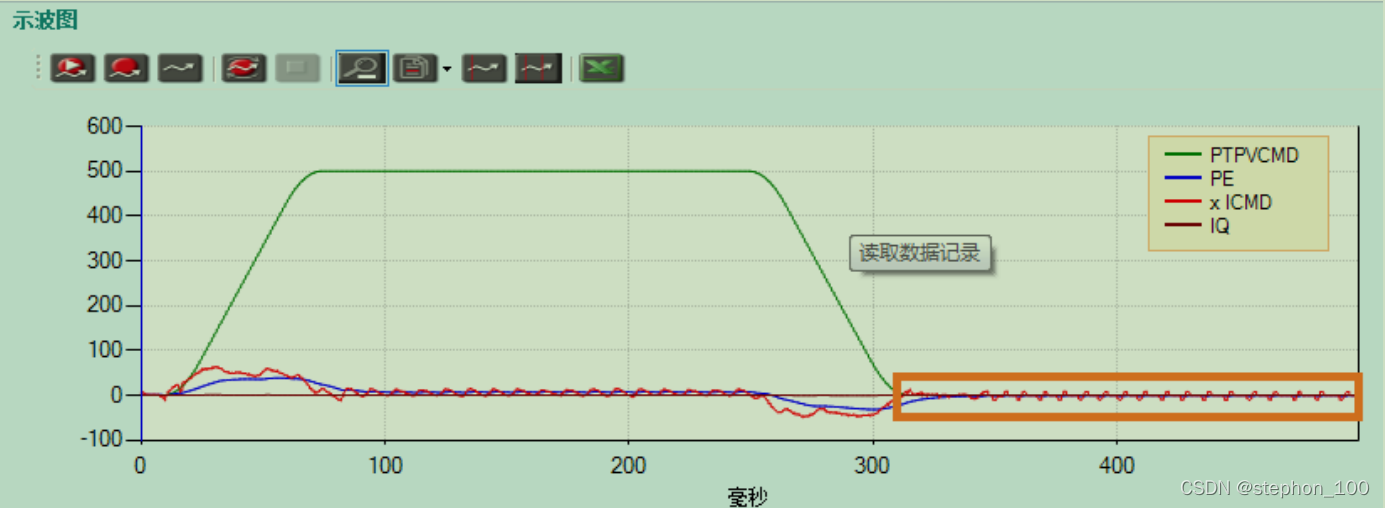
伺服电机PID控制及增益调节
1、伺服电机3环
电流环:最内环,此环在伺服启动器内进行,装在线圈上的霍尔元件通过检测磁场强度转化为电流,把电流负反馈给输入端。电流环是控制的根本,任何控制都是通多电流来作为媒介控制的。可用于转矩控制…


三菱伺服电机控制实例
三菱伺服电机控制实例,(PLC程序,触摸屏,伺服参数,整套,Q系列,也可FX系列,自己设计,不理解可以解释各功能))(参数设置)MR-J4࿰…


松下伺服电机pwm控制连线_从零打造树莓派家庭监控 (一): 伺服电机控制
本文首发自我的博客 MikeTech 现在很多家庭喜欢购买一个摄像头来监控家里的情况,但是往往却无法了解购买第三方摄像头的安全性,摄像头泄露的新闻也每过一段时间就会出现在人们的视野当中。如果购买的摄像头拥有云端查看的功能,那么摄像头录制下来的内容肯定是要上传到摄像头…
3种伺服电机控制方式
伺服电机速度控制和转矩控制都是用模拟量来控制,位置控制是通过发脉冲来控制。具体采用什么控制方式要根据客户的要求以及满足何种运动功能来选择。
接下来,给大家介绍伺服电机的三种控制方式: 如果您对电机的速度、位置都没有要求…
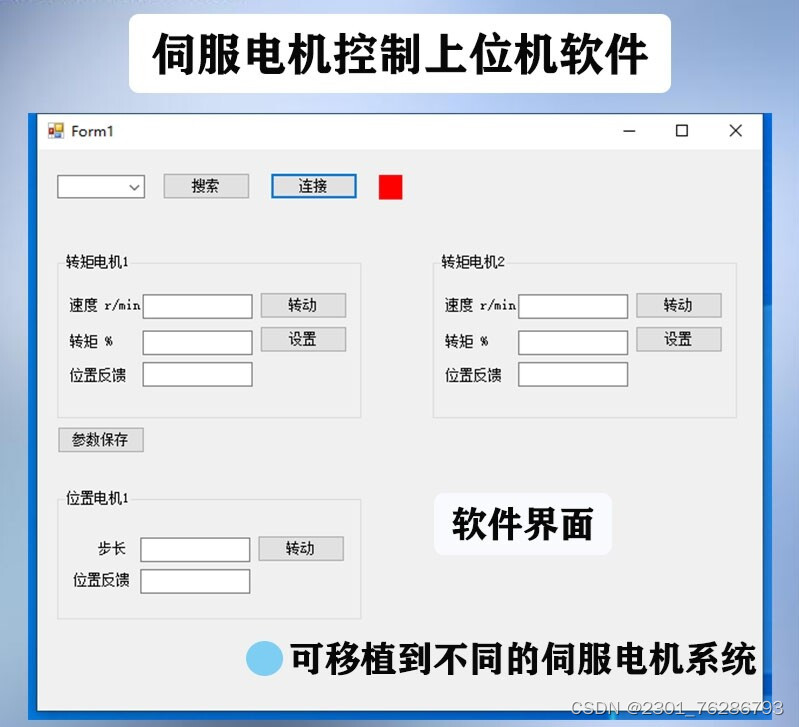
伺服电机控制工程 伺服电机开发实例 modbus开发源码C# winform位置模式力矩模式
伺服电机控制工程 伺服电机开发实例 modbus开发源码C# winform位置模式力矩模式 本工程源码编译环境是visual studio (最好采用2013以上版本),编写语言是C# ,winform工程。 本工程可以实现电脑上位机与伺服电机进行modbus串口通信…
伺服电机要计算机控制,一种伺服电机的控制方法与流程
本发明涉及机械控制技术领域,尤其涉及一种伺服电机的控制方法。 背景技术: 随着机械控制领域的高速发展,对于伺服电机的需要也日益增加,因此对于伺服 电机的控制已引起越来越多人的重视。目前传统的伺服电机的采用的是BLDC控制方法,这 是一种基于方波的驱动控制方式。这种…

verilog实现伺服电机控制
本工程可以实现伺服电机控制
编程语言是verilog
仿真截图如下: 顶层模块如下:
module pid_motion_speed( //input sys_clk, //时钟 sys_rst_n, //复位 key, …