正文
1. WayPoint寻路
下图是一个典型的路点寻路
 - 竹石 - 游戏...")
另一种方法是使用多边形来记录路径信息,它可以提供更多的信息给ai角色使用。下图就是一个navigation mesh。
 - 竹石 - 游戏...")
以下列出几个WayPoint的不足之处:
- 一些复杂的游戏地图需要的WayPoint数量过于庞大
- 有时会使角色走“Z”型路径
如下图A点和B点之间的路径
 - 竹石 - 游戏...")
NAV寻路如下图
 - 竹石 - 游戏...")
下图是路点寻路,如黄线,会产生“Z”字形
 - 竹石 - 游戏...")
下图为文章开始时展示的地图的比较,红线是wayPoint寻路,蓝线是nav。
 - 竹石 - 游戏...")
3. 不能进行动态修正,如果地图中有动态障碍,处理起来会很困难
如要实现即时战略游戏中,一辆在路上行走的坦克会挡住你军队的去路,这个移动的坦克就是一个动态障碍。
4. 不能根据角色的特性(不同宽度、高度等)改变路径
如一个狭窄的通道,普通的人能够通过,而一辆马车的宽度超过通道宽度,应该不能通过。
5. 不能保存地形的附加信息,如地表高度、地面特征(水面、沙地等)
比如一个游戏中的角色在走到沙地上时会降低移动速度,或走在一个斜坡上时人物会发生倾斜等。
2. NavMesh寻路:
nav寻路一般包含两部分,首先是使用工具根据地图信息生成寻路用的nav mesh,接下来就是在游戏中根据生成的nav mesh来自动寻路。
一般人首先关心的就是寻路方法,所以这里把顺序颠倒下,先说寻路。
一. 使用A*寻找所经过网格路径
下图为一个已经生成nav网格的地图,深红色区域为不可行走区域,浅红色区域为可以行走的区域。
 -- 寻路方法 - 竹石 - 游戏...")
如下图,现在如果要寻找从A点到B点的路径,首先要从所有可行走的网格中找到一条最优的网格路径(图中紫色的网格),然后再根据这些网格生成所需要的路径点。
计算最优网格路径的方法可以使用流行的A*,也可以使用其它方法。A*算法网上很多就不说了,至于三角网格的A*实现因为涉及网格的数据结构会在系列的最后给出。
 -- 寻路方法 - 竹石 - 游戏...")
二. 生成路径点
nav寻路最常用的就是光照射线法 了,这个在neoragex2002的blog上有讲,这里就不说了
http://www.cnblogs.com/neoragex2002/archive/2007/09/09/887556.html
另一种方法就是拐角点法 ,如下图
下图的5个凸多边形是已经生成的导航网格,多边形外部的区域为不可行走区域,current为起点,goal为终点,从图中就可以看出最短路径为图中红线,蓝色圈出的点为我们需要找出的点。所有多边形顶点均按逆时针方向存储(这些均在生成导航网格时处理,以后会讲到)。
 -- 使用A*寻路 - 竹石 - 游戏...")
(1)下图显示出各区域之间的入口,即多边形的临边。由图中可以看出每个临边均为起点穿出该多边形区域的边,故以下称该边为穿出边。
 -- 使用A*寻路 - 竹石 - 游戏...")
(2)首先找到起始点所在的多边形和穿出边的两个端点,由起点连接两个端点,形成两个线段lineLeft 和lineRight。如下图。绿色圈表示左点,红色表示右点(左点、右点是根据多边形顶点保存顺序而来)。
 -- 使用A*寻路 - 竹石 - 游戏...")
(3)继续找到下一个穿出边的两个端点,判断新的左点是否在lineLeft 和lineRigh之间,如果在,则更新lineLeft为起点到新左点的线段。
 -- 使用A*寻路 - 竹石 - 游戏...")
同样处理新穿出边的右点,如下图
 -- 使用A*寻路 - 竹石 - 游戏...")
