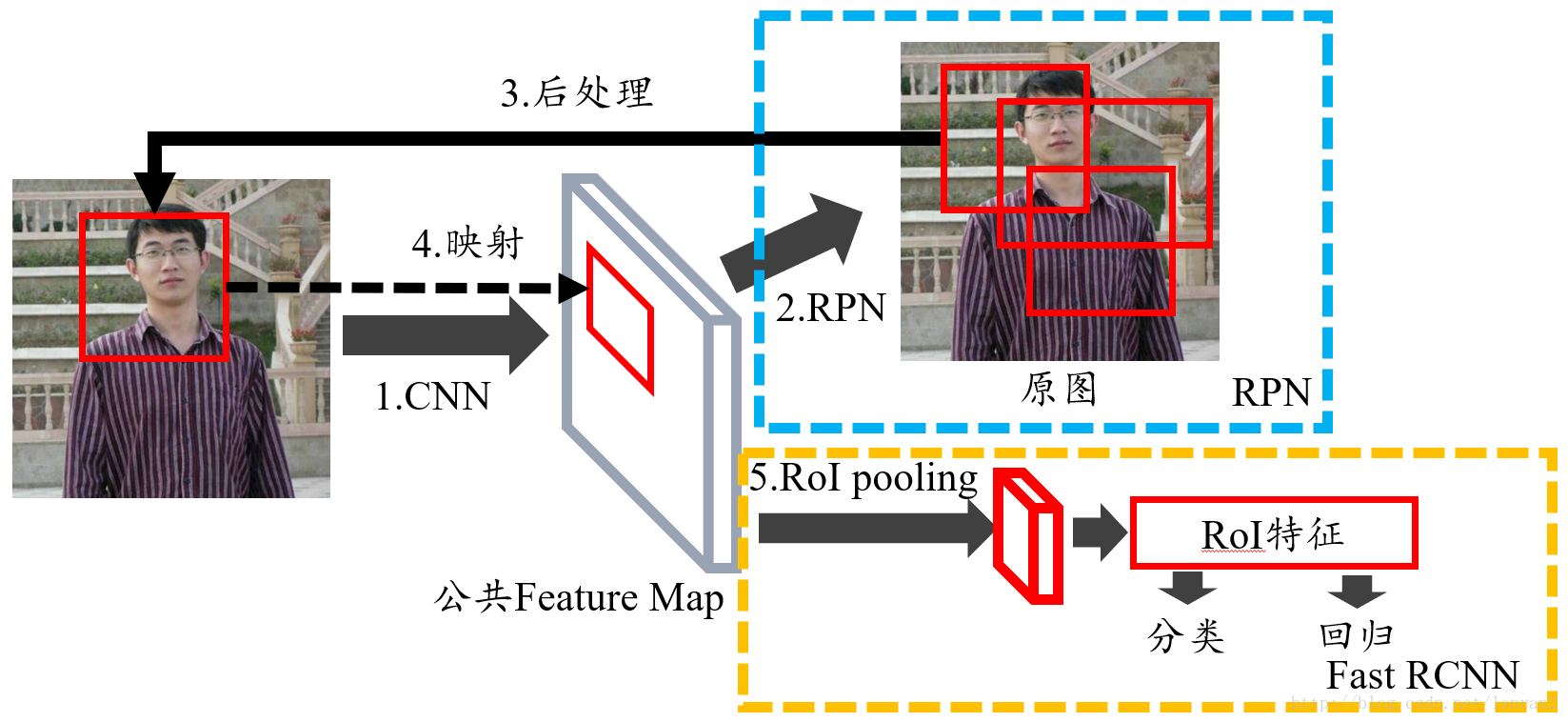
讲完了anchor机制,接下来我们讲RPN(region proposal network)区域候选网络,它的作用是为了得到候选框。
先看以下内容:
faster rcnn结构及代码讲解
原理解释
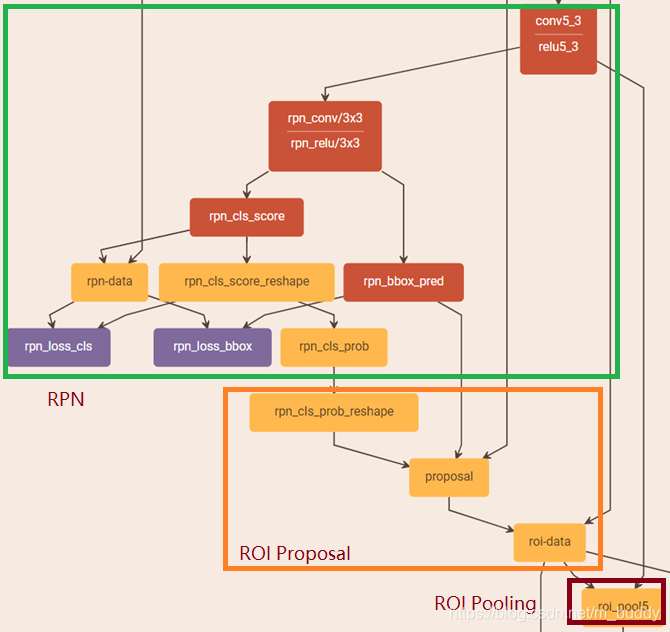
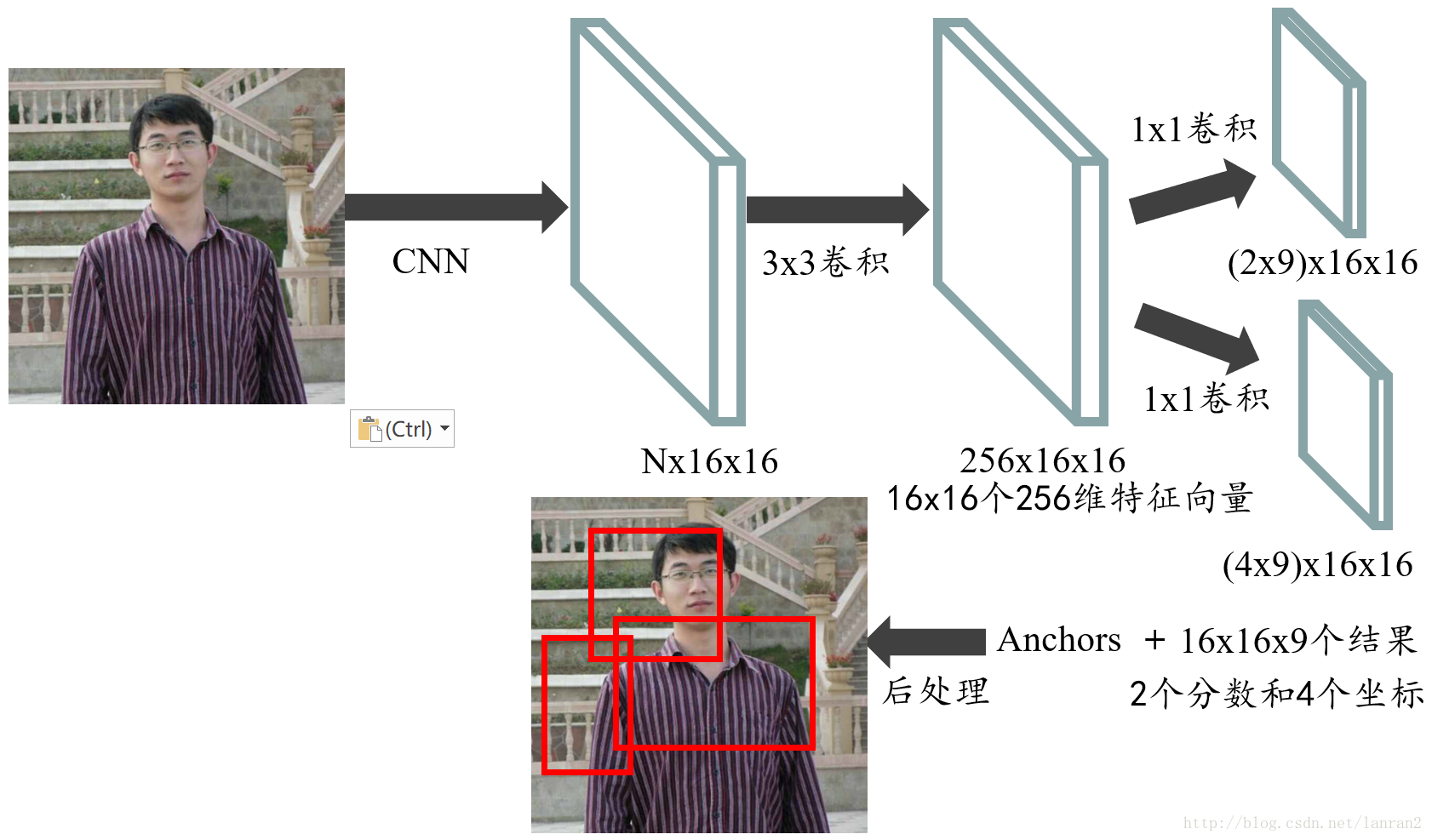
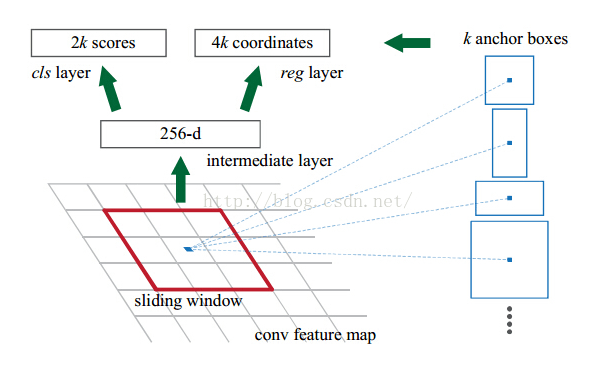
Feature Map进入RPN后,先经过一次33的卷积,同样,特征图大小依然是6040,数量512,这样做的目的应该是进一步集中特征信息,接着看到两个全卷积,即kernel_size=1*1,p=0,stride=1;
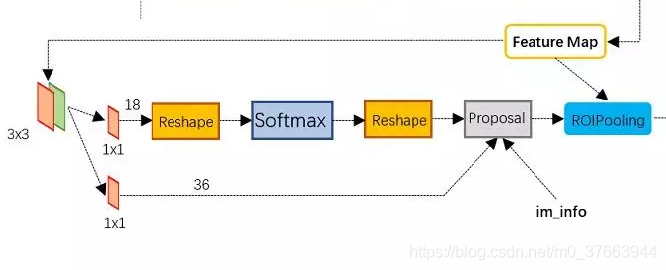
如上图中标识:
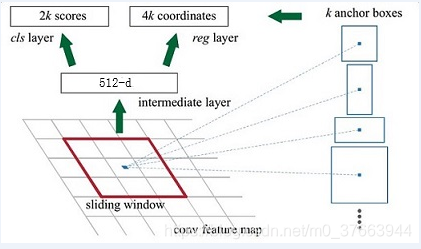
① rpn_cls:60*40*512-d ⊕ 1*1*512*18 ==> 60*40*9*2
逐像素对其9个Anchor box进行二分类
② rpn_bbox:60*40*512-d ⊕ 1*1*512*36==>60*40*9*4
逐像素得到其9个Anchor box四个坐标信息(其实是偏移量,后面介绍)
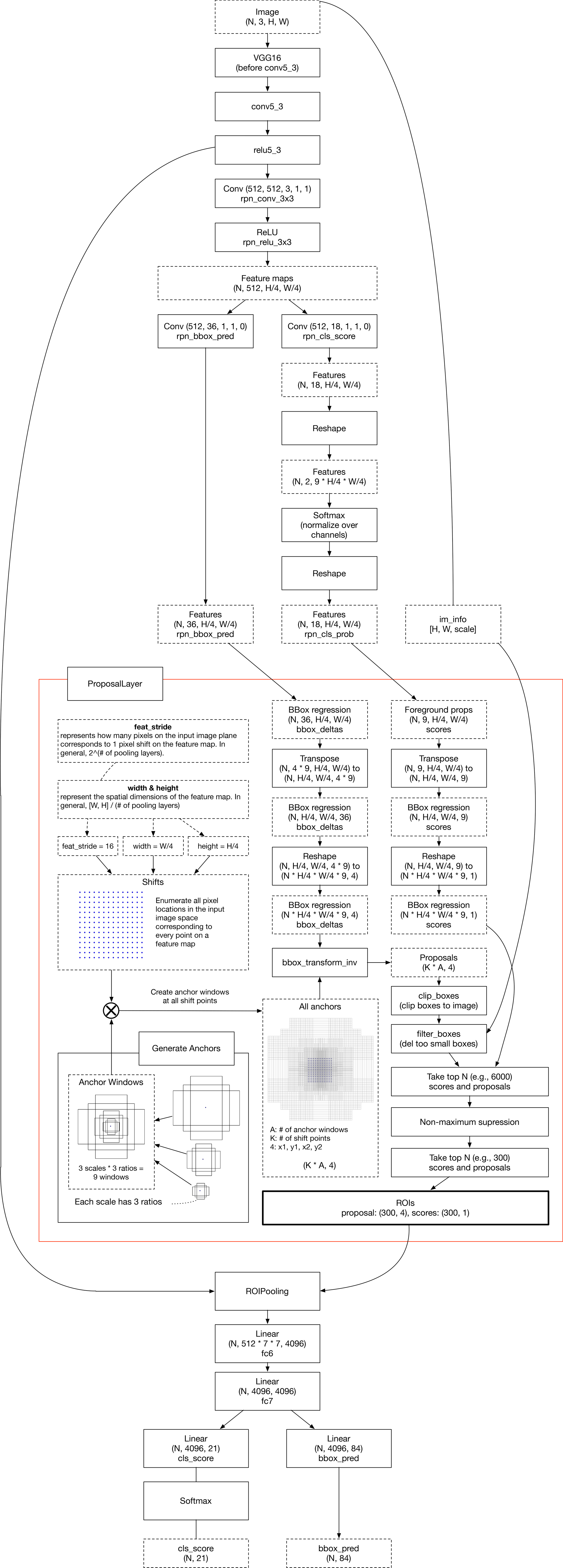
如下图所示:
代码解析
这段代码基本上就是第一张图,代码注意看注释:
def _region_proposal(self, net_conv, is_training, initializer):rpn = slim.conv2d(net_conv, cfg.RPN_CHANNELS, [3, 3], trainable=is_training, weights_initializer=initializer,scope="rpn_conv/3x3")#cfg.RPN_CHANNELS = 512, 3*3卷积处理,cfg.RPN_CHANNELS = 512,output shape=(1, 60, 40, 512)self._act_summaries.append(rpn)#可视化保存rpn_cls_score = slim.conv2d(rpn, self._num_anchors*2, [1, 