第9章 深入理解Vold和Rild
9.1 概述
本章将分析Android系统中两个比较重要的程序,它们分别是:
- Vold:Volume Daemon,用于管理和控制Android平台外部存储设备的后台进程,这些管理和控制,包括SD卡的插拔事件检测、SD卡挂载、卸载、格式化等。
- Rild:Radio Interface Layer Daemon,用于智能手机的通讯管理和控制的后台进程,所有和手机通讯相关的功能,例如接打电话、收发短信/彩信、GPRS等都需要Rild的参与。
Vold和Rild都是Native的程序,另外Java世界还有和它们交互的模块,它们分别是:
- MountService和Vold交互,一方面它可以接收来自Vold的消息,例如,在应用程序中经常监听到的ACTION_MEDIA_MOUNTED/ACTION_MEDIA_EJECT等广播,就是由MountService根据Vold的信息而触发的。另一方面,它可以向Vold发送控制命令,例如挂载SD卡为磁盘驱动器的操作,就是由MountService发送命令给Vold来执行的。
- Phone和Rild交互,它是一个比较复杂的应用程序。简单来说,Phone拨打电话时需要发送对应的命令给Rild来执行。后面在Rild的实例分析中会做相关介绍。
这两个Daemon代码的结构都不算太复杂。本章将和大家一起来领略一下它们的风采。
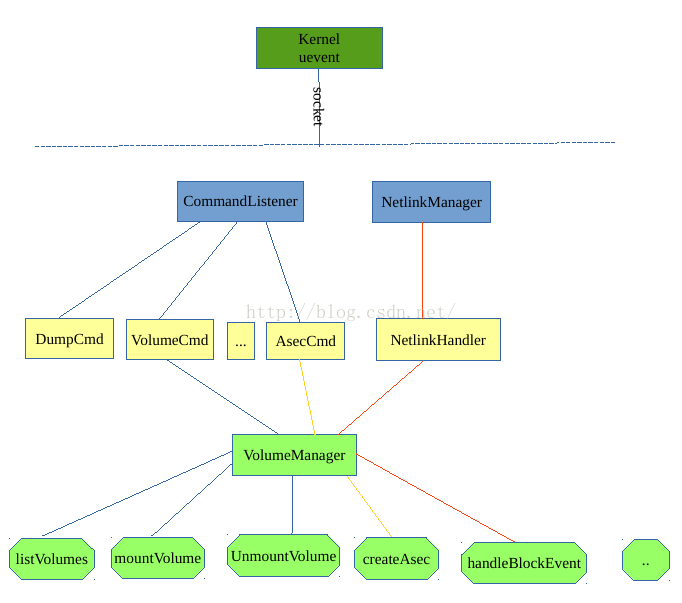
9.2 Vold的原理与机制分析
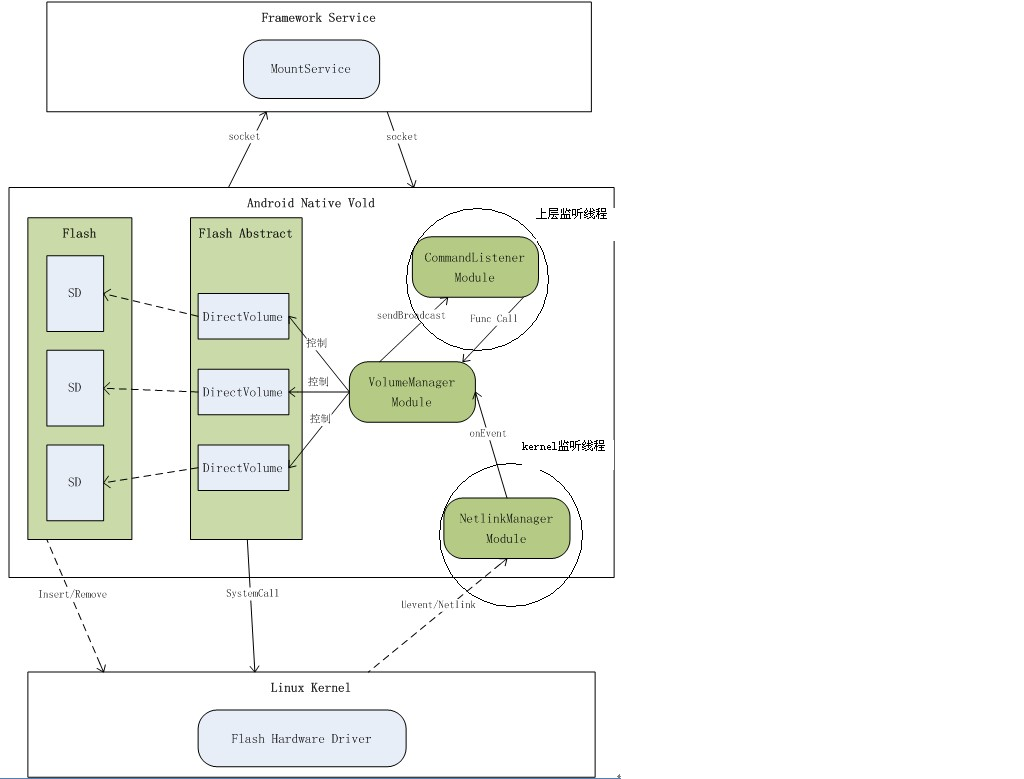
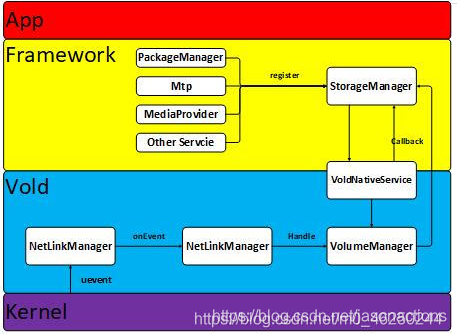
Vold是Volume Daemon的缩写,它是Android平台中外部存储系统的管控中心,是一个比较重要的进程。虽然它的地位很重要,但其代码结构却远没有前面的Audio和Surface系统复杂。欣赏完Audio和Surface的大气磅礴后,再来感受一下Vold的小巧玲珑也会别有一番情趣。Vold的架构可用图9-1来表示:

从上图中可知:
- Vold中的NetlinkManager模块(简称NM)接收来自Linux内核的uevent消息。例如SD卡的插拔等动作都会引起Kernel向NM发送uevent消息。
- NM将这些消息转发给VolumeManager模块(简称VM)。VM会对应做一些操作,然后把相关信息通过CommandListener(简称CL)发送给MountService,MountService根据收到的消息会发送相关的处理命令给VM做进一步的处理。例如待SD卡插入后,VM会将来自NM的“Disk Insert”消息发送给MountService,而后MountService则发送“Mount”指令给Vold,指示它挂载这个SD卡。
- CL模块内部封装了一个Socket用于跨进程通信。它在Vold进程中属于监听端(即是服务端),而它的连接端(即客户端)则是MountService。它一方面接收来自MountService的控制命令(例如卸载存储卡、格式化存储卡等),另一方面VM和NM模块又会通过它,将一些信息发送给MountService。
相比于Audio和Surface系统,Vold的架构确实比较简单,并且Vold和MountService所在的进程(这个进程其实就是system_server)在进行进程间通信时,也没有利用Binder机制,而是直接使用了Socket,这样,在代码量和程序中类的派生关系上也会简单不少。
9.2.1 Netlink和Uevent的介绍
在分析Vold的代码前,先介绍一下Linux系统中的Netlink和Uevent。
1. Netlink的介绍
Netlink是Linux系统中一种用户空间进程和Kernel进行通信的机制,通过这个机制,位于用户空间的进程,可接收来自Kernel的一些信息(例如Vold中用到的USB或SD的插拔消息),同时应用层也可通过Netlink向Kernel发送一些控制命令。
目前,Linux系统并没有为Netlink单独设计一套系统调用,而是复用了Socket的操作接口,只在创建Socket时会有一些特殊的地方。Netlink的具体使用方法,在进行代码分析时再来了解,读者目前只需知道,通过Netlink机制应用层,可接收来自Kernel的消息即可。
2. Uevent介绍
Uevent和Linux的Udev设备文件系统和设备模型有关系,它实际上就是一串字符串,字符串的内容可告知发生了什么事情。下面通过一个实例来直观感受Uevent:
在SD卡插入手机后(我们这里以SD卡为例),系统会检测到这个设备的插入,然后内核会通过Netlink发送一个消息给Vold,Vold将根据接收到的消息进行处理,例如挂载这个SD卡。内核发送的这个消息,就是Uevent,其中U代表User space(应用层空间)。下面看SD卡插入时Vold截获到的Uevent消息。在我的G7手机上,Uevent的内容如下,注意,其中//号或/**/号中的内容是为方便读者理解而加的注释:
SD卡插入的Uevent消息
//mmc表示MultiMedia Card,这里统称为SD卡
