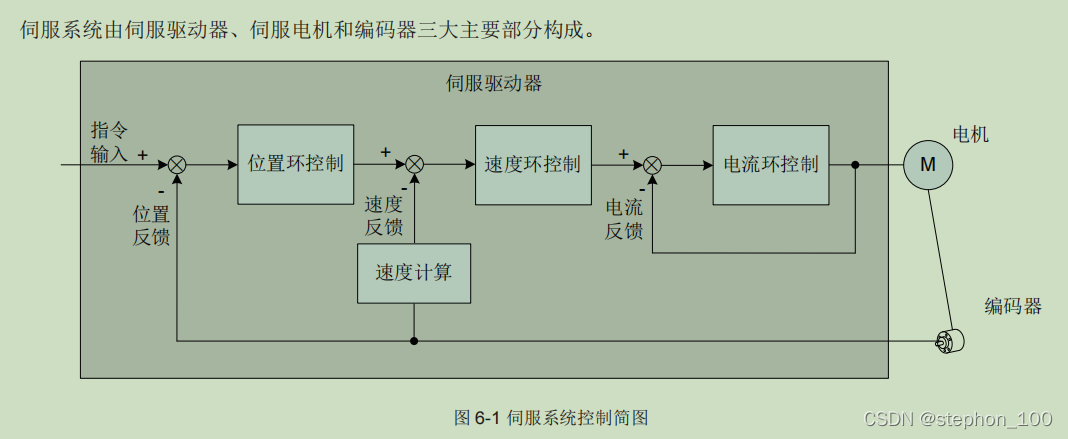
1、伺服电机3环
电流环:最内环,此环在伺服启动器内进行,装在线圈上的霍尔元件通过检测磁场强度转化为电流,把电流负反馈给输入端。电流环是控制的根本,任何控制都是通多电流来作为媒介控制的。可用于转矩控制,通常有重力负载情况下使用。例如如果10V对应5N的力,如果负载低于5N电机正转,如果高于5N电机反转。
速度环:通过检测电机编码器的信号频率来获得电机速度。它的环内PID输出直接就是电流环的设定输入,所以速度环包括了速度环和电流环。用于速度控制。
位置环:最外环,通过检测电机编码器的计数并获得转动角度,通过编码器的频率获得速度。位置环内部PID运算后的输出是速度环的设定输入,位置环的运算包括了所有环的计算,所以运算量最大。用于位置控制,由于位置模式对速度和位置都有严格的控制,所以一般用于定位装置。
2、各环的工作计算原理和联系
位置环:
设定值:外部脉冲经过平滑滤波处理和电子齿轮计算后作为“设定的位置环的标准输入值”
负反馈:编码器反馈的脉冲信号经过偏差计数器计算后的数值
差值:设定值和负反馈之间的差值。
PID调节:将上面差值做PID调节(比例增益调节,无积分微分调节)
速度环:
设定值:位置环差值经PID调节后的值和位置环的设定值的和。
负反馈:编码器反馈的信号经过速度运算器的运算得到。
差值:设定值和负反馈之间的差值。
PID调节:将上面差值做PID调节(通常是比例增益调节,积分调节)
电流环:
设定值:速度环的差值经PID调节后的值。
负反馈:安装在线圈每相上的霍尔元件将磁场转换为电压电流信号作为反馈。
差值:设定值和负反馈之间的差值。