该步最后得到两个新的线段,如下图。
 -- 使用A*寻路 - 竹石 - 游戏...")
(4) 继续判断下一个穿出边的两个端点,如下图,新的左点在lineLeft和lineRight的外面,则不更新线段。
 -- 使用A*寻路 - 竹石 - 游戏...")
下图说明新的右点在两条直线之间,更新lineRight。
 -- 使用A*寻路 - 竹石 - 游戏...")
该步最后得到两个新的线段,如下图。
 -- 使用A*寻路 - 竹石 - 游戏...")
(5) 继续循环判断下一个穿出边的两个端点,该穿出边的两个端点都 在lineRight的右侧,表示lineRight的终点 即为路径的一个拐角点 。
 -- 使用A*寻路 - 竹石 - 游戏...")
(6) 循环以上步骤都可以找到从起点到终点的一条完整路径。
在继续下面的nav网格生成算法之前,先介绍一下涉及到的计算几何知识。这里只罗列出结论,要详细了解参考相关书籍。
- 矢量加减法:
设二维矢量P = ( x1, y1 ),Q = ( x2 , y2 ),则矢量加法定义为: P + Q = ( x1 + x2 , y1 + y2 ),同样的,矢量减法定义为: P - Q = ( x1 - x2 , y1 - y2 )。显然有性质 P + Q = Q + P,P - Q = - ( Q - P )。 - 矢量叉积
设矢量P = ( x1, y1 ),Q = ( x2, y2 ),则矢量叉积定义为由(0,0)、p1、p2所组成的平行四边形的带符号的面积,即:P × Q 的标量大小 = x1*y2 - x2*y1,其结果是一个矢量。 - 折线段的拐向判断:
折线段的拐向判断方法可以直接由矢量叉积的性质推出。对于有公共端点的线段p0p1和p1p2,通过计算(p2 - p0) × (p1 - p0)的符号便可以确定折线段的拐向:
若(p2 - p0) × (p1 - p0) > 0,则p0p1在p1点拐向右侧后得到p1p2。
若(p2 - p0) × (p1 - p0) < 0,则p0p1在p1点拐向左侧后得到p1p2。
若(p2 - p0) × (p1 - p0) = 0,则p0、p1、p2三点共线。 - 判断两线段是否相交:
我们分两步确定两条线段是否相交:
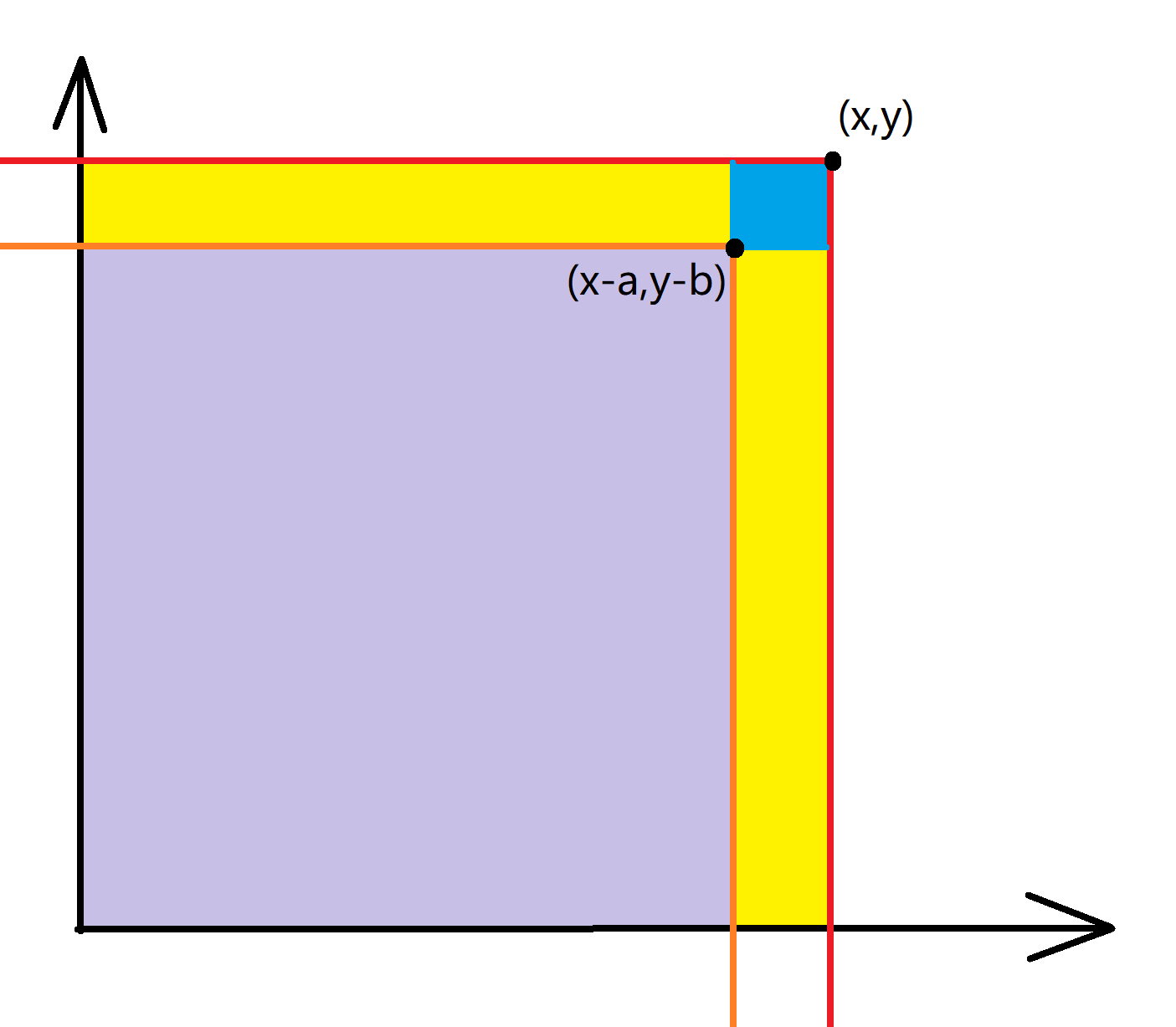
(1)快速排斥试验
设以线段 P1P2 为对角线的矩形为R, 设以线段 Q1Q2 为对角线的矩形为T,如果R和T不相交,显然两线段不会相交。
(2)跨立试验
如果两线段相交,则两线段必然相互跨立对方。若P1P2跨立Q1Q2 ,则矢量 ( P1 - Q1 ) 和( P2 - Q1 )位于矢量( Q2 - Q1 ) 的两侧,即( P1 - Q1 ) × ( Q2 - Q1 ) * ( P2 - Q1 ) × ( Q2 - Q1 ) < 0。上式可改写成( P1 - Q1 ) × ( Q2 - Q1 ) * ( Q2 - Q1 ) × ( P2 - Q1 ) > 0。当 ( P1 - Q1 ) × ( Q2 - Q1 ) = 0 时,说明 ( P1 - Q1 ) 和 ( Q2 - Q1 )共线,但是因为已经通过快速排斥试验,所以 P1 一定在线段 Q1Q2上;同理,( Q2 - Q1 ) ×(P2 - Q1 ) = 0 说明 P2 一定在线段 Q1Q2上。所以判断P1P2跨立Q1Q2的依据是:( P1 - Q1 ) × ( Q2 - Q1 ) * ( Q2 - Q1 ) × ( P2 - Q1 ) >= 0。同理判断Q1Q2跨立P1P2的依据是:( Q1 - P1 ) × ( P2 - P1 ) * ( P2 - P1 ) × ( Q2 - P1 ) >= 0。
 -- 一些必要的计算几何知识 - 竹石 - 游戏...")