add@/devices/platform/msm_sdcc.2/mmc_host/mmc1/mmc1:c9f2/block/mmcblk0
ACTION=add //add表示设备插入,另外还有remove和change等动作
//DEVPATH表示该设备位于/sys目录中的设备路径
DEVPATH=/devices/platform/msm_sdcc.2/mmc_host/mmc1/mmc1:c9f2/block/mmcblk0
/*
SUBSYSTEM表示该设备属于哪一类设备,block为块设备,磁盘也属于这一类设备,另外还有
character(字符)设备等类型。
*/
SUBSYSTEM=block
MAJOR=179//MAJOR和MINOR分别表示该设备的主次设备号,二者联合起来可以标识一个设备
MINOR=0
DEVNAME=mmcblk0
DEVTYPE=disk//设备Type为disk
NPARTS=3 //这个表示该SD卡上的分区,我的SD卡上有三块分区
SEQNUM=1357//序号
由于我的SD卡上还有分区,所以还会接收到和分区相关的Uevent。简单看一下:
SD卡插入后和分区相关的Uevent消息
add@/devices/platform/msm_sdcc.2/mmc_host/mmc1/mmc1:c9f2/block/mmcblk0/mmcblk0p1
ACTION=add
//比上面那个DEVPATH多了一个mmcblk0p1
DEVPATH=/devices/platform/msm_sdcc.2/mmc_host/mmc1/mmc1:c9f2/block/mmcblk0/mmcblk0p1
SUBSYSTEM=block
MAJOR=179
MINOR=1
DEVNAME=mmcblk0p1
DEVTYPE=partition //设备类型变为partition,表示分区
PARTN=1
SEQNUM=1358
通过上面实例,我们和Uevent来了一次亲密接触,具体到Vold,也就是内核通过Uevent告知外部存储系统发生了哪些事情,那么Uevent在什么情况下会由Kernel发出呢?
- 当设备发生变化时,这会引起Kernel发送Uevent消息,例如设备的插入和拔出等。如果Vold在设备发生变化之前已经建立了Netlink IPC通信,那么Vold可以接收到这些Uevent消息。这种情况是由设备发生变化而触发的。
- 设备一般在/sys对应的目录下有一个叫uevent的文件,往该文件中写入指定的数据,也会触Kernel发送和该设备相关的Uevent消息,这是由应用层触发的。例如Vold启动时,会往这些uevent文件中写数据,通过这种方式促使内核发送Uevent消息,这样Vold就能得到这些设备的当前信息了。
根据上面介绍可知,Netlink和Uevent的目的,就是让Vold随时获悉外部存储系统的信息,这至关重要。我们总不会希望发生诸如SD卡都被拔了,而Vold却一无所知的情况吧?
9.2.2 初识Vold
下面来认识一下Vold,它的代码在main.cpp中,如下所示:
Main.cpp
int main()
{VolumeManager *vm;CommandListener *cl;NetlinkManager *nm;SLOGI("Vold 2.1 (the revenge) firing up");//创建文件夹/dev/block/voldmkdir("/dev/block/vold", 0755);//①创建VolumeManager对象if(!(vm = VolumeManager::Instance())) {SLOGE("Unable to create VolumeManager");exit(1);};//②创建NetlinkManager对象if(!(nm = NetlinkManager::Instance())) {SLOGE("Unable to create NetlinkManager");exit(1);};//③创建CommandListener对象cl = new CommandListener();vm->setBroadcaster((SocketListener *) cl);nm->setBroadcaster((SocketListener *) cl);//④启动VMif(vm->start()) {......exit(1);}//⑤根据配置文件来初始化VMif(process_config(vm)) {......}//⑥启动NMif(nm->start()) {......exit(1);}//通过往/sys/block目录下对应的uevent文件写”add\n”来触发内核发送Uevent消息coldboot("/sys/block");{FILE *fp;char state[255];/*Android支持将手机上的外部存储设备作为磁盘挂载到电脑上。下面的代码可查看是否打开了磁盘挂载功能。这里涉及UMS(Usb Mass Storage,USB大容量存储)方面的知识。*/if((fp = fopen("/sys/devices/virtual/switch/usb_mass_storage/state", "r"))) {if (fgets(state, sizeof(state), fp)) {if (!strncmp(state, "online", 6)) {//⑧VM通过CL向感兴趣的模块(如MountService)通知UMS的状态vm->notifyUmsConnected(true);} else {vm->notifyUmsConnected(false);}}......fclose(fp);}......}......//⑨启动CLif(cl->startListener()) {......exit(1);}//无限循环while(1) {sleep(1000);}SLOGI("Vold exiting");exit(0);
