1.简介
伺服系统(servomechanism)是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。直流伺服电机分为有刷和无刷电机。有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。 无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。
交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。大惯量,最高转动速度低,且随着功率增大而快速降低。因而适合做低速平稳运行的应用。
伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 交流伺服电机和无刷直流伺服电机在功能上的区别:交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。
2.控制方式
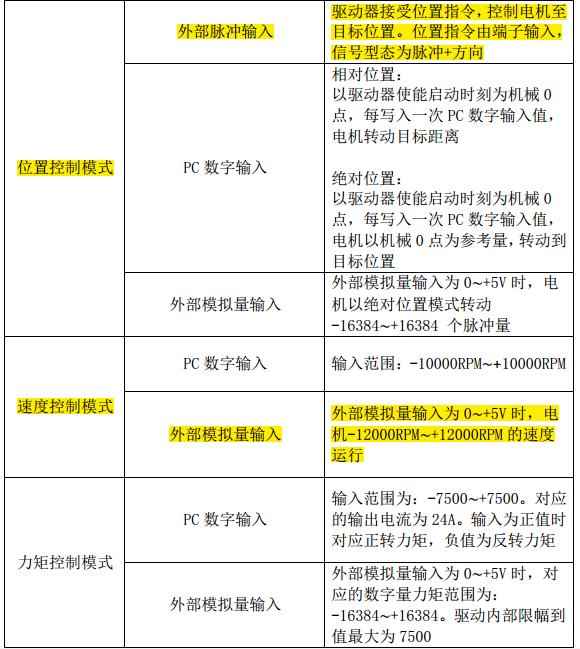
2.1 三种控制方式:速度控制方式,转矩控制方式,位置控制方式 。
速度控制和转矩控制都是用模拟量来控制的。位置控制是通过发脉冲来控制的。具体采用什么控制方式要根据客户的要求,满足何种运动功能来选择。
如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。
如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点。如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。
就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。
对运动中的动态性能有比较高的要求时,需要实时对电机进行调整。那么如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。如果控制器运算速度比较快,可以用速度方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中高端运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是高端专用控制器才能这么干,而且,这时完全不需要使用伺服电机。
