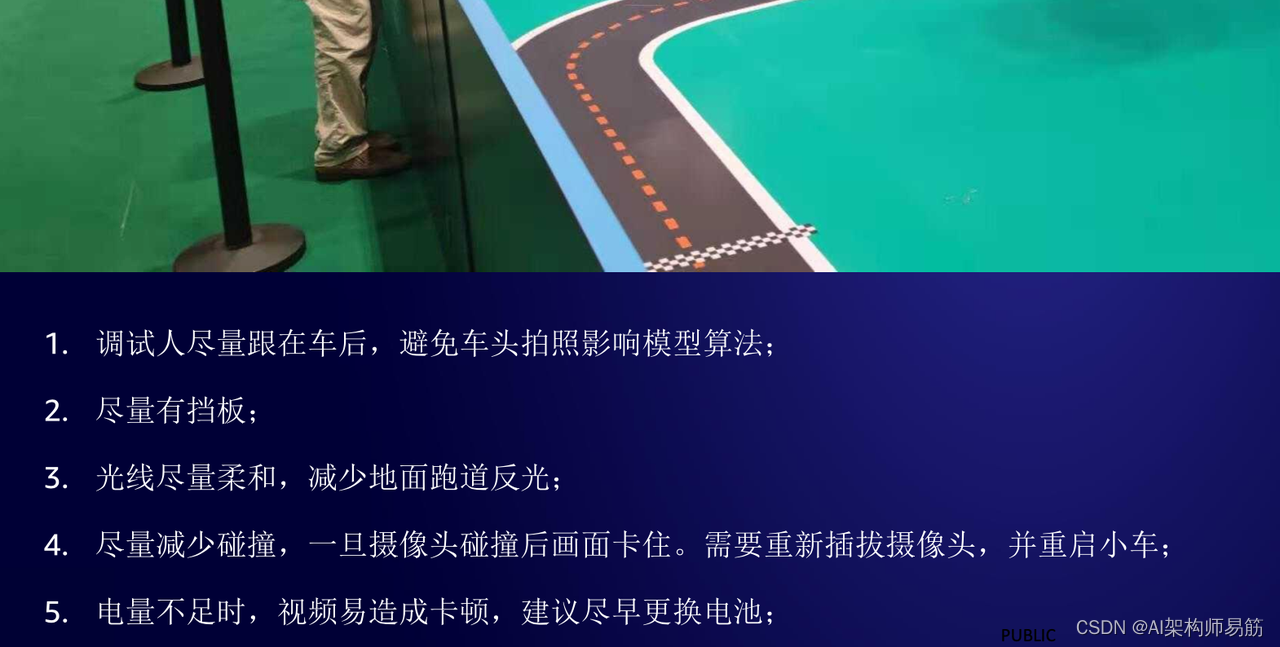
先看笔者团队线下的DeepRacer Model测试动图gif。
1. 线下比赛策略:
- 激进:waypoint 还是有点激进,感觉跟速度没多大关系。
- 稳妥:不用waypoint,中线。默认的中线算法,1m/s~2.8m/s, 模拟器可以抛出10m/s 的速度。
参考 https://www.linkedin.com/pulse/aws-deepracer-my-journey-from-17-seconds-95-dante-chen?trk=pulse-article_more-articles_related-content-card
注意点