}
上面代码中列出了九个关键点。由于Vold将其功能合理分配到了各个模块中,所以这九个关键点将放到图9-1所示Vold的三个模块中去讨论。
下面,看第一个模块NetlinkManager,简称NM。
9.2.3 NetlinkManager模块的分析
在Vold代码中,使用NM模块的流程是:
- 调用Instance创建一个NM对象。
- 调用setBroadcaster设置CL对象。
- 调用start启动NM。
接下来,按这三个步骤来分析NM模块。
1. 创建NM
Vold调用Instance函数创建了一个NM对象。看到Instance这个函数,读者应能想到,这里可能是采用了单例模式。来看是否如此,代码如下所示。
NetlinkManager.cpp
NetlinkManager *NetlinkManager::Instance() {if(!sInstance)sInstance = new NetlinkManager();//果然是单例模式returns Instance;
}
NM的创建真是非常简单。再看第二个被调用的函数setBroadcaster。
2. setBroadcaster的分析
setBroadcaster就更简单了,它的实现在NetlinkManger类的声明中,如下所示:
NetlinkManager.h
void setBroadcaster(SocketListener *sl) {mBroadcaster = sl; }
setBroadcaster参数中的那个sl其实际类型为CommandListener。需要说明的是,虽然NM设置了CL对象,但Vold的NM并没有通过CL发送消息和接收命令,所以在图9-1中,NM模块和CL模块并没有连接线,这一点务请注意。
下面看最后一个函数start。
3. start的分析
前面说过,NM模块将使用Netlink和Kernel进行IPC通信,那么它是怎么做到的呢?来看代码,如下所示:
NetlinkManager.cpp
int NetlinkManager::start()
{//PF_NETLINK使用的socket地址结构是sockaddr_nl,而不是一般的sockaddr_instruct sockaddr_nl nladdr;int sz = 64 * 1024;memset(&nladdr, 0, sizeof(nladdr));nladdr.nl_family = AF_NETLINK;nladdr.nl_pid = getpid(); //设置自己的进程pidnladdr.nl_groups = 0xffffffff;/*创建PF_NETLINK地址簇的socket,目前只支持SOCK_DGRAM类型,第三个参数NETLINK_KOBJECT_UEVENT表示要接收内核的Uevent事件。*/if((mSock = socket(PF_NETLINK, SOCK_DGRAM,NETLINK_KOBJECT_UEVENT)) < 0) {......return -1;}//设置Socket接收缓冲区大小if(setsockopt(mSock, SOL_SOCKET, SO_RCVBUFFORCE, &sz, sizeof(sz)) < 0) {......return -1;}//必须对该socket执行bind操作if(bind(mSock, (struct sockaddr *) &nladdr, sizeof(nladdr)) < 0) {......return -1;}//创建一个NetlinkHandler对象,并把创建好的Socket句柄传给它。mHandler = new NetlinkHandler(mSock);//调用NetlinkHandler对象的startif(mHandler->start()) {SLOGE("Unable to start NetlinkHandler: %s", strerror(errno));return -1;}return 0;
}
从代码上看,NM的start函数分为两个步骤:
- 创建地址簇为PF_NETLINK类型的socket并做一些设置,这样NM就能和Kernel通信了。关于Netlink的使用技巧网上有很多资料,读者可在Linux系统上通过man netlink命令来查询相关信息。
- 创建NetlinkHandler对象,并调用它的start。看来,后续工作都是由NetlinkHandler来完成的。
