浙江大学属于34所自划线院校之一,考研复试分数线分国家线和院校自划线,院校自划线公布时间一般早于国家线,报考浙江大学计算机研究生的考生,复试分数线请以院校官网公布的分数线为准!
2021年浙江大学计算机考研复试分数线公布日期在3月15日,预计2022年计算机考研复试分数线公布时间也在3月中旬。
2022浙江大学计算机考研复试分数线查询入口>>点击进入
2022浙江大学计算机考研复试分数线怎么看?
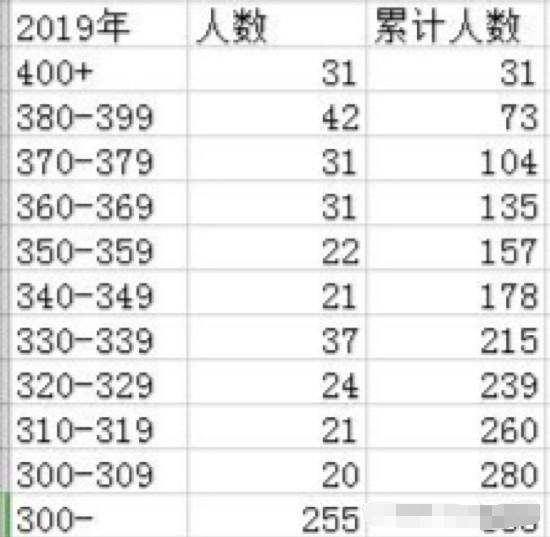
2022年浙江大学计算机考研复试分数线暂时还未出来,考生可以参考2021年浙江大学计算机考研复试分数线,如下所示:

从以上图表我们可以看到理学的考研复试分数线总分是320分,这个分数线也就是2021年浙江大学计算机考研复试分数线,看到这里很多考生开始困惑了,计算机考研属于理学学科吗?
查询报考专业属于哪个类别的方法是:
第一步:搜索“中国研究生招生信息网![]() https://yz.chsi.com.cn/”,点击导航下的专业库
https://yz.chsi.com.cn/”,点击导航下的专业库
第二步:在专业库中搜索“计算机”会看到很多计算机相关专业,点击专业右侧的【专业主页】即可看到详情类别
第三步:以计算机科学与技术专业为例,专业代码077500,门类属于理学

之后我们可以通过“浙江大学2022 年 硕 士 研 究 生 招 生 专 业 目 录 查 询 系 ”可看到计算机考研专业是【计算机科学与技术】,因而在查询2022年浙江大学考研复试分数线的时候,请以学硕考研复试分数线中的理学分数线为准!
2022年浙江大学计算机考研复试要求是什么呢?
我校原则上学术学位类按学科门类分别划线,专业学位类按专业学位类别分别划线。各学院(系)根据各招生专业计划、考生考试成绩和差额复试比例,在学校基本分数线上确定各专业的复试分数线,并以此确定入围复试的考生名单。复试形式和内容由各学院(系)根据专业要求、相关知识及能力考核标准确定,并在复试前通过各学院(系)网站向考生公布。
外语听力和口语测试在复试中进行。