https://aws.amazon.com/cn/blogs/china/practical-application-analysis-of-amazon-deepracer-multiple-strategy-models/
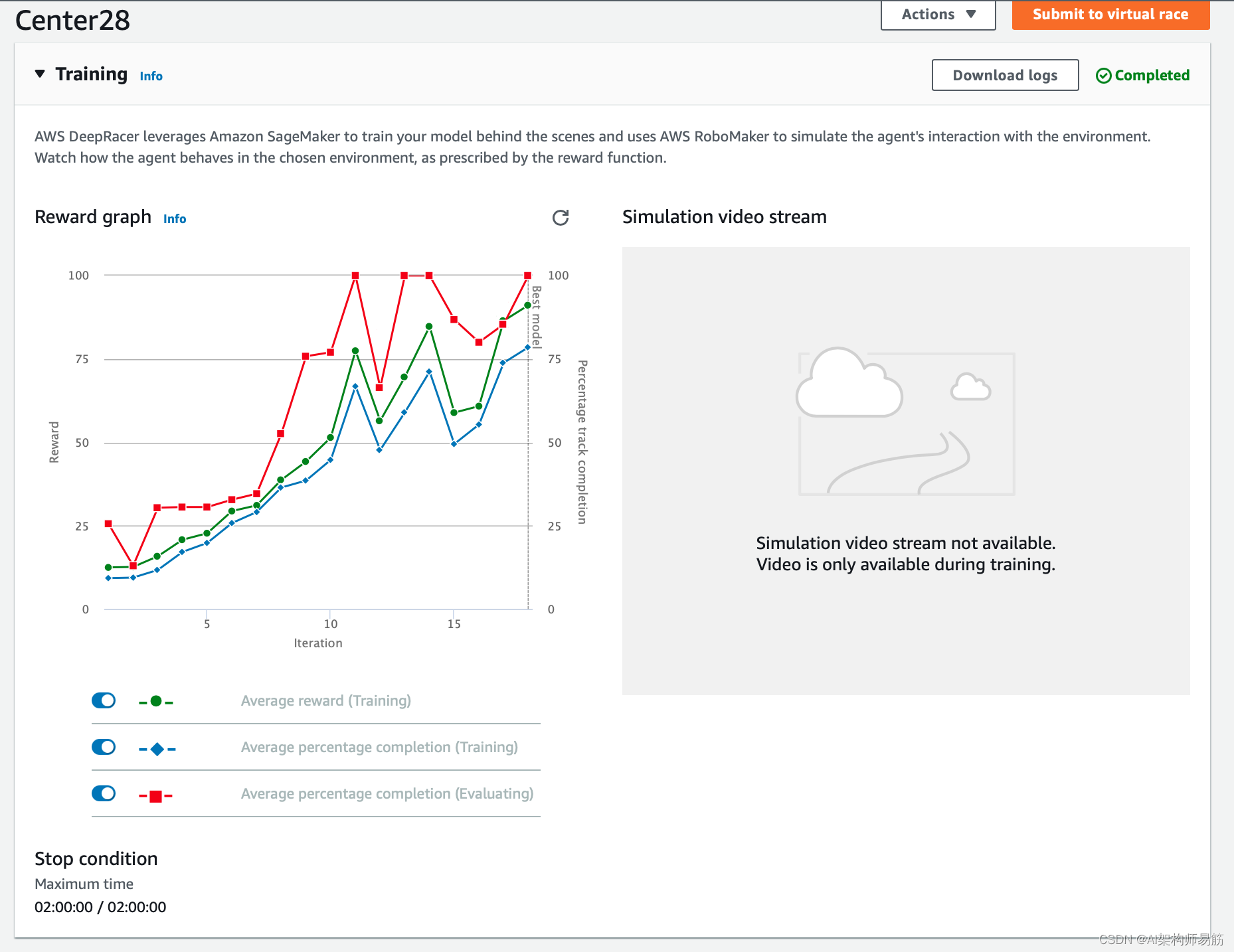
训练的模型过拟合了,因为我们选取的是一个已经训练了 12h 的模型,在完整跑完测试赛道之后还进行了很多轮训练。过拟合很可能是大多数队伍最终线下效果不及预期的一个最重要原因,后面我们还将花一些篇幅介绍我们对过拟合问题的理解。
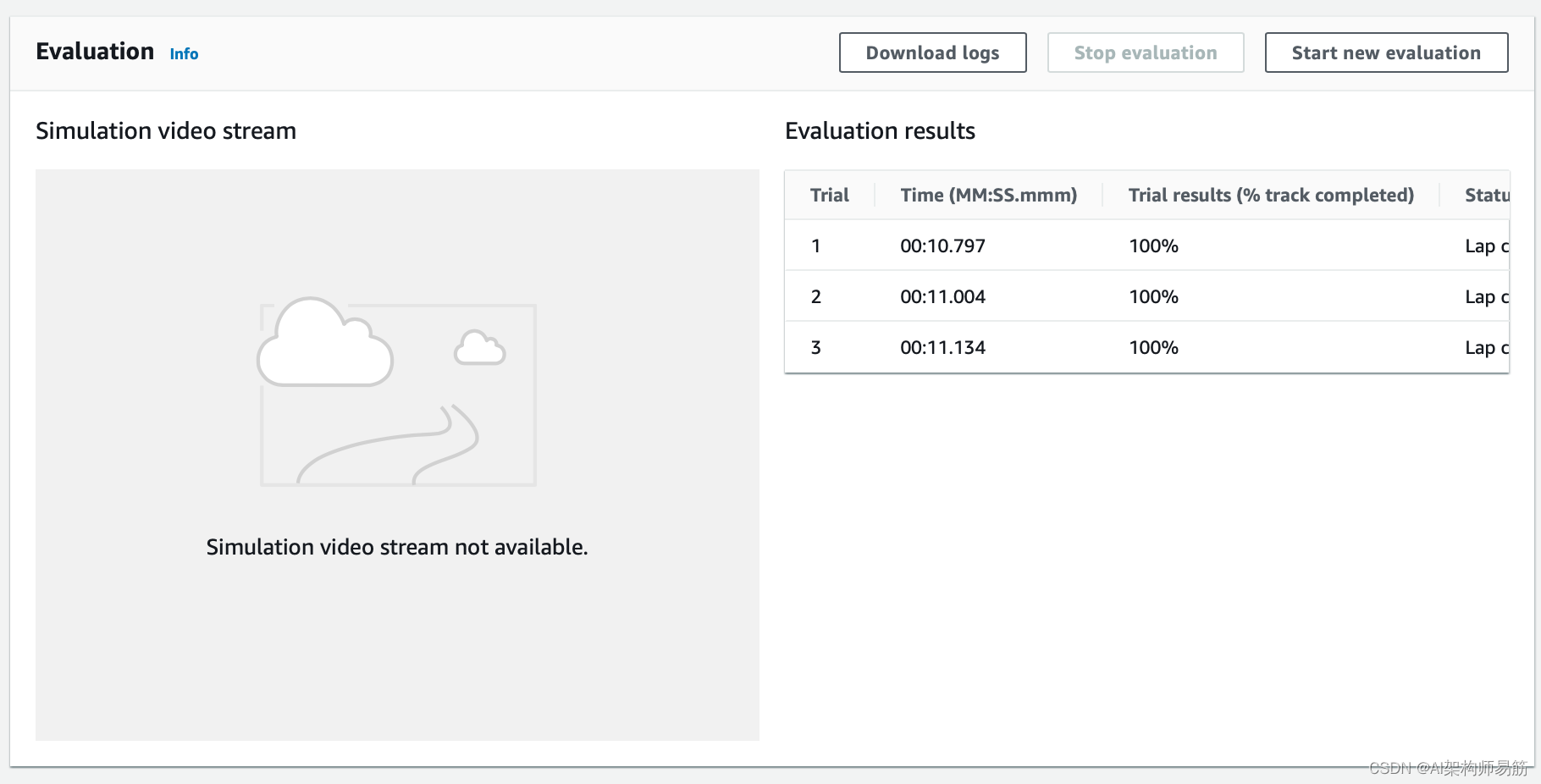
2. 中线算法2个小时model,跑进10s一圈
Model 在模拟器上要求完成率要超过95%以上,才有可能完成物理赛道。