据上文分析可看出,NetlinkHandler才是真正的主角,下面就来分析它。为书写方便起见,NetlinkHandler简称为NLH。
4. NetlinkHandler的分析
(1)创建NLH
代码结构简单的Vold程序中,NetlinkHandler却有一个相对不简单的派生关系,如图9-2所示:

直接看代码,来认识这个NLH:
NetlinkHandler.cpp
NetlinkHandler::NetlinkHandler(int listenerSocket) : NetlinkListener(listenerSocket) //调用基类NetlinkListener的构造函数。注意传入的参数是和Kernel通信的socket//句柄。注意,文件描述符和句柄表示的是同一个东西,这里不再区分二者。
}
再看基类NetlinkListener的构造函数:
NetlinkListener.cpp
NetlinkListener::NetlinkListener(int socket) : SocketListener(socket, false) {//调用基类SocketListener的构造函数,第二个参数为false。
}
基类SocketListener的构造函数是:
SocketListener.cpp
SocketListener::SocketListener(int socketFd,bool listen) {mListen = listen; //这个参数是falsemSocketName = NULL;mSock = socketFd;//保存和Kernel通信的socket描述符//初始化一个mutex,看来会有多个线程存在pthread_mutex_init(&mClientsLock, NULL);/*SocketClientCollection的声明如下,它是一个列表容器。typedef android::List<SocketClient *>SocketClientCollection其中,SocketClient代表和Socket服务端通信的客户端。*/mClients = new SocketClientCollection();
}
NLH的创建分析完了。此过程中没有什么新鲜内容。下面看它的start函数。
本章内容会大量涉及Socket,所以读者应先了解与Socket有关的知识,如果需要深入研究,建议阅读《Unix NetworkingProgramming Volume I》①一书。
(2)start的分析
在分析前面的代码时,曾看到NetlinkHandler会创建一个同步互斥对象,这表明NLH会在多线程环境中使用,那么这个线程会在哪里创建呢?来看start的代码,如下所示:
NetlinkHandler.cpp
int NetlinkHandler::start() {returnthis->startListener();//startListener由SocketListener实现。
}
SocketListener.cpp
int SocketListener::startListener() {if(!mSocketName && mSock == -1) {errno = EINVAL;return -1;} elseif (mSocketName) {if((mSock = android_get_control_socket(mSocketName)) < 0) {return -1;}}/*还记得构造NLH时的参数嘛?mListen为false,这表明NLH不是监听端(listen)。这里为了代码和操作的统一,用mSock做参数构造了一个SocketClient对象,并加入到mClients列表中,但这个SocketClient并不是真实客户端的代表。*/if(mListen && listen(mSock, 4) < 0) {......return -1;} else if (!mListen)//以mSock为参数构造SocketClient对象,并加入到对应列表中mClients->push_back(new SocketClient(mSock));/*pipe系统调用将创建一个匿名管道,mCtrlPipe是一个int类型的二元数组。其中mCtrlPipe[0]用于从管道读数据,mCtrlPipe[1]用于往管道写数据*/if (pipe(mCtrlPipe)) {......return -1;}//创建一个工作线程,线程函数是threadStart。if(pthread_create(&mThread, NULL, SocketListener::threadStart, this)) {......return -1;}return 0;
}
如果熟悉Socket编程,理解上面的代码就非常容易了。下面来看NLH的工作线程。
(3)工作线程的分析
工作线程的线程函数threadStart的代码如下所示:
SocketListener.cpp
void *SocketListener::threadStart(void *obj)
{SocketListener *me = reinterpret_cast<SocketListener *>(obj);me->runListener();//调用runListener。pthread_exit(NULL);return NULL;
