实现一个自制的Bootloader见:
01-基于imx6ul从0自制Bootloader专栏实现总结_【星星之火】的博客-CSDN博客
- 硬件平台:自制imx6ul(详见【ALLEGRO】从零制作imx6-PCB核心板全流程_【星星之火】的博客-CSDN博客)
- 系统:linux-4.1.15
- 文件系统:busybox-1.22.1.tar.bz2
- 编译器: gcc version 4.9.1 20140710 (prerelease) (crosstool-NG linaro-1.13.1-4.9-2014.07 - Linaro GCC 4.9-2014.07)
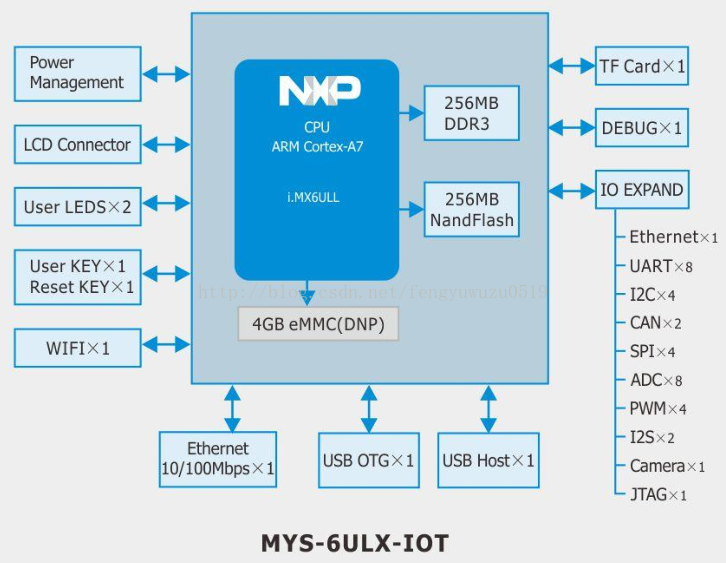
I.MX6ULL 系列是基于高性能、超低功率 ARM Cortex-A7核心 处理器,处理器运行速度高达 528 MHz。取代三星2440,慢慢成为国内流行的低端嵌入式linux产品的首选。本文 主要记录,拿到一款imx6如何重烧系统,搭建起开发环境。及mfgtools使用原理。
一、编译所需文件
(1)更新交叉编译工具链、
tar -jxvf gcc-linaro-arm-linux-gnueabihf-4.9-2014.07_linux -C /optPATH="/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/opt/gcc-linaro-arm-linux-gnueabihf-4.9-2014.07_linux/bin"
(2)编译uboot
tar xvf MYS-IMX6UL-uboot.tar.bz2make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- mys_imx6ull_14x14_nand_defconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf-uboot使用网络前:
setenv ipaddr 192.168.1.17
setenv ethaddr 00:0c:29:4d:e4:f4
setenv gatewayip 192.168.1.1
setenv netmask 255.255.255.0
setenv serverip 192.168.1.102
saveenvtar -xvf MYS-IMX6UL-Linux.tar.gzmake ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- mys_imx6_defconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- zImage dtbs modulesimx6支持Yocto来构建我们所需的文件系统,这里我们使用网络文件系统即可。
setenv bootargs noinitrd root=/dev/nfs nfsroot=192.168.1.102:/work/new_work/rootfs_2440 ip=192.168.1.17:192.168.1.102:192.168.1.1:255.255.255.0::eth0:off init=/linuxrc console=ttymxc0,115200此时我们准备好了:u-boot.imx 、zImage、zImage-imx6ul-14x14-evk.dtb、文件系统等。如何烧写呢?此时就需要用到NXP提供的一个工具。这里重点介绍一下这个工具的操作细节。
二、mfgtools软件的使用方法
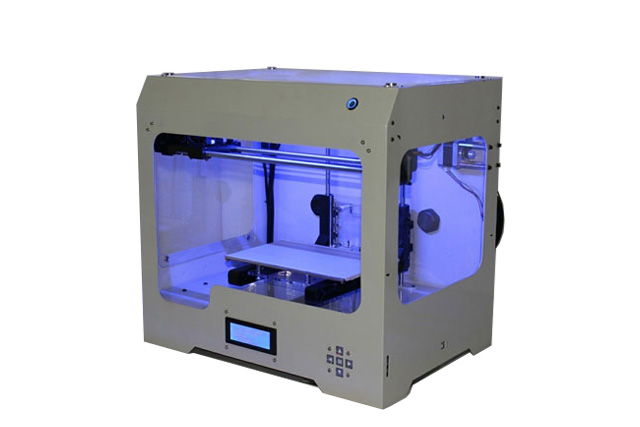
MFGTools 是 NXP 官方推荐的一个使用 OTG 来升级镜像的软件。此软件功能很轻大,而且可塑性非常高:可以用来升级 Linux,升级 Android;单独刷写某一系统分区,如 android 的 boot.img 分区等;独立地刷写 spi nor,emmc 等等;
1、几个重要的文件
(1)打开.vbs文件:如mfgtool2-yocto-mx-evk-nand.vbs
内容如下:
Set wshShell = CreateObject("WScript.shell")
