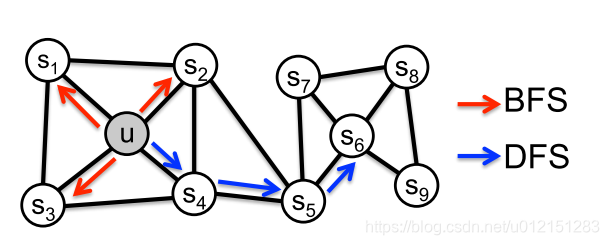
前面介绍过基于DFS邻域的DeepWalk和基于BFS邻域的LINE。
DeepWalk:算法原理,实现和应用
LINE:算法原理,实现和应用
node2vec是一种综合考虑DFS邻域和BFS邻域的graph embedding方法。简单来说,可以看作是eepwalk的一种扩展,可以看作是结合了DFS和BFS随机游走的deepwalk。
nodo2vec 算法原理
优化目标
设 f ( u ) f(u) f(u)是将顶点 u u u映射为embedding向量的映射函数,对于图中每个顶点 u u u,定义 N S ( u ) N_S(u) NS(u)为通过采样策略 S S S采样出的顶点 u u u的近邻顶点集合。
node2vec优化的目标是给定每个顶点条件下,令其近邻顶点出现的概率最大。
m a x f ∑ u ∈ V log P r ( N S ( U ) ∣ f ( u ) ) max_f {\sum_{u\in V}\log{Pr(N_S(U)|f(u))}} maxf∑u∈VlogPr(NS(U)∣f(u))
为了将上述最优化问题可解,文章提出两个假设:
- 条件独立性假设
假设给定源顶点下,其近邻顶点出现的概率与近邻集合中其余顶点无关。
P r ( N s ( u ) ∣ f ( u ) ) = ∏ n i ∈ N s ( u ) P r ( n i ∣ f ( u ) ) Pr(N_s(u)|f(u))=\prod_{n_i\in N_s(u)} Pr(n_i|f(u)) Pr(Ns(u)∣f(u))=∏ni∈Ns(u)Pr(ni∣f(u)) - 特征空间对称性假设
这里是说一个顶点作为源顶点和作为近邻顶点的时候共享同一套embedding向量。(对比LINE中的2阶相似度,一个顶点作为源点和近邻点的时候是拥有不同的embedding向量的)
在这个假设下,上述条件概率公式可表示为 P r ( n i ∣ f ( u ) ) = exp f ( n i ) ⋅ f ( u ) ∑ v ∈ V exp f ( v ) ⋅ f ( u ) Pr(n_i|f(u))=\frac{\exp{f(n_i)\cdot f(u)}}{\sum_{v\in V}{\exp{f(v)\cdot f(u)}}} Pr(ni∣f(u))=∑v∈Vexpf(v)⋅f(u)expf(ni)⋅f(u)
根据以上两个假设条件,最终的目标函数表示为
m a x f ∑ u ∈ V [ − log Z u + ∑ n i ∈ N s ( u ) f ( n i ) ⋅ f ( u ) ] max_f{\sum_{u\in V}[-\log{Z_u}+\sum_{n_i\in N_s(u)}{f(n_i)\cdot f(u)}]} maxf∑u∈V[−logZu+∑ni∈Ns(u)f(ni)⋅f(u)]
由于归一化因子 Z u = ∑ n i ∈ N s ( u ) exp ( f ( n i ) ⋅ f ( u ) ) Z_u=\sum_{n_i\in N_s(u)}{\exp(f(n_i)\cdot f(u))} Zu=∑ni∈Ns(u)exp(f(ni)⋅f(u))的计算代价高,所以采用负采样技术优化。
采样策略
node2vec依然采用随机游走的方式获取顶点的近邻序列,不同的是node2vec采用的是一种有偏的随机游走。
给定当前顶点 v v v,访问下一个顶点 x x x的概率为