}//直接分析runListener
void SocketListener::runListener() {while(1) {SocketClientCollection::iterator it;fd_set read_fds;int rc = 0;int max = 0;FD_ZERO(&read_fds);if(mListen) {//mListen为false,所以不走这个if分支max = mSock;FD_SET(mSock, &read_fds);}/*计算max,为什么要有这个操作?这是由select函数决定的,它的第一个参数的取值必须为它所监视的文件描述符集合中最大的文件描述符加1。*/FD_SET(mCtrlPipe[0], &read_fds);if(mCtrlPipe[0] > max)max = mCtrlPipe[0];//还是计算fd值最大的那个pthread_mutex_lock(&mClientsLock);for (it = mClients->begin(); it != mClients->end(); ++it) {FD_SET((*it)->getSocket(), &read_fds);if ((*it)->getSocket() > max)max = (*it)->getSocket();}pthread_mutex_unlock(&mClientsLock);/*注意select函数的第一个参数,为max+1。读者可以通过man select来查询select的用法,注意,在Windows平台上的select对第一个参数没有要求。*/if((rc = select(max + 1, &read_fds, NULL, NULL, NULL)) < 0) {sleep(1);continue;} else if (!rc)continue;//如果管道可读的话,表示需要退出工作线程。if(FD_ISSET(mCtrlPipe[0], &read_fds))break;if (mListen && FD_ISSET(mSock, &read_fds)) {//如果是listen端的话,mSock可读表示有客户端connect上struct sockaddr addr;socklen_t alen = sizeof(addr);int c;//调用accept接受客户端的连接,返回用于和客户端通信的Socket描述符if ((c = accept(mSock, &addr, &alen)) < 0) {SLOGE("accept failed (%s)", strerror(errno));sleep(1);continue;}pthread_mutex_lock(&mClientsLock);//根据返回的客户端Socket描述符构造一个SocketClient对象,并加入到对应listmClients->push_back(new SocketClient(c));pthread_mutex_unlock(&mClientsLock);}do{pthread_mutex_lock(&mClientsLock);for (it = mClients->begin(); it !=mClients->end(); ++it) {int fd = (*it)->getSocket();if (FD_ISSET(fd, &read_fds)) {pthread_mutex_unlock(&mClientsLock);/*有数据通过Socket发送过来,所以调用onDataAvailable进行处理。如果在onDataAvailable返回false,表示需要关闭该连接。*/if (!onDataAvailable(*it)){close(fd);pthread_mutex_lock(&mClientsLock);delete *it;it =mClients->erase(it);pthread_mutex_unlock(&mClientsLock);}FD_CLR(fd, &read_fds);continue;}}pthread_mutex_unlock(&mClientsLock);} while (0);}
}
从代码中可看到:
- 工作线程退出的条件是匿名管道可读,但在一般情况下不需要它退出,所以可以忽略此项内容。
- 不论是服务端还是客户端,收到数据后都会调用onDataAvailable进行处理。
下面就来看NLH的数据处理。
(4)数据处理
根据前面的分析,收到数据后首先调用onDataAvailable函数进行处理,这个函数由NLH的基类NetlinkListener实现。代码如下所示:
NetlinkListener
bool NetlinkListener::onDataAvailable(SocketClient*cli)