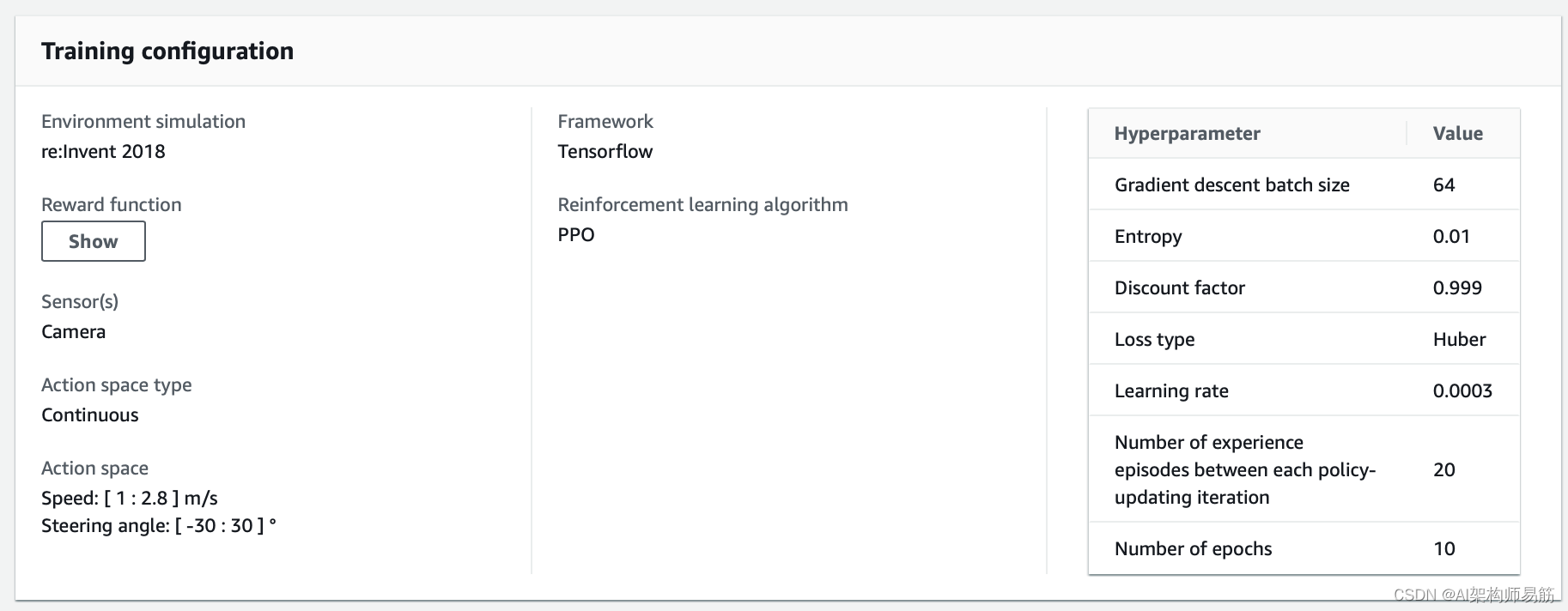
Reward function
def reward_function(params):'''Example of rewarding the agent to follow center line'''# Read input parameterstrack_width = params['track_width']distance_from_center = params['distance_from_center']# Calculate 3 markers that are at varying distances away from the center