1], trainable=is_training,weights_initializer=initializer,padding='VALID', activation_fn=None, scope='rpn_cls_score')#1*1卷积处理,分类,是否为前景,self._num_anchors=9,ouput shape=(1, 60, 40, 18)rpn_cls_score_reshape = _reshape_layer(self, rpn_cls_score, 2, 'rpn_cls_score_reshape')#后面需要进行softmax和argmax# change it so that the score has 2 as its channel size#shape=(1, 540, 40, 2),540=9*60#该函数后面有详细讲解rpn_cls_prob_reshape = _softmax_layer(self, rpn_cls_score_reshape, "rpn_cls_prob_reshape")#(1, 540, 40, 2)#该函数后面有详细讲解rpn_cls_pred = tf.argmax(tf.reshape(rpn_cls_score_reshape, [-1, 2]), axis=1, name="rpn_cls_pred")#tf.reshape=>shape=(21600, 2) output shape=(21600,)rpn_cls_prob = self._reshape_layer(rpn_cls_prob_reshape, self._num_anchors * 2, "rpn_cls_prob")#shape=(1, 60, 40, 18)#该函数后面有详细讲解rpn_bbox_pred = slim.conv2d(rpn, self._num_anchors * 4, [1, 1], trainable=is_training,weights_initializer=initializer,padding='VALID', activation_fn=None, scope='rpn_bbox_pred')# shape=(1, 60, 40, 36), 注意这里预测的不是 left, bottom, right, top而是anchor与真实框之间的误差值。