P ( c i = x ∣ c i − 1 = v ) = { π v x Z if ( v , x ) ∈ E 0 otherwise P(c_i=x|c_{i-1}=v)=\left\{ \begin{aligned} \frac{\pi_ {vx}}{Z} & & \text{if }(v,x)\in E \\ 0 & & \text{otherwise} \\ \end{aligned} \right. P(ci=x∣ci−1=v)=⎩⎨⎧Zπvx0if (v,x)∈Eotherwise
π v x \pi_{vx} πvx是顶点 v v v和顶点 x x x之间的未归一化转移概率, Z Z Z是归一化常数。
node2vec引入两个超参数 p p p和 q q q来控制随机游走的策略,假设当前随机游走经过边 ( t , v ) (t,v) (t,v)到达顶点 v v v
设 π v x = α p q ( t , x ) ⋅ w v x \pi_{vx}=\alpha_{pq}(t,x)\cdot w_{vx} πvx=αpq(t,x)⋅wvx, w v x w_{vx} wvx是顶点 v v v和 x x x之间的边权,
α p q ( t , x ) = { 1 p = if d t x = 0 1 = if d t x = 1 1 q = if d t x = 2 \alpha_{pq}(t,x)=\left\{ \begin{aligned} \frac{1}{p} & = & \text{if }d_{tx}=0\\ 1 & = & \text{if }d_{tx}=1\\ \frac{1}{q} & = & \text{if }d_{tx}=2\\ \end{aligned} \right. αpq(t,x)=⎩⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎧p11q1===if dtx=0if dtx=1if dtx=2
d t x d_{tx} dtx为顶点 t t t和顶点 x x x之间的最短路径距离。
下面讨论超参数 p p p和 q q q对游走策略的影响
- Return parameter,p
参数 p p p控制重复访问刚刚访问过的顶点的概率。
注意到 p p p仅作用于 d t x = 0 d_{tx}=0 dtx=0的情况,而 d t x = 0 d_{tx}=0 dtx=0表示顶点 x x x就是访问当前顶点 v v v之前刚刚访问过的顶点。
那么若 p p p较高,则访问刚刚访问过的顶点的概率会变低,反之变高。 - In-out papameter,q
q q q控制着游走是向外还是向内,若q>1,随机游走倾向于访问和 t t t接近的顶点(偏向BFS)。若 q < 1 q<1 q<1,倾向于访问远离 t t t的顶点(偏向DFS)。
下面的图描述的是当从t访问到v时,决定下一个访问顶点时每个顶点对应的 α \alpha α。

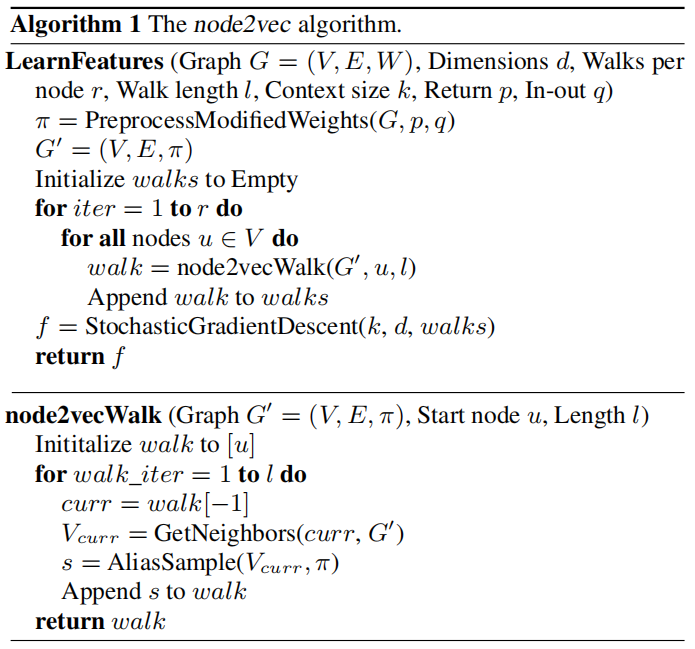
学习算法
采样完顶点序列后,剩下的步骤就和deepwalk一样了,用word2vec去学习顶点的embedding向量。
值得注意的是node2vecWalk中不再是随机抽取邻接点,而是按概率抽取,node2vec采用了Alias算法进行顶点采样。
Alias Method:时间复杂度O(1)的离散采样方法
node2vec核心代码
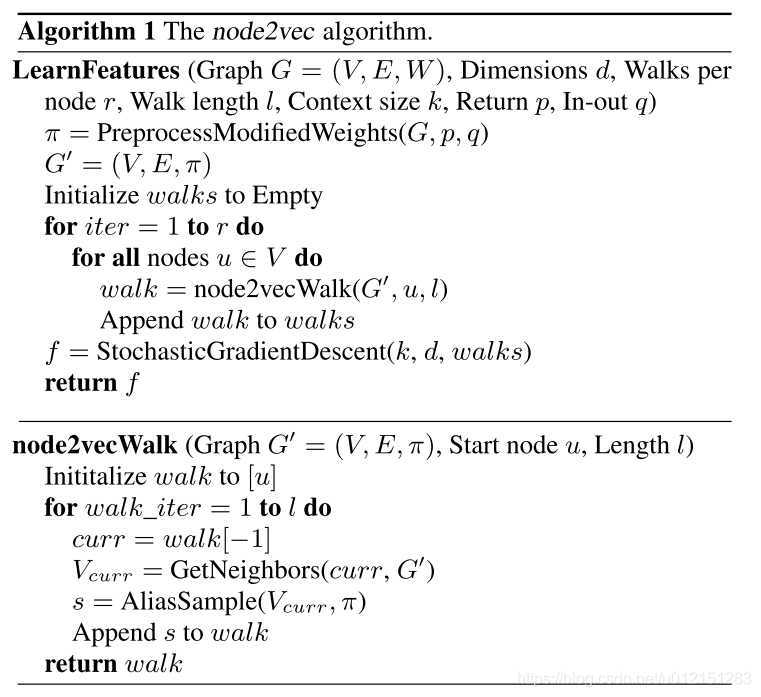