linemarker_1 = 0.1 * track_widthmarker_2 = 0.25 * track_widthmarker_3 = 0.5 * track_width# Give higher reward if the car is closer to center line and vice versaif distance_from_center <= marker_1:reward = 1.0elif distance_from_center <= marker_2:reward = 0.5elif distance_from_center <= marker_3:reward = 0.1else:reward = 1e-3 # likely crashed/ close to off trackreturn float(reward)
3. Mac Number 或者 Excel 日志分析
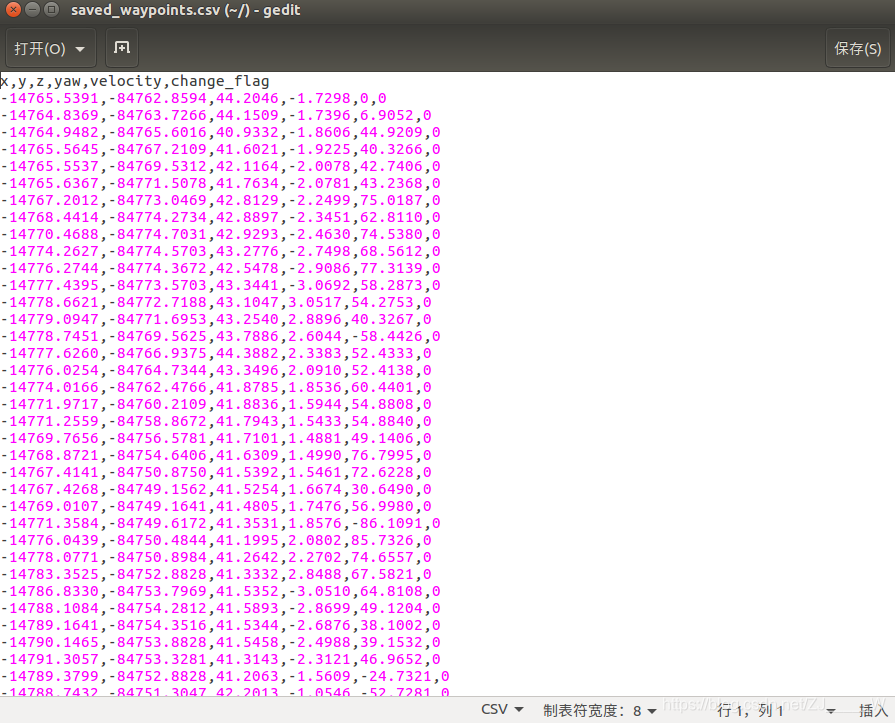
Evaluation > Download logs
Logs > sim-trace > evaluation > evaluation-simtrace > 0-iteration.csv

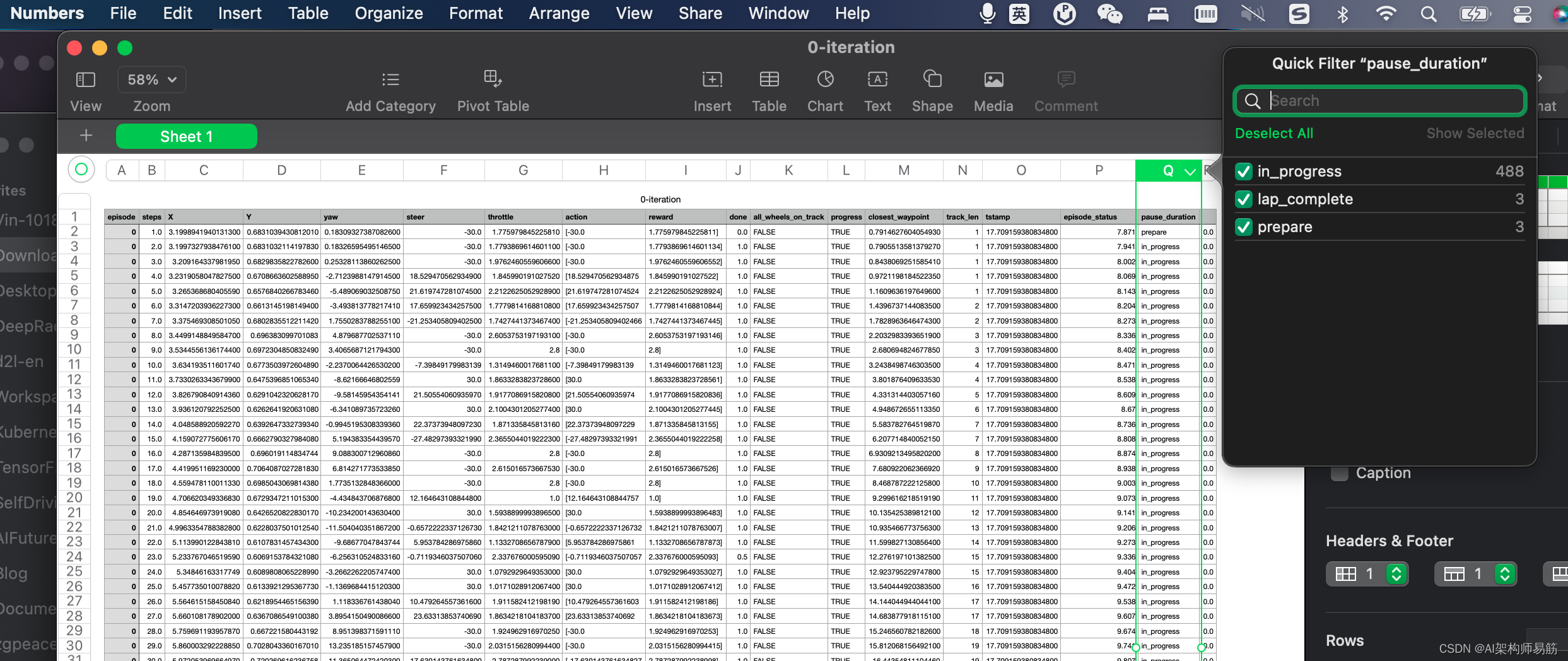
3.1 查看是否有出界的点, 类 pause_duration:
点击类 Quick Filter > 看到只有 in_progress, lap_complete, prepare.