if is_training:rois, roi_scores = self._proposal_layer(rpn_cls_prob, rpn_bbox_pred, "rois")#输出roi shape=(1*60*40*9,5)以及roi_scores shape=(1*60*40*9,1)#该函数后面有详细讲解rpn_labels = self._anchor_target_layer(rpn_cls_score, "anchor")#rpn_cls_score 在这个函数,只提取了它的H,W# Try to have a deterministic order for the computing graph, for reproducibility#这个函数主要生成标签#该函数后面有详细讲解with tf.control_dependencies([rpn_labels]):rois, _ = self._proposal_target_layer(rois, roi_scores, "rpn_rois")#该函数后面有详细讲解else:if cfg.TEST.MODE == 'nms':rois, _ = self._proposal_layer(rpn_cls_prob, rpn_bbox_pred, "rois")elif cfg.TEST.MODE == 'top':rois, _ = self._proposal_top_layer(rpn_cls_prob, rpn_bbox_pred, "rois")else:raise NotImplementedErrorself._predictions["rpn_cls_score"] = rpn_cls_scoreself._predictions["rpn_cls_score_reshape"] = rpn_cls_score_reshapeself._predictions["rpn_cls_prob"] = rpn_cls_probself._predictions["rpn_cls_pred"] = rpn_cls_predself._predictions["rpn_bbox_pred"] = rpn_bbox_predself._predictions["rois"] = roisreturn rois
以上代码得到了6个后续主要所需值:
1.rpn_cls_score:分类分数,shape=(1, 60, 40, 2*9)
2.rpn_cls_score_reshape:分类分数,shape=(1, 540, 40, 2)
3.rpn_cls_prob:分类分概率,shape=(1, 60, 40, 18)
4.rpn_cls_pred:分类预测,shape=(21600, 2)
5.rpn_bbox_pred:shape=(1, 60, 40, 36),输出框,输出形式为[ Δ x \Delta x Δx, Δ y \Delta y Δy, Δ w \Delta w Δw, Δ h \Delta h Δh],为误差值。误差值的计算方式:
