目录
一、常用函数
二、状态标记变量
三、串口接收中断流程
四、串口工具
五、配置1(非中断)
六、main.c代码(非中断)
七、配置2(中断)
八、main.c代码(中断)
一、常用函数
1.串口发送/接收函数:
HAL_UART_Transmit(); 串口发送数据,使用超时管理机制
HAL_UART_Receive(); 串口接收数据,使用超时管理机制
HAL_UART_Transmit_IT(); 串口中断模式发送
HAL_UART_Receive_IT(); 串口中断模式接收
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart,
uint8_t *pData, uint16_t Size, uint32_t Timeout)/*作用:以阻塞的方式发送指定字节的数据
形参 1 :UART_HandleTypeDef 结构体类型指针变量(串口地址)
形参 2:指向要发送的数据地址
形参 3:要发送的数据大小,以字节为单位
形参 4:设置的超时时间,以ms单位
*/HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart,
uint8_t *pData, uint16_t Size)/*作用:以中断的方式接收指定字节的数据
形参 1 :是 UART_HandleTypeDef 结构体类型指针变量(串口地址)
形参 2 :是指向接收数据缓冲区
形参 3 :是要接收的数据大小,以字节为单位
此函数执行完后将清除中断,需要再次调用以重新开启中断。
*/2.串口中断回调函数:
HAL_UART_IRQHandler(UART_HandleTypeDef *huart); //串口中断处理函数
HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart); //发送中断回调函数
HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart); //接收中断回调函数
二、状态标记变量
USART_RX_STA (可以设置为32位)
1.bit15当数据读取全部OK时,USART_RX_STA的最高位置置1
2.bit14当接收到0x0D(回车)置1
2.bit13~0串口中断接收到一个数据(一个字节)就自加1

三、串口接收中断流程

四、串口工具

五、配置1(非中断)
1.接线:TX -- A10 RX -- A9
2.时钟72MHz
3.串口配置

4.如果用printf进行串口发送数据要在keil5设置MicroLIB如下图所示

六、main.c代码(非中断)
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <string.h>
#include <stdio.h>
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
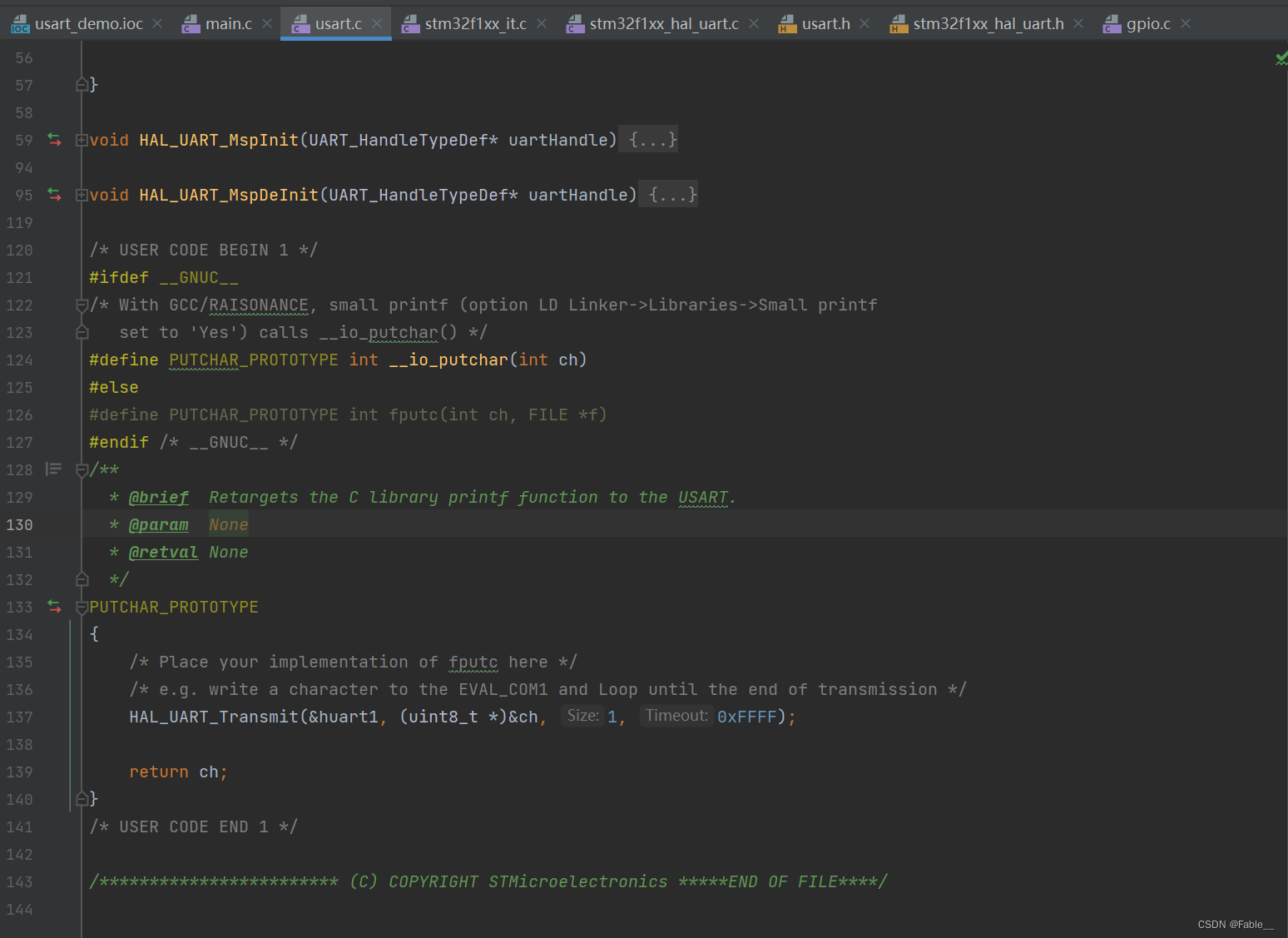
/* USER CODE BEGIN 0 *///如果重写下面fputc 就可以用printf发送数据,需要设置 如上图所示=============================
/*
int fputc(int ch,FILE *f)
{unsigned char temp[1] = {ch};HAL_UART_Transmit(&huart1,temp,1,0xffff);return ch;
}
*//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *///数据接收后存放的位置=========================================================================unsigned char ch[20] = {0};/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 *///发送数据================================================================================HAL_UART_Transmit(&huart1,"hello world\n",strlen("hello world\n"),100);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *///接收数据============================================================HAL_UART_Receive(&huart1,ch,19,100);HAL_UART_Transmit(&huart1,ch,strlen(ch),100);//接收后在发送//printf(ch);//配合fputc使用memset(ch,0,strlen(ch));/* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
七、配置2(中断)
打开串口中断