没有out_track 说明Model还比较稳定。
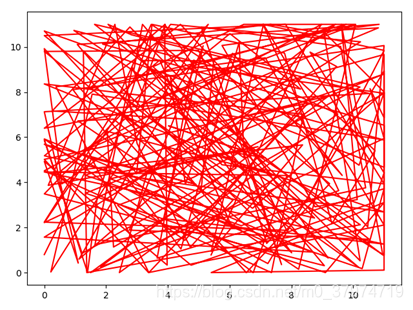
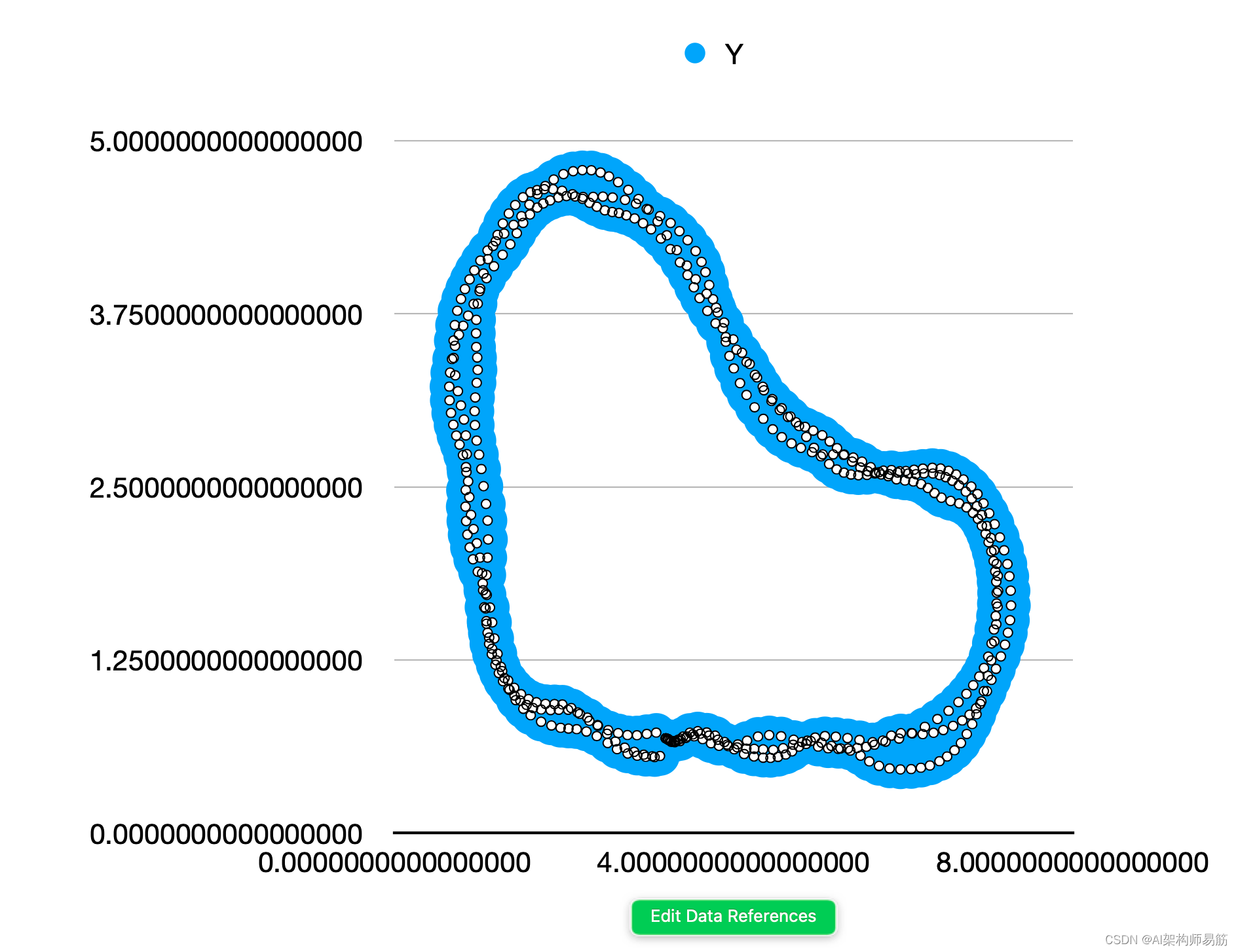
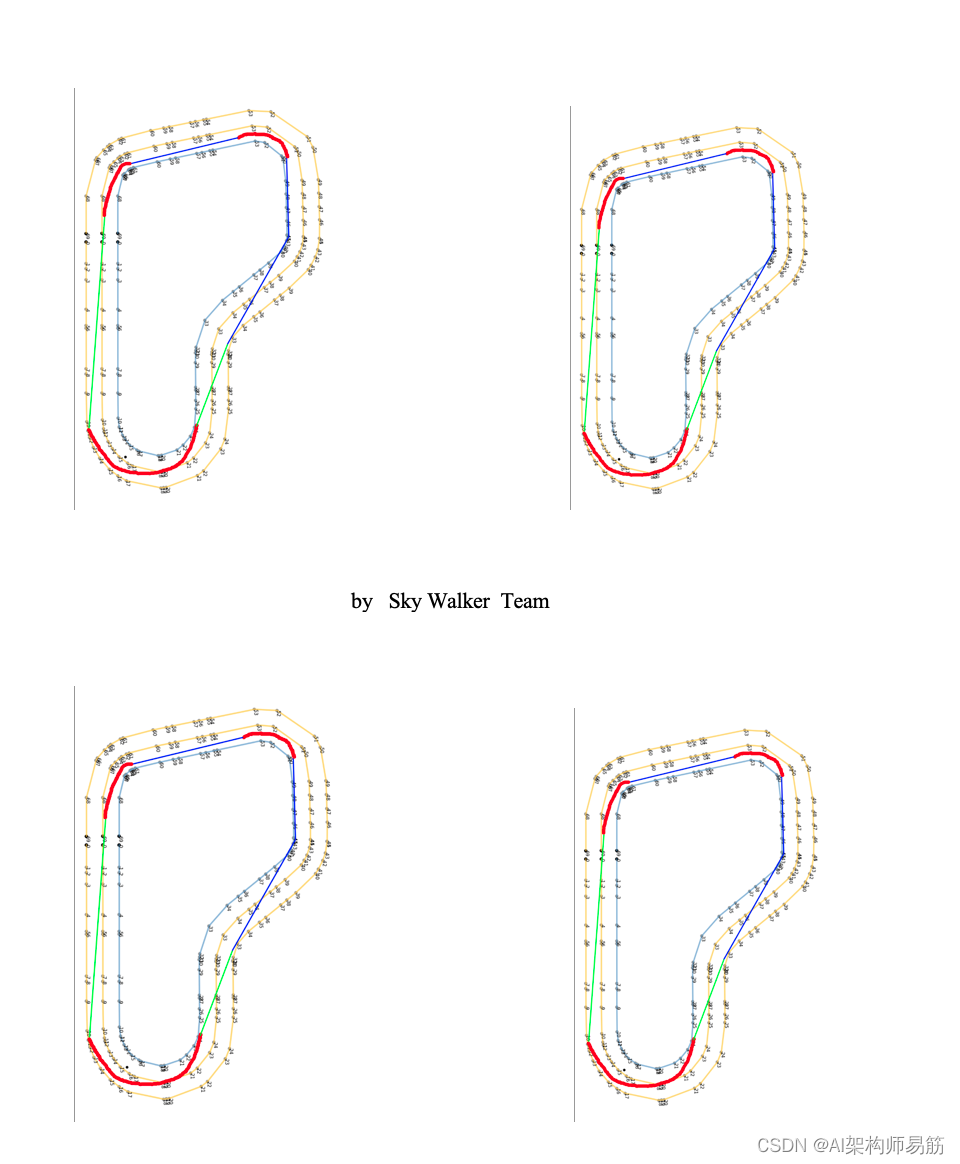
3.2 画出轨迹图
选择 X, Y 两列 > Chart > 点状图
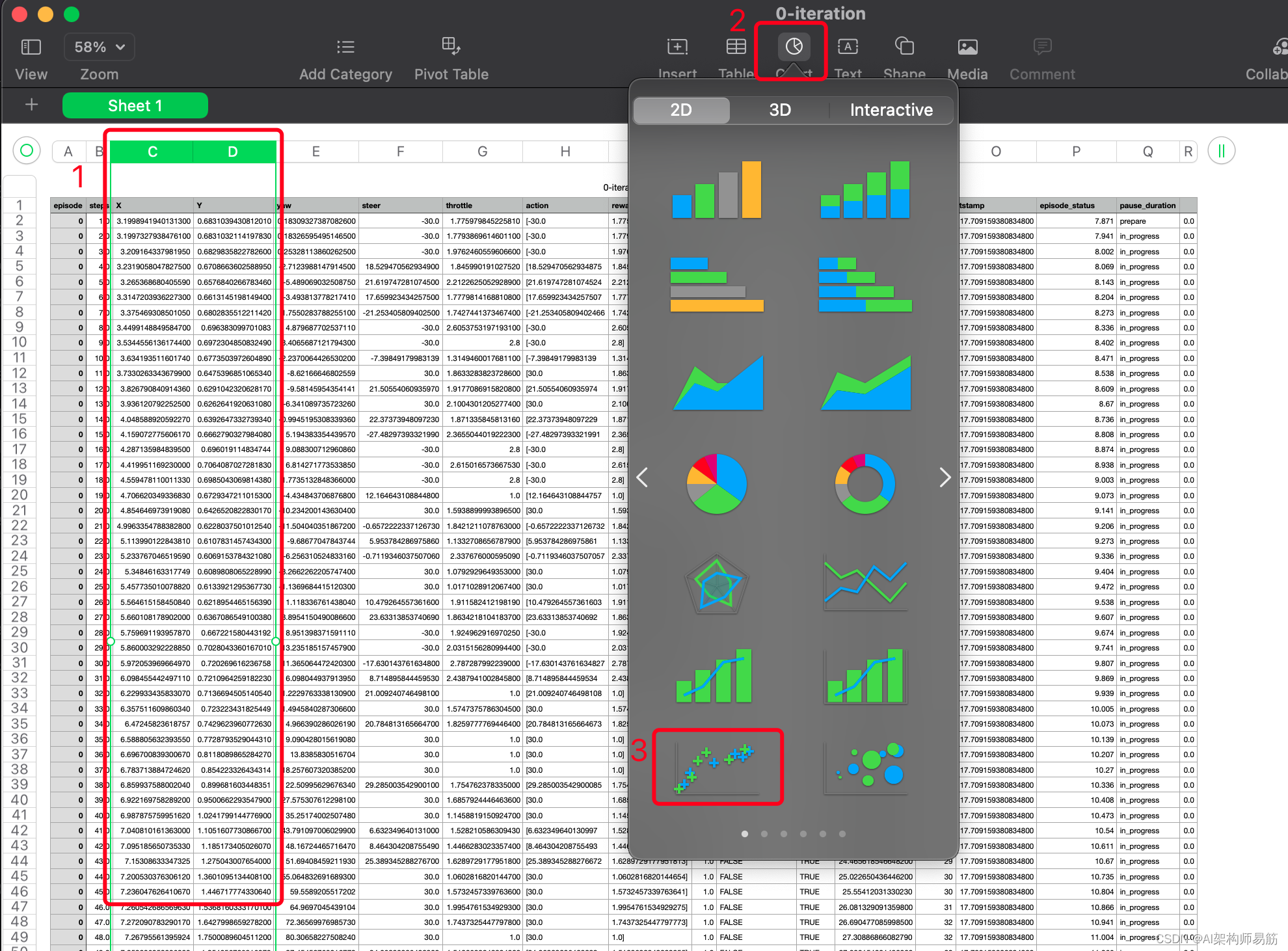
放大,点击轨道,就会出现小车跑的轨迹图
4. 总结以及小工具
比赛前打印了比赛的轨道图,方便比赛记录。
4.1 角色分配
深色着装:不要穿白色或者浅色的衣服,如果可以纯黑色上衣、裤子,鞋子,袜子。