{int socket = cli->getSocket();int count;/*调用recev接收数据,如果接收错误,则返回false,这样这个socket在上面的工作线程中就会被close。*/if((count = recv(socket, mBuffer, sizeof(mBuffer), 0)) < 0) {SLOGE("recv failed (%s)", strerror(errno));return false;}//new一个NetlinkEvent,并调用decode来解析接收到的Uevent数据NetlinkEvent *evt = new NetlinkEvent();if(!evt->decode(mBuffer, count)) {goto out;}//调用onEvent,并传递NetlinkEvent对象。onEvent(evt);
out:delete evt;
return true;
decode函数就是将收到的Uevent信息填充到一个NetlinkEvent对象中,例如Action是什么,SUBSYSTEM是什么等,以后处理Uevent时就不用再解析字符串了。
看onEvent函数,此函数是由NLH自己实现的,代码如下所示:
NetlinkHandler.cpp
void NetlinkHandler::onEvent(NetlinkEvent *evt){VolumeManager *vm = VolumeManager::Instance();constchar *subsys = evt->getSubsystem();if(!subsys) {return;}if (!strcmp(subsys, "block")) {vm->handleBlockEvent(evt); //调用VM的handleBlockEvent} elseif (!strcmp(subsys, "switch")) {vm->handleSwitchEvent(evt);//调用VM的handleSwitchEvent} else if (!strcmp(subsys, "battery")){//这两个事件和外部存储系统没有关系,所以不处理} elseif (!strcmp(subsys, "power_supply")) {}
}
NLH的工作已介绍完,下面总结一下NM模块的工作。
5. NM模块的总结
NM模块的功能就是从Kernel接收Uevent消息,然后转换成一个NetlinkEvent对象,最后会调用VM的处理函数来处理这个NetlinkEvent对象。
9.2.4 VolumeManager模块的分析
Vold使用VM模块的流程是:
- 调用Instance创建一个VM对象。
- 调用setBroadcaster设置CL对象,这个函数和NM的setBroadcaster一样,所以本节不再介绍它。
- 调用start启动VM。
- 调用process_config配置VM。
现在来看除setBroadcaster之外的三个函数。
1. 创建VM和start的分析
VM的创建及start函数都非常简单,代码如下所示。
VolumeManager.cpp
VolumeManager *VolumeManager::Instance() {if(!sInstance)sInstance = new VolumeManager();return sInstance;
}
可以看到,VM也采用了单例的模式,所以全进程只会存在一个VM对象。
下面看VM的start:
VolumeManager.cpp
int VolumeManager::start() {return 0;
}
start很简单,没有任何操作。
2. process_config的分析
process_config函数会根据配置文件配置VM对象,其代码如下所示:
Main.cpp
static int process_config(VolumeManager *vm) {FILE*fp;int n= 0;charline[255];//读取/etc/vold.fstab文件if(!(fp = fopen("/etc/vold.fstab", "r"))) {return -1;}while(fgets(line, sizeof(line), fp)) {char *next = line;char *type, *label, *mount_point;n++;line[strlen(line)-1] = '\0';if(line[0] == '#' || line[0] == '\0')continue;if(!(type = strsep(&next, " \t"))) {goto out_syntax;}if(!(label = strsep(&next, " \t"))) {goto out_syntax;}if(!(mount_point = strsep(&next, " \t"))) {goto out_syntax;}if(!strcmp(type, "dev_mount")) {DirectVolume *dv = NULL;char *part, *sysfs_path;if (!(part = strsep(&next, " \t"))) {......goto out_syntax;}if (strcmp(part, "auto") && atoi(part) == 0) {goto out_syntax;}if (!strcmp(part, "auto")) {//①构造一个DirectVolume对象dv = new DirectVolume(vm, label, mount_point, -1);} else {dv = new DirectVolume(vm, label, mount_point, atoi(part));}while((sysfs_path = strsep(&next, " \t"))) {//②添加设备路径if (dv->addPath(sysfs_path)) {......goto out_fail;}}//为VolumeManager对象增加一个DirectVolume对象vm->addVolume(dv);}......}......return -1;