node2vecWalk
通过上面的伪代码可以看到,node2vec和deepwalk非常类似,主要区别在于顶点序列的采样策略不同,所以这里我们主要关注node2vecWalk的实现。
由于采样时需要考虑前面2步访问过的顶点,所以当访问序列中只有1个顶点时,直接使用当前顶点和邻居顶点之间的边权作为采样依据。
当序列多余2个顶点时,使用文章提到的有偏采样。
def node2vec_walk(self, walk_length, start_node):G = self.G alias_nodes = self.alias_nodes alias_edges = self.alias_edgeswalk = [start_node]while len(walk) < walk_length: cur = walk[-1] cur_nbrs = list(G.neighbors(cur)) if len(cur_nbrs) > 0: if len(walk) == 1: walk.append(cur_nbrs[alias_sample(alias_nodes[cur][0], alias_nodes[cur][1])]) else: prev = walk[-2] edge = (prev, cur) next_node = cur_nbrs[alias_sample(alias_edges[edge][0],alias_edges[edge][1])] walk.append(next_node) else: breakreturn walk
构造采样表
preprocess_transition_probs分别生成alias_nodes和alias_edges,alias_nodes存储着在每个顶点时决定下一次访问其邻接点时需要的alias表(不考虑当前顶点之前访问的顶点)。alias_edges存储着在前一个访问顶点为 t t t,当前顶点为 v v v时决定下一次访问哪个邻接点时需要的alias表。
get_alias_edge方法返回的是在上一次访问顶点 t t t,当前访问顶点为 v v v时到下一个顶点 x x x的未归一化转移概率 π v x = α p q ( t , x ) ⋅ w v x \pi_{vx}=\alpha_{pq}(t,x)\cdot w_{vx} πvx=αpq(t,x)⋅wvx
def get_alias_edge(self, t, v):G = self.G p = self.p q = self.qunnormalized_probs = [] for x in G.neighbors(v): weight = G[v][x].get('weight', 1.0)# w_vx if x == t:# d_tx == 0 unnormalized_probs.append(weight/p) elif G.has_edge(x, t):# d_tx == 1 unnormalized_probs.append(weight) else:# d_tx == 2 unnormalized_probs.append(weight/q) norm_const = sum(unnormalized_probs) normalized_probs = [float(u_prob)/norm_const for u_prob in unnormalized_probs]return create_alias_table(normalized_probs)def