八、main.c代码(中断)
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2022 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdio.h>
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *///串口接收缓存(1字节)===================================================
uint8_t buf=0;
//定义最大接收字节数 200,可根据需求调整
#define UART1_REC_LEN 200
// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];
uint16_t UART1_RX_STA=0;//初始化状态标记变量
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */// 接收完成回调函数,收到一个数据后,在这里处理=========================================
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{// 判断中断是由哪个串口触发的if(huart->Instance == USART1){// 先判断接收是否完成(UART1_RX_STA bit15 位是否为1)if((UART1_RX_STA & 0x8000) == 0){// 如果bit14被置为1 则已经收到了0x0d (回车),if(UART1_RX_STA & 0x4000){// 则接着判断是否收到 0x0a (换行)if(buf == 0x0a)// 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1UART1_RX_STA |= 0x8000;else// 否则认为接收错误,重新开始UART1_RX_STA = 0;}else // 如果bit14没有被置为1{//则先判断收到的这个字符是否是 0x0d (回车)if(buf == 0x0d){// 是的话则将 bit14 位置为1UART1_RX_STA |= 0x4000;}else{// 否则将接收到的数据保存在缓存数组里UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf;UART1_RX_STA++;// 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收if(UART1_RX_STA > UART1_REC_LEN - 1)UART1_RX_STA = 0;}}}// 重新开启中断HAL_UART_Receive_IT(&huart1, &buf, 1);}
}//可以使用printf进行发送数据===================================================
int fputc(int ch, FILE *f)
{ unsigned char temp[1]={ch};HAL_UART_Transmit(&huart1,temp,1,0xffff); return ch;
}
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */// 开启接收中断=========================================================HAL_UART_Receive_IT(&huart1, &buf, 1);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 *///判断判断串口是否接收完成====================================================if(UART1_RX_STA & 0x8000){printf("收到数据:");// 将收到的数据发送到串口HAL_UART_Transmit(&huart1, UART1_RX_Buffer, UART1_RX_STA & 0x3fff, 0xffff);// 等待发送完成while(huart1.gState != HAL_UART_STATE_READY);//HAL_UART_STATE_READY发送完成标志位printf("\r\n");// 重新开始下一次接收UART1_RX_STA = 0;}printf("hello liangxu\r\n");HAL_Delay(1000);}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */