转自:原文链接
条件随机场是一种判别模型,用于预测序列。他们使用来自先前标签的上下文信息,从而增加了模型做出良好预测所需的信息量。在这篇文章中,我将讨论一些将介绍 CRF 的主题。我会过去:
- 什么是判别分类器(以及它们与生成分类器的比较)
- 条件随机场的数学概述
- CRF 与隐马尔可夫模型有何不同
- CRF的应用
什么是判别分类器
机器学习模型有两个常见的分类,生成式和判别式。条件随机场是一种判别分类器,因此,它们对不同类之间的决策边界进行建模. 另一方面,生成模型对数据的生成方式进行建模,在学习之后,可用于进行分类任务。举个简单的例子,朴素贝叶斯是一种非常简单且流行的概率分类器,是一种生成算法,而逻辑回归是一种基于最大似然估计的分类器,是一种判别模型。让我们看看如何使用这些模型来计算标签预测:
朴素贝叶斯分类器基于贝叶斯公式:
p ( y ∣ x ) = p ( y ) p ( x ∣ y ) p ( x ) p(y|x)=\frac{p(y)p(x|y)}{p(x)} p(y∣x)=p(x)p(y)p(x∣y)
换成分类任务的表达式:
p ( 类 别 ∣ 特 征 ) = p ( 特 征 ∣ 类 别 ) p ( 类 别 ) p ( 特 征 ) p(类别|特征)=\frac{p(特征|类别)p(类别)}{p(特征)} p(类别∣特征)=p(特征)p(特征∣类别)p(类别)
通常特征 X X X会包含很多元素 x i x_i xi,类别 Y Y Y也会包含很多类别 y k y_k yk,所以
p ( 特 征 ∣ 类 别 ) → p ( X ∣ Y = y k ) p(特征|类别)\rightarrow p(X|Y=y_k) p(特征∣类别)→p(X∣Y=yk)
然后我们假设所有特征之间都是相互独立的,因此公式可以转换为:
p ( X ∣ Y = y k ) = ∏ i n p ( X = x i ∣ Y = y k ) p ( X ) = p ( x 1 x 2 … x n ) p(X|Y=y_k) = \prod_i^np(X=x_i|Y=y_k)\\ p(X)=p(x_1x_2\dots x_n) p(X∣Y=yk)=i∏np(X=xi∣Y=yk)p(X)=p(x1x2…xn)
比如,我们想求 p ( 皮 薄 , 红 , 脆 , 水 分 多 ∣ 苹 果 甜 ) p(皮薄,红,脆,水分多 | 苹果甜) p(皮薄,红,脆,水分多∣苹果甜),则可以通过 p ( 皮 薄 ∣ 苹 果 甜 ) ∗ p ( 红 ∣ 苹 果 甜 ) ∗ p ( 脆 ∣ 苹 果 甜 ) ∗ p ( 水 分 多 ∣ 苹 果 甜 ) p(皮薄 | 苹果甜)*p(红 | 苹果甜)*p(脆 | 苹果甜)*p(水分多 | 苹果甜) p(皮薄∣苹果甜)∗p(红∣苹果甜)∗p(脆∣苹果甜)∗p(水分多∣苹果甜)得到。
带入到 p ( 类 别 ∣ 特 征 ) p(类别|特征) p(类别∣特征)可以得到:
p ( Y = y k ∣ X ) = p ( Y = y k ) ∏ i n p ( X = x i ∣ Y = y k ) p ( x 1 x 2 … x n ) p(Y=y_k|X) = \frac{p(Y=y_k) \prod_i^np(X=x_i|Y=y_k)}{p(x_1x_2\dots x_n)} p(Y=yk∣X)=p(x1x2…xn)p(Y=yk)∏inp(X=xi∣Y=yk)
由于分母是常数,所以可以直接省略,因为朴素贝叶斯分类器的目的是为了找到使 p ( Y = y k ∣ X ) p(Y=y_k|X) p(Y=yk∣X)最大的 y k y_k yk。
p ( y k ∣ X ) ≈ p ( y k ) ∏ i n p ( x i ∣ y k ) p(y_k|X) \approx p(y_k) \prod_i^np(x_i|y_k) p(yk∣X)≈p(yk)i∏np(xi∣yk)
所以朴素贝叶斯分类器的公式如下:
y ^ k = a r g m a x y k p ( y k ) ∏ i n p ( x i ∣ y k ) \hat y_k = argmax_{y_k}p(y_k)\prod_i^np(x_i|y_k) y^k=argmaxykp(yk)i∏np(xi∣yk)
逻辑回归分类器是基于Logistic函数的,已知如下:
f ( x ) = 1 1 + e − x = e x 1 + e x f(x) = \frac{1}{1+e^{-x}} = \frac{e^x}{1+e^x} f(x)=1+e−x1=1+exex
上述也是逻辑分布在 μ = 0 , γ = 1 μ=0, γ=1 μ=0,γ=1的分布函数。回想一下朴素贝叶斯是通过贝叶斯公式从 p ( X ∣ y k ) p(X|y_k) p(X∣yk)推出的 p ( y k ∣ X ) p(y_k|X) p(yk∣X),然而我们可以利用逻辑回归直接建模 p ( y k ∣ X ) p(y_k|X) p(yk∣X),同时也避免了线性回归的输出不在0-1之间(通过对线性输出进行对数odds)。
为了学习逻辑回归中两个类之间的决策边界,分类器学习与每个数据点相关的权重(θ值),写法如下:
二 元 分 类 时 , p ( y k ∣ X ; θ ) = 1 1 + e x p ( − ( θ 0 + ∑ f = 1 F θ f x f ) ) = 1 1 + e x p ( θ T X ) 多 元 分 类 时 , 使 用 s o f t m a x : p ( y k ∣ X ; θ ) = e x p ( θ c T X ) ∑ f e x p ( θ f T X ) 二元分类时,p(y_k|X;\theta) = \frac{1}{1+exp(-(\theta_0+\sum_{f=1}^F\theta_fx_f))}=\frac{1}{1+exp(\theta^TX)} \\ 多元分类时,使用softmax:p(y_k|X;\theta) = \frac{exp(\theta_c^TX)}{\sum_fexp(\theta^T_fX)} 二元分类时,p(yk∣X;θ)=1+exp(−(θ0+∑f=1Fθfxf))1=1+exp(θTX)1多元分类时,使用softmax:p(yk∣X;θ)=∑fexp(θfTX)exp(θcTX)
此时我们最后得到的分类 y k y_k yk也是通过寻找最大概率得到的。
y ^ = a r g m a x y k p ( y k ∣ X ) \hat y = argmax_{y_k}p(y_k|X) y^=argmaxykp(yk∣X)
如果把 p ( y k ∣ X ) p(y_k|X) p(yk∣X)又通过贝叶斯转换得到 p ( X ∣ y k ) p ( y k ) p(X|y_k)p(y_k) p(X∣yk)p(yk),就又得到了先前的朴素贝叶斯生成分类器。然而 p ( X ∣ y k ) p ( y k ) p(X|y_k)p(y_k) p(X∣yk)p(yk)又等于 p ( X ∣ y k ) p(X|y_k) p(X∣yk),即 X , y k X,y_k X,yk的联合分布。这一观察结果支持了生成分类器的早期定义。通过对类之间的联合概率分布进行建模,在给定标签 Y 和联合概率分布的情况下,生成模型可用于获取和“生成”输入点 X。类似地,判别模型通过学习条件概率分布,学习了分隔数据点的决策边界。因此,给定一个输入点,它可以使用条件概率分布来计算它的类别。
这些定义如何应用于条件随机场(Conditional Random Field, CRF)?条件随机场是一种判别模型,其基本原理是将逻辑回归应用于序列输入。如果熟悉隐马尔可夫模型(HMM),就会发现它们与 CRF 有一些相似之处,其中之一是它们也用于序列输入。HMM 使用状态转移矩阵和输入向量来学习发射(观测)矩阵,并且在概念上类似于朴素贝叶斯。HMM 是一种生成模型。
条件随机场的数学概述
讨论了上述定义后,我们现在将讨论条件随机场,以及如何使用它们来学习序列数据。
正如我们在上一节中所展示的,我们对条件分布建模如下:
y ^ = a r g m a x y p ( y ∣ x ) \hat y = argmax_{y}p(y|x) y^=argmaxyp(y∣x)
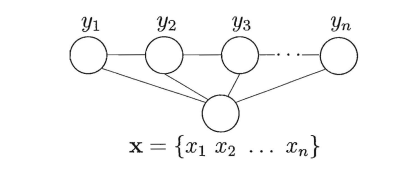
在 CRF 中,我们的输入数据是连续的,在对数据点进行预测时,我们必须考虑先前的上下文。为了建模这种行为,我们将使用特征函数,它有多个输入值,它们将是:
- 输入向量集合 X
- 我们正在预测的数据点的位置 i
- X中数据点i-1的标签
- X中数据点i的标签
我们将特征函数定义为:
f ( X , i , l i − 1 , l i ) f(X,i,l_{i-1},l_i) f(X,i,li−1,li)
特征函数的目的是表达数据点所代表的序列的某种特征。例如,如果我们使用 CRF 进行词性标注,那么:
如果 l i − 1 l_{i - 1} li−1 是名词, l i l_{i} li 是动词,那我们认为 f ( X , i , l i − 1 , l i ) = 1 f (X, i, l_{i - 1}, l_{i} ) = 1 f(X,i,li−1,li)=1,也可以理解为这种顺序是合理的。否则为 0 。
类似地,如果 l i − 1 l_{i - 1} li−1 是动词且 l i l_{i} li是副词,则 f ( X , i , l i − 1 , l i ) = 1 f (X, i, l_{i - 1}, l_{i} ) = 1 f(X,i,li−1,li)=1 。否则为 0 。
每个特征函数都基于前一个词和当前词的标签,并且是 0 或 1。为了构建条件字段,我们接下来为每个特征函数分配一组权重(λ值),公式如下(回想一下逻辑回归,记得CRF基本原理是将逻辑回归应用于序列输入):
P ( y ∣ X , λ ) = 1 Z ( X ) e x p ∑ i = 1 n ∑ j λ j f i ( X , i , y i − 1 , y i ) 其 中 : Z ( X ) = ∑ y ′ ∈ y ∑ i = 1 n ∑ j λ j f i ( X , i , y i − 1 ′ , y i ′ ) P(y | X,\lambda) = \frac{1}{Z(X)}exp{\sum_{i=1}^n\sum_j\lambda_jf_i(X,i,y_{i-1},y_i)}\\ 其中:Z(X)=\sum_{y'\in y}\sum^n_{i=1}\sum_j \lambda_jf_i(X,i,y'_{i-1},y'_i) P(y∣X,λ)=Z(X)1expi=1∑nj∑λjfi(X,i,yi−1,yi)其中:Z(X)=y′∈y∑i=1∑nj∑λjfi(X,i,yi−1′,yi′)
为了估计参数 (λ),我们将使用最大似然估计。我们首先取分布的负对数(softmax通常和它搭配),以使偏导数更易于计算:

为了在负对数函数上应用最大似然,我们将采用argmin(因为最小化负数将产生最大值)。为了找到最小值,我们可以对 lambda 进行偏导,并得到:
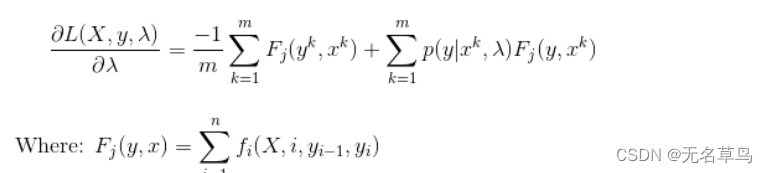
我们使用偏导作为梯度下降的一个步骤。梯度下降迭代地更新参数值,步长很小,直到值收敛。我们最终的 CRF 梯度下降更新方程是:

总而言之,我们使用条件随机场首先定义所需的特征函数,将权重初始化为随机值,然后迭代地应用梯度下降,直到参数值(在本例中为 lambda)收敛。我们可以看到 CRF 类似于 Logistic 回归,因为它们使用条件概率分布,但是我们通过将特征函数作为我们的顺序输入来扩展算法。
CRF 与隐马尔可夫模型有何不同
从前面的部分可以看出,条件随机场与隐马尔可夫模型有何不同。尽管两者都用于对顺序数据进行建模,但它们是不同的算法。
隐马尔可夫模型是生成的,并通过对联合概率分布建模来给出输出。另一方面,条件随机场具有判别性,并对条件概率分布进行建模。CRF 不依赖独立性假设(标签相互独立),并避免标签偏差。一种看待它的方法是,隐马尔可夫模型是条件随机场的一种非常特殊的情况,而是使用恒定的转移概率。HMMs 基于朴素贝叶斯,我们说它可以从逻辑回归中推导出来,而 CRF 就是从其中推导出来的。
CRF的应用
鉴于 CRF 能够对序列数据进行建模,CRF 通常用于自然语言处理,并且在该领域有很多应用。我们讨论的一个这样的应用是词性标注。句子的词性依赖于先前的单词,通过使用利用这一点的特征函数,我们可以使用 CRF 来学习如何区分句子中的哪些词对应于哪个 POS。另一个类似的应用是命名实体识别,或从句子中提取专有名词。条件随机场可用于预测多个变量相互依赖的任何序列。其他应用包括图像中的部分识别和基因预测。