wshShell.run "mfgtool2.exe -c ""linux"" -l ""NAND Flash"" -s ""board=sabreauto"" -s ""lite=l"" -s ""6uluboot=14x14evk"" -s ""nand=nand"" -s ""6uldtb=14x14-evk"" -s ""nanddtb=gpmi-weim"" -s ""part_uboot=0"" -s ""part_kernel=1"" -s ""part_dtb=2"" -s ""part_rootfs=3"" "
Set wshShell = Nothing
""lite=l"" -s ""6uluboot=14x14evk"" -s ""nand=nand"。 一会会用到
(2)MfgTool.log
记录烧写过程中的信息,出错可以来查看
(3)重点关心的目录:
工具目录下有如下目录:Profiles\Linux\OS Firmware
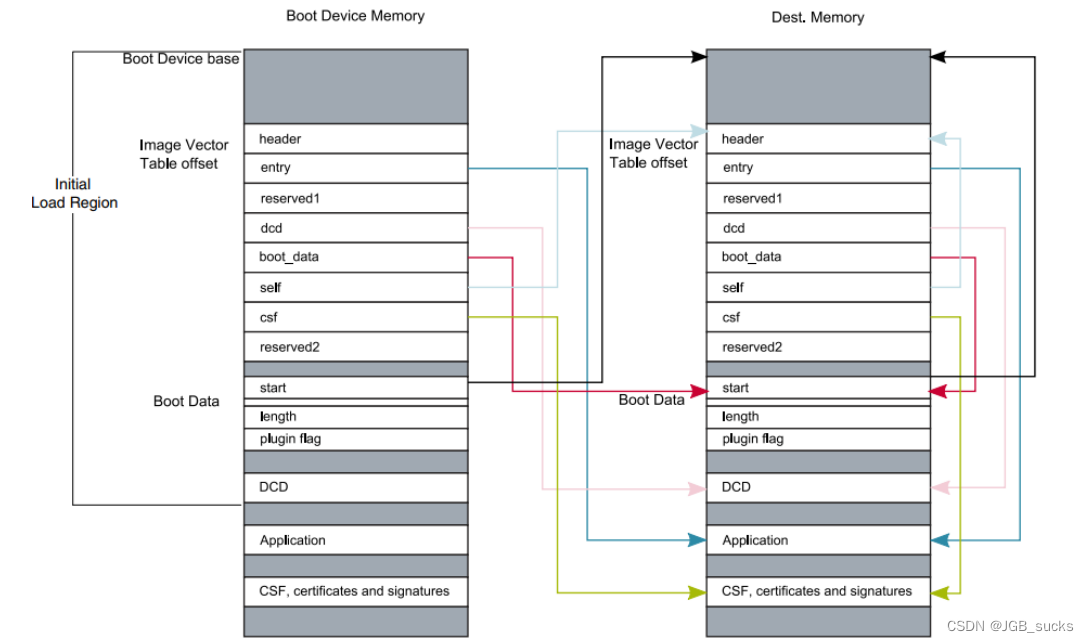
目录里面存放着的是镜像文件,镜像文件分为两种:第一种是作为媒介用途的镜像(可以启动的 linux 的 uboot 和 dtb 以及 zImage),存放于 mfgtools\Profiles\Linux\OS Firmware\firmware 目录;第二种是真正烧录到 emmc 或者 nand 的镜像文件,存放于mfgtools\Profiles\Linux\OS Firmware\files 目录。之所以存着这两种镜像,是因为 s MFGTools 的烧写原理是先将媒介镜像下载到到 ddr3内存里面,然后启动linux,再通过这个启动的linux把目标镜像固化到 emmc或者 nand里。
(4)Profiles\Linux\OS Firmware\ucl2.xml
升级时候的操作文件,s MFGtools 会根据文件里面 t list 的内容进行相应的升级。文件以
文件夹里面的文件到 emmc 里面。对于第二阶段,关注以下注释:
<CMD state="BootStrap"type="jump" > Jumping to OS image. </CMD>文件夹里面的文件到 emmc 里面。对于第二阶段,关注以下注释:
<!- -- create partition - --> >
<!- -- burn uboot - --> >
<!- -- burn uImage - --> >
<!- -- burn dtb - --> >
<!- -- burn rootfs - --> >ucl2.xml是很重要的文件,但是里面内容很简单,用到了最初定义的那个,这里就不唠叨了。很显然,这个软件配置好了,功能是很强大的。
2、烧写过程(注意顺序不要改变)
(1)调节拨码开关(改变SOC模式)
(2)上电
(3)连接OTG与开发板和PC
(4)双击:mfgtool2-yocto-mx6ul-evk-nand.vbs启动烧入软件
(5)点击MfgTool界上的"Start"按钮,此时会安装目录中配置文件的信息,开始烧入。
三、tftp烧写
抛开这些花哨的软件,使用最原始的方法烧写内核、设备树、文件系统等:
内核启动有如下分区:
0x000000000000-0x000000500000 : "boot"
0x000000500000-0x000000f00000 : "kernel"
0x000000f00000-0x000001000000 : "dtb"
0x000001000000-0x000010000000 : "rootfs"
//烧写内核
nand erase 0x500000 0xa00000
tftp zImage
nand write 0x80800000 0x500000 $filesize
//烧写设备树
nand erase 0xf00000 0x100000
tftp zImage-imx6ull-14x14-evk-gpmi-weim.dtb
nand write 0x80800000 0xf00000 $filesize总结:
到此我们可以实现mfgtools来烧写uboot及内核了。本人还是倾向于抛开这些工具,使用最通用的方法来烧写。
我们可以修改工具内的配置,使用这个工具只来更新uboot。之后我们可以通过nfs tftp等多种通用的方式来更新内核、设备树、及文件系统。