preprocess_transition_probs(self):G = self.Galias_nodes = {} for node in G.nodes(): unnormalized_probs = [G[node][nbr].get('weight', 1.0) for nbr in G.neighbors(node)] norm_const = sum(unnormalized_probs) normalized_probs = [float(u_prob)/norm_const for u_prob in unnormalized_probs] alias_nodes[node] = create_alias_table(normalized_probs)alias_edges = {}for edge in G.edges(): alias_edges[edge] = self.get_alias_edge(edge[0], edge[1])self.alias_nodes = alias_nodes self.alias_edges = alias_edgesreturn
node2vec应用
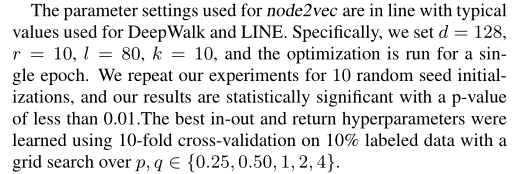
使用node2vec在wiki数据集上进行节点分类任务和可视化任务。 wiki数据集包含 2,405 个网页和17,981条网页之间的链接关系,以及每个网页的所属类别。 通过简单的超参搜索,这里使用p=0.25,q=4的设置。
本例中的训练,评测和可视化的完整代码在下面的git仓库中,
https://github.com/shenweichen/GraphEmbedding
G = nx.read_edgelist('../data/wiki/Wiki_edgelist.txt',create_using=nx.DiGraph(),nodetype=None,data=[('weight',int)])model = Node2Vec(G,walk_length=10,num_walks=80,p=0.25,q=4,workers=1)
model.train(window_size=5,iter=3)
embeddings = model.get_embeddings()evaluate_embeddings(embeddings)
plot_embeddings(embeddings)
分类任务
micro-F1: 0.6757
macro-F1: 0.5917
这个结果相比于DeepWalk和LINE是有提升的。
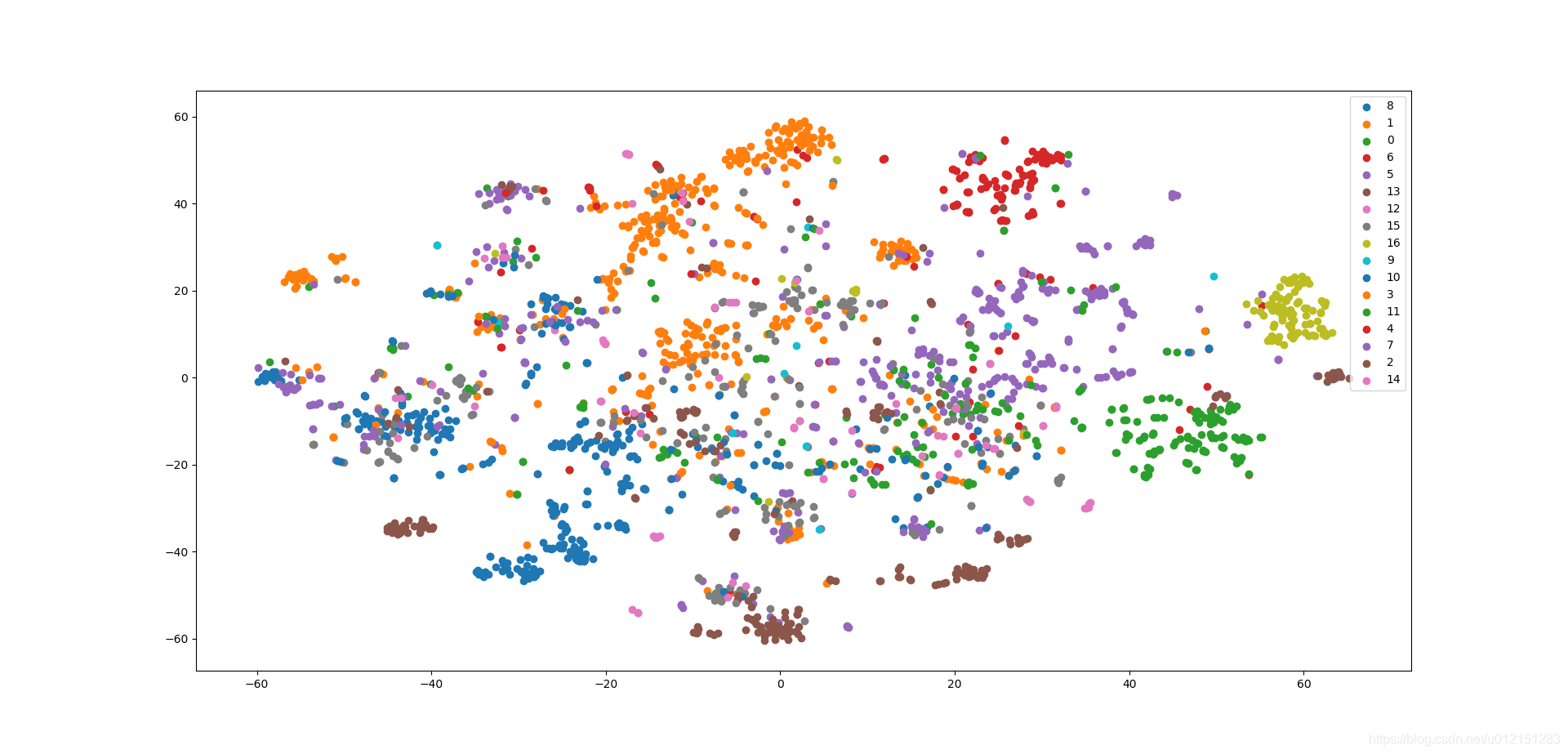
可视化
这个结果相比于DeepWalk和LINE可以看到不同类别的分布更加分散了。
参考资料
- Grover A, Leskovec J. node2vec: Scalable Feature Learning for Networks[C]// Acm Sigkdd International Conference on Knowledge Discovery & Data Mining. 2016.
图算法干货汇总
我把近年来主流的图表示学习方法的paper和对应的代码实现进行了汇总整理,扫码关注公众号【浅梦的学习笔记】,后台回复【图算法】即可打包下载。

欢迎加入星球群,一个由1300+小伙伴共建的交流平台,专注于前沿graph embedding算法技术与实践经验的分享学习。