anchor box: 中心点位置坐标 x a x_a xa, y a y_a ya和宽高 w a w_a wa, h a h_a ha
ground truth(真实框):标定的框也对应一个中心点位置坐标 x ∗ x^* x∗, y ∗ y^* y∗和宽高 w ∗ w^* w∗, h ∗ h^* h∗
所以,偏移量:
Δ x = ( x ∗ − x a ) / h a \Delta x=(x^*-x_a)/h_a Δx=(x∗−xa)/ha , Δ y = ( y ∗ − y a ) / h a \Delta y=(y^*-y_a)/h_a Δy=(y∗−ya)/ha
Δ w = l o g ( w ∗ / w a ) \Delta w=log(w^*/w_a) Δw=log(w∗/wa), Δ h = l o g ( h ∗ / h a ) \Delta h=log(h^*/h_a) Δh=log(h∗/ha)
6.rois:
深入代码解析
同时,这段代码有5个函数需要深入了解以下:
1._reshape_layer:改变输入层的shape
2._softmax_layer:进行softmax
3._proposal_layer:提取ROI
4._anchor_target_layer:打标签
5._proposal_target_layer:打标签
前两篇博客,将在本篇博客进行讲解,后三个点链接
1._reshape_layer
def _reshape_layer(self, bottom, num_dim, name):input_shape = tf.shape(bottom)with tf.variable_scope(name) as scope:# change the channel to the caffe format#之所以怎么做,是想把第3维度和第1维放在一起好做做个处理to_caffe = tf.transpose(bottom, [0, 3, 1, 2])# then force it to have channel 2#注意看tf.concat里面,num_dim为输入值,-1自己算reshaped = tf.reshape(to_caffe,tf.concat(axis=0, values=[[1, num_dim, -1], [input_shape[2]]]))# then swap the channel backto_tf = tf.transpose(reshaped, [0, 2, 3, 1])return to_tf#以下我们举个栗子:shape的前后变化(1, 60, 40, num_dim*9)=>(1, 60*9, 40, num_dim)