具体的:
(1)转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V对应5Nm的话,当外部模拟量设定为5V时电机轴输出为2.5Nm:如果电机轴负载低于2.5Nm时电机正转,外部负载等于2.5Nm时电机不转,大于2.5Nm时电机反转(通常在有重力负载情况下产生)。可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。
应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。
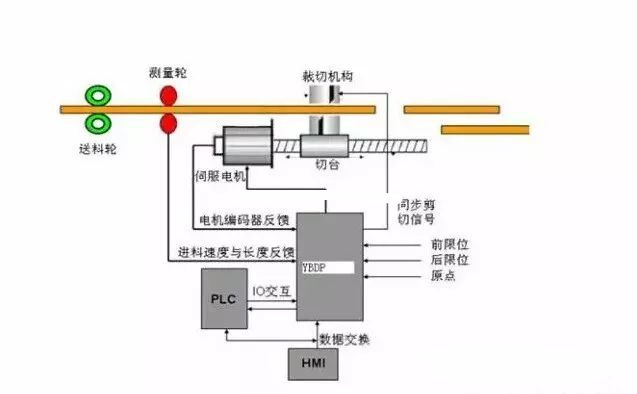
(2)位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
应用领域如数控机床、印刷机械等等。
(3)速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。
2.2 伺服电机的优良性能
(1) 控制精度高
步进电机的步距角一般为1.8(两相)或0.72(五相),而交流伺服电机的精度取决于电机编码器的精度。以伺服电机为例,其编码器为l6位,驱动器每接收2 =65536个脉冲,电机转一圈,其脉冲当量为360‘/65 536=0,0055 ;并实现了位置的闭环控制.从根本上克服了步进电机的失步问题。
(2) 矩频特性好
步进电机的输出力矩随转速的升高而下降,且在较高转速时会急剧下降,其工作转速一般在每分钟几十转到几百转。而交流伺服电机在其额定转速(一般为2000r/min或3000r/min)以内为恒转矩输出,在额定转速以E为恒功率输出。
(3)具有过载能力
2.3 一种直流伺服电机的工作原理
由于本人做的是全向移动机器人,低压系统,AGV车载的是48V直流电源,故使用的是直流伺服电机(非直流电机加编码器,而是低压直流供电的伺服电机)。

伺服单机转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的分辨率(线数1250) 。
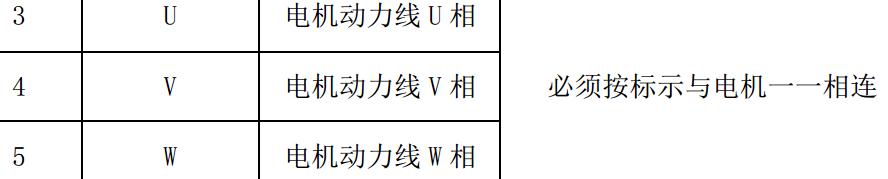
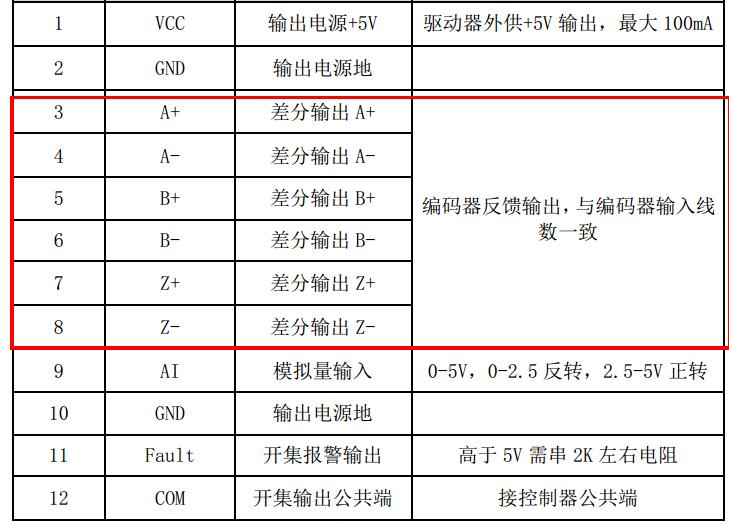
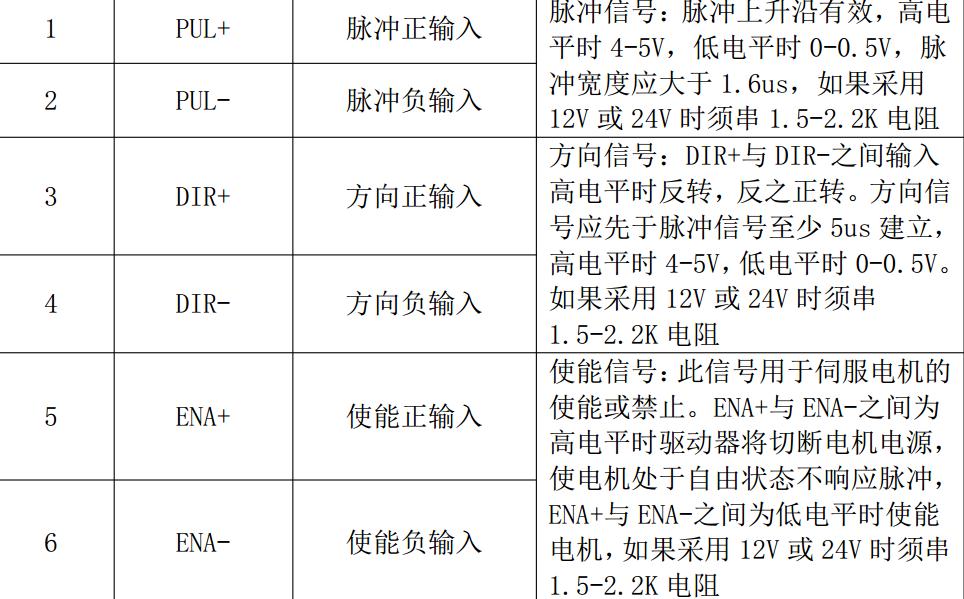
2.4其他接线