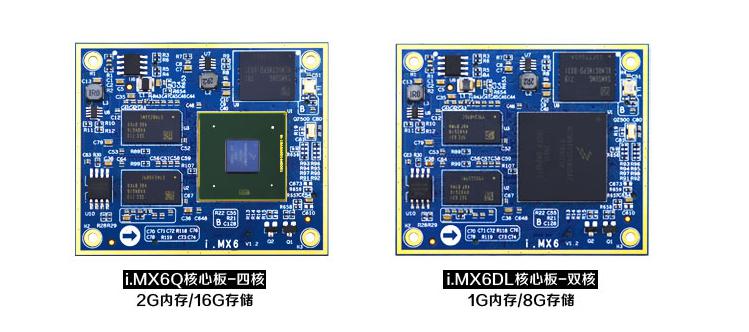
迅为IMX6Q核心板工业级/Plus版本
IMX6Q处理器:兼容单核,双核,工业级,汽车级,IMX6Q最新Plus版本,共用同一底板,高端产品无忧。
i.MX6系列针对消费电子、工业控制和汽车应用领域,它将ARM Cortex-A9架构的高功效处理功能,与最前沿的2D和3D图形及高分辨率视频相结合,使多媒体性能提升到了新的高度,能够支持前所未有的新一代用户体验。

连接方式:板对板连接器
工业级的板对板连接器,高可靠,做工精良,可满足高速信号环境下使用,优于其他类型连接器。

从上图可以看出,该种封装可以拔插,方便生产和维修更换。而且该封装由于引脚密度高,在很小的尺寸内即可引出较多引脚,所以该类型封装的核心板体积小巧。方便嵌入到产品尺寸受限的产品中,
核心板参数
尺寸 | 51mm*61mm |
IMX6Q核心板-四核商业级 | NXP 四核 i.MX6Q,主频 1 GHz 内存:2GB DDR3;存储:16GB EMMC;SATA接口:支持 |
IMX6DL核心板-双核商业级 | NXP 双核精简版 i.MX6DL,主频 1GHz 内存:1GB DDR3;存储:8GB EMMC;SATA接口:不支持 |
IMX6Q核心板-四核工业级 | NXP 四核 i.MX6Q,主频 800MHz 内存:1GB DDR3;存储:8GB EMMC;SATA接口:支持 |
EEPROM | 4MB的EEPROM用来存储关键数据 |
电源管理 | 内部独立 |
工作电压 | 5V |
系统支持 | Android4.4.2、Linux3.0.35、QT4.7/5.7、Ubuntu12.04系统 |
商业级运行温度 | -20℃到+80 ℃ |
工业级运行温度 | -40℃到+85 ℃ |
引角扩展 | 引出脚多达320个,满足用户各类扩展需求 |
扩展参数 | 千兆以太网:1路自适应千兆以太网 EIM通用总线: 32位数据线全引出 SDIO:3路 JTAG:1路引出 SATA:1路 CAMARA:DVP和MIPI接口全引出 LCD:双路LVDS和24位RGB接口 HDMI:1路V1.4 GPIO:引出 矩阵键盘:引出 PWM:3路 I2C:3路 声卡IIS:1路 CAN:2路 USB:HOST+OTG UART:5路 pcie:1路 |
详细点击了解:http://www.topeetboard.com