调试车的注意:
- 基准角度默认在0°即可,可以用以前能跑的Model,验证小车是否调整好了,角度在+30°和-30°附近¬¬。
- 速度调整到dangerous附近。
- 确认电池是满的,电池不够Model跑不好。
角色1 – 拿本子记录员和策略顾问:
- 记录车的速度,角度,配置页面拍照即可。以防重置车,需要重新设置
- 帮忙记录每个Model的最佳速度,多少秒一圈。出界的位置,明天我打印10份地图轨迹,可以提前减速。
角色2 – F1 赛车手:
- 纯黑色衣服、裤子、袜子(建议脱鞋)。
- 跟着在车后面走,如果出界,第一时间搬到起跑线。
角色3 –电脑 操盘手:
- 指针放在停止车的附近,眼睛盯着小车,一出线就停止。
- 拿着角色2记录的出现位置,提前1米左右减速。
- 过了小弯以后加速,匀速加速一圈1~2个点。最后直线加速加满
角色4 – 视频录制:
如果成绩有异议,可以拿视频申诉。
4.2 赛后review
真车比赛,必须要有车调试才能知道Model如何,否则就开盲盒,结果就不可控。
Re-Invent 2018的赛道,比赛第一名在7s左右一圈,所以知道大概时间,就可以定目标了。
最后送给参加比赛的队友。
“取乎其上,得乎其中;取乎其中,得乎其下;取乎其下,则无所得矣。”
意思就是说,如果一开始的期望是一流,最后达到的效果可能只是中流;如果一开始期望的只是中流,最后达到的效果只能是末流;如果期望只是末流,最后可能什么都得不到。一句话:想要最好的得到一般的,想要一般的得到不好的。