PID调节:将上面差值做PID调节。
最终:将上面电流环的PID调节后的值作为最终的输出值,将其电流作用在电机线圈上实现点机的控制。
3、PID调节
比例控制(P):将输入的差值(误差信号)做比例放大,放大误差信号的强度值,这样作用于电机上就可以加强响应效果,使系统快速响应,减小残差。但容易导致系统震荡或不稳定。比例调节的特点是有差调节,被调节后的状态不会与设定值准确相等,有一定残差。因为只有存在残差才会存在误差信号,才会有比例调节后的输出作用于电机使其为电机提供动力按设定的目标位置转下去。
积分控制(I):输出信号值的变化率和输入值成正比。如果一个系统在进入稳态后存在稳态误差,则控制器中必须要引入积分项,积分项对误差取决于时间的积分,随着时间的增加,积分项会变大。这样即使误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差减小,直到等于0,因此,比例+积分(PI)控制器可以使系统进入稳态后无稳态误差。
数学验证(对时间t积分):
随着时间t的增加误差恒定:5 积分后输出:5t
随着时间t的增加误差增加:5x(x从1逐渐增大) 积分后输出:5xt
随着时间t的增加误差减小:5x(x从1减小到0) 积分后输出:5xt (增大或减小)
随着时间t误差减小成为 0:5x = 0 积分后输出:5xt = 0 随着时间t误差减小成为负:-5x 积分后输出:-5xt
