粒子群算法简介
前言
本文内容借鉴于 刘衍民的博士论文:“粒子群算法的研究及应用”.
现有的大多数群智能算法,如:乌鸦算法、鸽子算法、蚁群算法、萤火虫算法和灰狼优化算法等,都可以归类为粒子群算法.(个人觉得,这些算法就是整个稀奇古怪的名字,颇有舞文弄墨,强造创新点之嫌,其算法本质仍为粒子群算法).
粒子群算法与遗传算法最大的不同之处在于,不使用交叉和变异等进化算法产生后代,而是根据种群中其他粒子的分布来更新粒子的位置.
粒子群算法及其基础理论
粒子群算法是一种基于种群的智能算法,种群中每个成员叫做粒子,代表着一个潜在的可行解,而食物的位置则被认为是全局最优解.在飞行过程中,群体中所有的粒子都具有记忆的能力,能对自身位置和自身经历过的最佳位置进行调整.为了实现接近食物位置这个目的,每个粒子通过不断地向自身经历过的最佳位置(pbest)和种群中最好的粒子位置(gbest)学习,最终接近食物位置.(p,表示personal,“自知部分”.g,表示global, “社会部分”).
下图给出了粒子速度和位置在第t代和第t+1代的调整示意图,其中五角星的位置为食物位置,v1表示第t代"社会部分"学习引起粒子向gbest方向飞行的速度;v2表示"自知部分"学习引起粒子向pbest方向飞行的速度;v3表示粒子自身具有的速度.在v1,v2和v3的共同作用下,最终粒子以速度vt+1到达新的粒子位置.


粒子群算法的数学描述如下,假设种群规模为N,在迭代时刻t,每个粒子在D维空间中的坐标位置可以表示为:
x i ( t ) ‾ = ( x i 1 , x i 2 , . . . x i d , . . . x i D ) \overline{x_i\left( t \right) }=\left( x_{i}^{1},x_{i}^{2},...x_{i}^{d},...x_{i}^{D} \right) xi(t)=(xi1,xi2,...xid,...xiD)
粒子的速度表示为:
v i ( t ) ‾ = ( v i 1 , v i 2 , . . . v i d , . . . v i D ) \overline{v_i\left( t \right) }=\left( v_{i}^{1},v_{i}^{2},...v_{i}^{d},...v_{i}^{D} \right) vi(t)=(vi1,vi2,...vid,...viD)
坐标位置 x i ( t ) ‾ \overline{x_i\left( t \right) } xi(t)和速度 v i ( t ) ‾ \overline{v_i\left( t \right) } vi(t)在t+1时刻,按照下述方式进行调整,
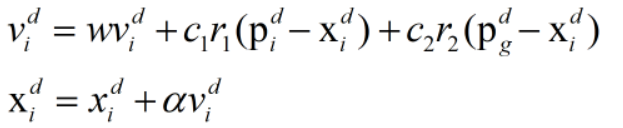
x i ‾ ( t + 1 ) = x i ‾ ( t ) + v i ‾ ( t + 1 ) \overline{x_i}\left( t+1 \right) =\overline{x_i}\left( t \right) +\overline{v_i}\left( t+1 \right) xi(t+1)=xi(t)+vi(t+1)
v i ‾ ( t + 1 ) = v i ‾ ( t ) + c 1 ⋅ r 1 ( p i ‾ ( t ) − x i ‾ ( t ) ) + c 2 ⋅ r 2 ( p g ‾ ( t ) − x i ‾ ( t ) ) \overline{v_i}\left( t+1 \right) =\overline{v_i}\left( t \right) +c_1\cdot r_1\left( \overline{p_i}\left( t \right) -\overline{x_i}\left( t \right) \right) +c_2\cdot r_2\left( \overline{p_g}\left( t \right) -\overline{x_i}\left( t \right) \right) vi(t+1)=vi(t)+c1⋅r1(pi(t)−xi(t))+c2⋅r2(pg(t)−xi(t))
速度更新公式包括三部分:第一部分是 v i ( t ) ‾ \overline{v_i\left( t \right) } vi(t),它表示粒子先前的速度,具有自身开拓、扩大搜索空间、探索新的搜索区域的趋势,这使算法具有全局优化能力,但是在算法的迭代后期它可能影响局部精细搜索.第二部分是 p i ( t ) ‾ \overline{p_i\left( t \right) } pi(t),表示粒子i所经历的最优位置(pbest),称作粒子的"自知部分"学习,表示粒子本身的思考,即向自身学习的能力;第三部分是 p g ( t ) ‾ \overline{p_g\left( t \right) } pg(t)表示种群中最好的粒子位置(gbest),称作粒子的"社会学习",表示粒子向整个种群学习的能力.
粒子速度更新的三部分共同决定了粒子在可行空间的搜索能力,其作用分别是:第一部分 v i ( t ) ‾ \overline{v_i\left( t \right) } vi(t),用来平衡全局和局部搜索的能力;第二部分是 p i ( t ) ‾ \overline{p_i\left( t \right) } pi(t)使粒子有较强的局部搜索能力;第三部分 p g ( t ) ‾ \overline{p_g\left( t \right) } pg(t)表现了粒子间的信息共享.另外,c1和c2表示粒子的加速常数,通常在[0,2]之间取值;r1和r2是两个在[0,1]之间均匀分布的随机数.
开发和探索
探索 (Exploration) 是指粒子在一定程度上离开原先的搜索轨迹,向新的方向进行搜索,体现了一种向未知区域开拓的能力,类似于全局搜索;开发 (Exploitation) 指粒子在一定程度上继续在原先的搜索轨迹上进行更细一步的搜索,主要指对探索过程中所搜索到的区域进行
更进一步的搜索,类似于局部搜索。