}
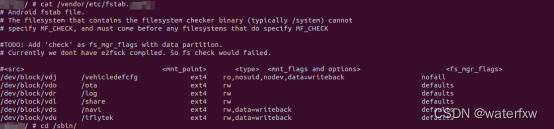
从上面代码中发现,process_config的主要功能就是解析/etc/vold.fstab。这个文件的作用和Linux系统中的fstab文件很类似,就是设置一些存储设备的挂载点,我的HTC G7手机上这个文件的内容如图9-3所示:

从上图的红框中可知:
- sdcard为volume的名字。
- /mnt/sdcard表示mount的位置。
- 1表示使用存储卡上的第一个分区,auto表示没有分区。现在有很多定制的ROM要求SD卡上存在多个分区。
- /devices/xxxx等内容表示MMC设备在sysfs中的位置。
根据G7的vold.fstab文件,可以构造一个DirectVolume对象。
注意,根据手机刷的ROM的不同,vold.fstab文件会有较大差异。
3. DirectVolume的分析
DirectVolume从Volume类派生,可把它看成是一个外部存储卡(例如一张SD卡)在代码中的代表物。它封装了对外部存储卡的操作,例如加载/卸载存储卡、格式化存储卡等。
下面是process_config函数中和DirectVolume相关的地方:
- 一个是创建DirectVolume。
- 另一个是调用DirectVolume的addpath函数。
它们的代码如下所示:
DirectVolume.cpp
DirectVolume::DirectVolume(VolumeManager *vm,const char *label,const char*mount_point, int partIdx) :Volume(vm, label, mount_point) {//初始化基类/*注意其中的参数:label为”sdcard”,mount_point为”/mnt/sdcard”,partIdx为1 */mPartIdx = partIdx;//PathCollection定义为typedef android::List<char *> PathCollection//其实就是一个字符串listmPaths= new PathCollection();for(int i = 0; i < MAX_PARTITIONS; i++)mPartMinors[i] = -1;mPendingPartMap = 0;mDiskMajor = -1; //存储设备的主设备号mDiskMinor = -1; //存储设备的次设备号,一个存储设备将由主次两个设备号标识。mDiskNumParts = 0;//设置状态为NoMediasetState(Volume::State_NoMedia);}//再来看addPath函数,它主要目的是添加设备在sysfs中的路径,G7的vold.fstab上有两个路//径,见图9-3中的最后一行。int DirectVolume::addPath(const char *path) {mPaths->push_back(strdup(path));return 0;
}
这里简单介绍一下addPath的作用。addPath把和某个存储卡接口相关的设备路径与这个DirectVolume绑定到一起,并且这个设备路径和Uevent中的DEVPATH是对应的,这样就可以根据Uevent的DEVPATH找到是哪个存储卡的DirectVolume发生了变动。当然手机上目前只有一个存储卡接口,所以Vold也只有一个DirectVolume。
4. NM和VM交互
在分析NM模块的数据处理时发现,NM模块接收到Uevent事件后,会调用VM模块进行处理,下面来看这块的内容。
先回顾一下NM调用VM模块的地方,代码如下所示:
NetlinkHandler.cpp
void NetlinkHandler::onEvent(NetlinkEvent *evt){VolumeManager *vm = VolumeManager::Instance();constchar *subsys = evt->getSubsystem();......if (!strcmp(subsys, "block")) {vm->handleBlockEvent(evt); //调用VM的handleBlockEvent} elseif (!strcmp(subsys, "switch")) {vm->handleSwitchEvent(evt);//调用VM的handleSwitchEvent
}
......