2._softmax_layer
def _softmax_layer(self, bottom, name):if name.startswith('rpn_cls_prob_reshape'):#rpn_cls_prob_reshape层进入if语句,因为需要变形,再softmaxinput_shape = tf.shape(bottom)bottom_reshaped = tf.reshape(bottom, [-1, input_shape[-1]])#(1, 540, 40, 2)=>(1*540*40, 2)reshaped_score = tf.nn.softmax(bottom_reshaped, name=name)return tf.reshape(reshaped_score, input_shape)return tf.nn.softmax(bottom, name=name)
其实就是简单的softmax语句其中有一个if语句
3._proposal_layer
主要进行了box的修正(通过我们预测的误差值),nms的筛选和超出原图的裁剪。详细见:
https://blog.csdn.net/m0_37663944/article/details/103728902
4._anchor_target_layer
主要根据真实框与anchor的iou值进行了筛选,打标签(分类0,1,然后得出回归预测的误差值等)。这一部分得出的值是用来训练的,训练RPN(也就是得到roi的网络)
https://blog.csdn.net/m0_37663944/article/details/103735094
5._proposal_target_layer
https://blog.csdn.net/m0_37663944/article/details/103737373
这个函数主要根据_proposal_layer函数得到的roi与真实框得到iou,进行筛选,打标签(分类0,1,然后得出回归预测的误差值),和上面的_anchor_target_layer有以下不同:
1.它是用来训练最终的分类回归的,不在本篇博客的图中。
参考文献:
https://www.cnblogs.com/wangyong/p/8513563.html
https://blog.csdn.net/qq_41576083/article/details/82966489