浙江大学计算机学院的复试终于结束了。
总的来说,这一场复试很有水平的复试。面试老师们都很认真负责,在谈话中给人一种平易近人的感觉。整个复试过程充满包容性和公平性,没有明显的对于跨专业考生的歧视。
虽然,这和博主并没有关系。
因为,博主连初试都没过。
(ಥ _ ಥ)
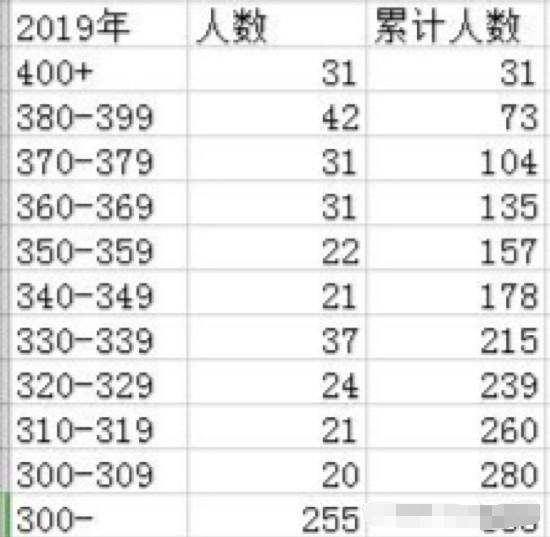
博主的初试成绩是:359,政治:62,英语:56,数学:137,专业课:104
身为网络工程师的博主,身为PAT满分的博主,身为计算机四级的博主,身为获得了软件学院offer的博主,这样的分数确实对身为kircher的博主造成了很大的冲击。
博主认为,自己的考试复习充满了功利性。
因为英语的分数相对数学比较少,博主就很少关注它。博主虽然在考前就感觉到自己的英语水平可能会影响最后的成绩,也给予了它一定的关注,却没有想到它的影响力居然会达到这种地步。
因为计算机网络在专业课中占比较低,博主花费的时间和精力都比较少,以至于后来考试中物理层传输介质的题都会做错。博主一度认为物理层传输介质的题不会考到,便没有看过这一知识点。这显然是身为网络工程师的博主对自己的一种否定。
kircher有着考上计算机学院的愿望,所以他选择了性价比最高的方法,试图用最少的时间换来最大的收益。这和博主之前的学习方式具有很大的不同。博主之前是为了自己的兴趣而学习,而不是为了考试的目标。kircher也在备考过程中逐渐认识到这一点,他后期一直在自我否定和自我肯定的矛盾中挣扎。
博主在备考期间也认识了许多新的朋友(当然也包括阅读这段文字的各位)。他们有的实现了自己的愿望,找到了自己的价值;有的像kircher一样,在思考着以后的规划。无论他们的结果怎样,他们都给了博主很多的启发和帮助。希望他们都能够找到属于自己的道路。
博主也只能写这么多了。至于以后还考不考研?什么时候考研?用什么方式考研?这些问题可能需要下一阶段的博主来决定了。博主还有其它属于自己的愿望。至于那些事情,有兴趣的人也可以去bilibili上找到博主,博主一直都是Kircher。https://space.bilibili.com/13607296
引用一下最近学的的李佳老师的书的序言:

博主期待着下一次kircher和各位的相遇。