微分控制(D):微分控制中,控制器的输出与输入误差的微分(变化率成正比)。仅有积分控制的不足之处就是积分对于抑制误差的作用是滞后的,因为是以时间的增加来增加调节力的。这样就会造成在系统在调节的过程中可能出现震荡甚至失稳。而且通常自动化系统中会存在有较大惯性的组件或滞后组件,所以抑制误差的作用总是落后于误差的变化。解决办法就是使抑制误差的作用超前。即在误差接近0到时候,抑制误差的作用就应该是0。
数学验证(微分):
随着时间t的增加误差恒定:5 微分后输出:0
随着时间t的增加误差增加:5t 微分后输出:5
随着时间t的增加误差减小:-5t 微分后输出:-5
4、调节案例
ICMD为电流,PTPVCMD为速度,PE为位置误差。
初始时可以看出电机在电流的作用下速度呈现的变化,而速度改变时位置会出现较大的偏差。而且调节的速度滞后速度变化很多。
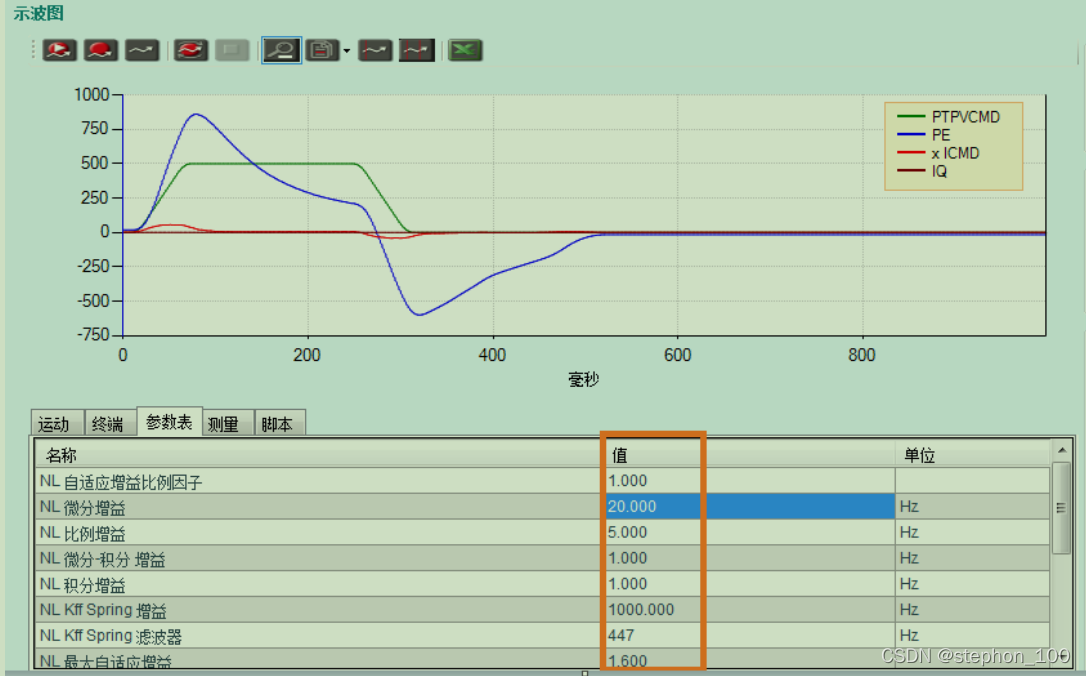
(1)微分调节


增大微分增益可以看出偏差PE的滞后性明显减弱,增加了响应效率,逐渐达到了和速度同步增加减小的状态。而且也使偏差变小了。
(2)比例调节
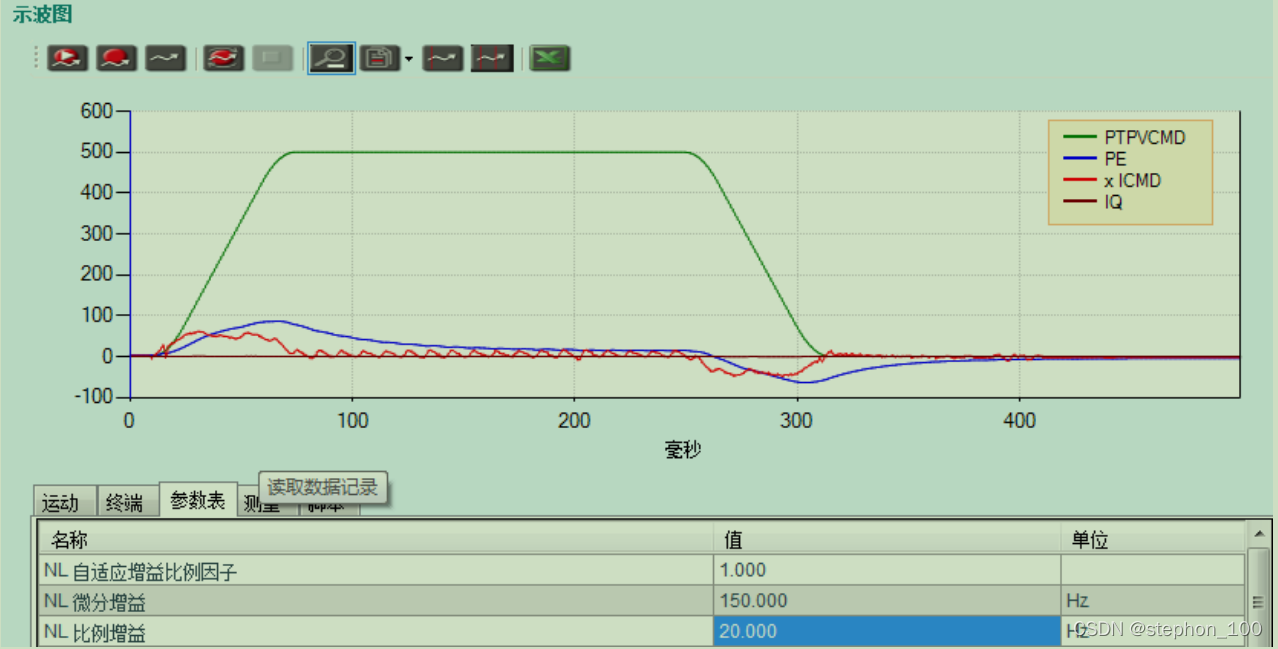
经过比例调节后误差误差的响应更强烈,可以更快的达到目标位置,出现偏差的也更小。
(3)积分调节

在积分项较小的时候,随着时间的增加,误差要经过比较长的时间才能完全消除误差。

增大积分增益后,系统可以在更短的时间里消除误差。
(4)
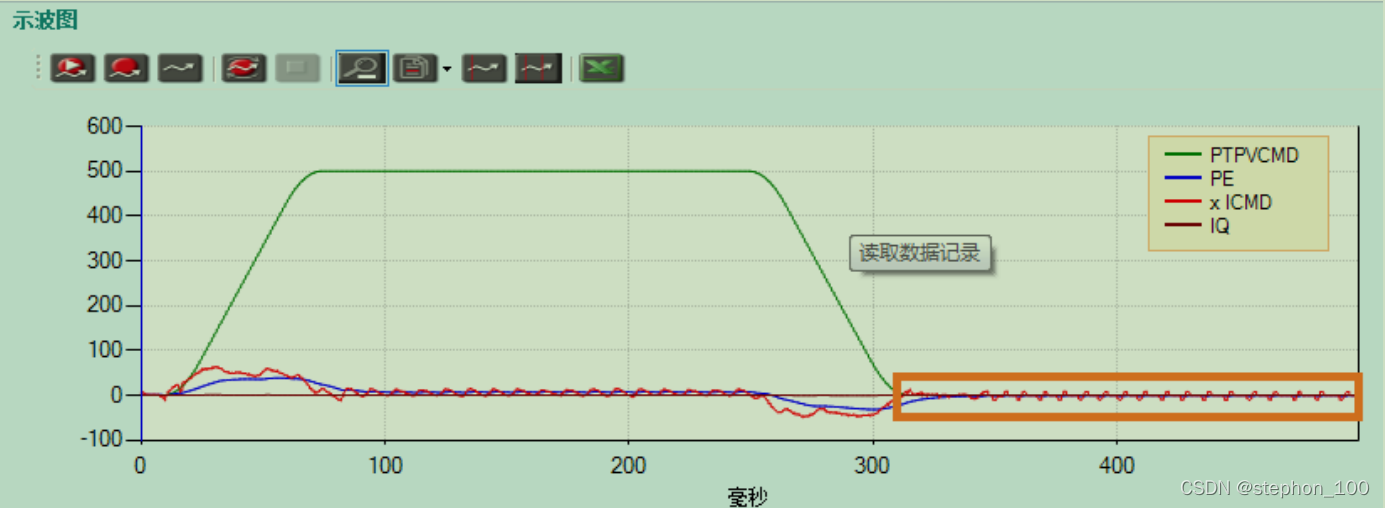
如果某些增益调节的过大,电流会出现较大波动,造成电机抖动和异响,这时要减小增益到合适值。
备注:如果增加比例增益,微分积分增益,积分增益的过程中,电机噪声明显变大。但位置误差还比较大是,可将微分增益降低,则可继续增加这三个增益。