- 凸多边形
假设我们在一个多边形上(包括多边形的边界及边界围封的范围)任意取两点并以一条线段连结该两点,如果线段上的每一点均在该多边形上,那么我们便说这个多边形是凸的。 - 凸包
给定平面上的一个(有限)点集(即一组点),这个点集的凸包就是包含点集中所有点的最小面积的凸多边形。
 -- 一些必要的计算几何知识 - 竹石 - 游戏...")
- 点在凸多边形中的判断
假设多边形是凸的,而且顶点p0,p1,...,pn按顺时针方向排列,则点在多边形任意一边 pi-1, pi 的右面。 - Voronoi图及对偶图
 -- 一些必要的计算几何知识 - 竹石 - 游戏...")
- Delaunay三角剖分(Voronoi对偶图)
 -- 一些必要的计算几何知识 - 竹石 - 游戏...")
在实际中运用的最多的三角剖分是Delaunay三角剖分,它是一种特殊的三角剖分。先从Delaunay边说起:
【定义】Delaunay边:假设E中的一条边e(两个端点为a,b),e若满足下列条件,则称之为Delaunay边:存在一个圆经过a,b两点,圆内(注意是圆内,圆上最多三点共圆)不含点集V中任何其他的点,这一特性又称空圆特性。
【定义】Delaunay三角剖分:如果点集V的一个三角剖分T只包含Delaunay边,那么该三角剖分称为Delaunay三角剖分。
以下是Delaunay剖分所具备的优异特性:
1.最接近:以最近临的三点形成三角形,且各线段(三角形的边)皆不相交。
2.唯一性:不论从区域何处开始构建,最终都将得到一致的结果。
3.最优性:任意两个相邻三角形形成的凸四边形的对角线如果可以互换的话,那么两个三角形六个内角中最小的角度不会变大。
4.最规则:如果将三角网中的每个三角形的最小角进行升序排列,则Delaunay三角网的排列得到的数值最大。
5.区域性:新增、删除、移动某一个顶点时只会影响临近的三角形。
6.具有凸多边形的外壳:三角网最外层的边界形成一个凸多边形的外壳。 - 多边形裁剪
 -- 一些必要的计算几何知识 - 竹石 - 游戏...")
Weiler-Athenton算法
–主多边形:被裁剪多边形,记为A
–裁剪多边形:裁剪窗口,记为B
多边形顶点的排列顺序(使多边形区域位于有向边的左侧 )外环:逆时针 ;内环:顺时针
主多边形和裁剪多边形把二维平面分成两部分。
内裁剪:A∩B
外裁剪:A-B
 -- 一些必要的计算几何知识 - 竹石 - 游戏...")
裁剪结果区域的边界由A的部分边界和B的部分边界两部分构成,并且在交点处边界发生交替,即由A的边界转至B的边界,或由B的边界转至A的边界。
如果主多边形与裁剪多边形有交点,则交点成对出现,它们被分为如下两类:
进点 :主多边形边界由此进入裁剪多边形内 如,I1,I3, I5, I7, I9, I11
出点 :主多边形边界由此离开裁剪多边形区域. 如, I0,I2, I4, I6, I8, I10
 -- 一些必要的计算几何知识 - 竹石 - 游戏...")
算法步骤
(1)建立空的裁剪结果多边形的顶点表.
(2)选取任一没有被跟踪过的交点为始点,将其输出到结果多边形顶点表中.
(3)如果该交点为进点,跟踪主多边形边边界;否则跟踪裁剪多边形边界.
(4) 跟踪多边形边界,每遇到多边形顶点,将其输出到结果多边形顶点表中,直至遇到新的交点.
(5)将该交点输出到结果多边形顶点表中,并通过连接该交点的双向指针改变跟踪方向(如果上一步跟踪的是主多边形边界,现在改为跟踪裁剪多边形边界;如果上一步跟踪裁剪多边形边界,现在改为跟踪主多边形边界).
(6)重复(4)、(5)直至回到起点