}
在上面代码中,如果Uevent是block子系统,则调用handleBlockEvent;如果是switch,则调用handleSwitchEvent。handleSwitchEvent主要处理SD卡挂载磁盘的通知,比较简单。这里只分析handleBlockEvent事件。
VolumeManager.cpp
void VolumeManager::handleBlockEvent(NetlinkEvent*evt) {constchar *devpath = evt->findParam("DEVPATH");/*前面在process_config中构造的DirectVolume对象保存在了mVolumes中,它的定义如下:typedef android::List<Volume *>VolumeCollection,也是一个列表。注意它保存的是Volume指针,而我们的DirectVolume是从Volume派生的*/VolumeCollection::iterator it;boolhit = false;for (it = mVolumes->begin(); it !=mVolumes->end(); ++it) {//调用每个Volume的handleBlockEvent事件,就我的G7手机而言,实际上将调用//DirectVolume的handleBlockEvent函数。if(!(*it)->handleBlockEvent(evt)) {hit = true;break;}}
}
NM收到Uevent消息后,DirectVolume也将应声而动,它的handleBlockEvent的处理是:
DirectVolume.cpp
int DirectVolume::handleBlockEvent(NetlinkEvent*evt) {constchar *dp = evt->findParam("DEVPATH");PathCollection::iterator it;//将Uevent的DEVPATH和addPath添加的路径进行对比,判断属不属于自己管理的范围。for(it = mPaths->begin(); it != mPaths->end(); ++it) {if(!strncmp(dp, *it, strlen(*it))) {int action = evt->getAction();const char *devtype = evt->findParam("DEVTYPE");if (action == NetlinkEvent::NlActionAdd) {int major = atoi(evt->findParam("MAJOR"));int minor = atoi(evt->findParam("MINOR"));char nodepath[255];snprintf(nodepath,sizeof(nodepath),"/dev/block/vold/%d:%d",major, minor);//创建设备节点if (createDeviceNode(nodepath, major, minor)) {......}if (!strcmp(devtype, "disk")) {handleDiskAdded(dp, evt);//添加一个磁盘} else {/*对于有分区的SD卡,先收到上面的“disk”消息,然后每个分区就会收到一个分区添加消息。*/handlePartitionAdded(dp,evt);}} else if (action == NetlinkEvent::NlActionRemove) {......} else if (action == NetlinkEvent::NlActionChange) {......}......return 0;}}errno = ENODEV;return -1;
}
关于DirectVolume针对不同Uevent的具体处理方式,后面将通过一个SD卡插入案例来分析。
5. VM模块的总结
从前面的代码分析中可知,VM模块的主要功能是管理Android系统中的外部存储设备。图9-4描述了VM模块的功能:

通过对上图和前面代码的分析可知:
- SD卡的变动(例如热插拔)将导致Kernel发送Uevent消息给NM模块。
- NM模块调用VM模块处理这些Uevent消息。
- VM模块遍历它所持有的Volume对象,Volume对象根据addPath添加的DEVPATH和Uevent消息中的DEVPATH来判断,自己是否可以处理这个消息。
至于Volume到底如何处理Uevent消息,将通过一个实例来分析。
9.2.5 关于 CommandListener模块的分析
Vold使用CL模块的流程是:
- 使用new创建一个CommandListener对象;
- 调用CL的startListener函数。
来看这两个函数。
1. 创建CommandListener的分析
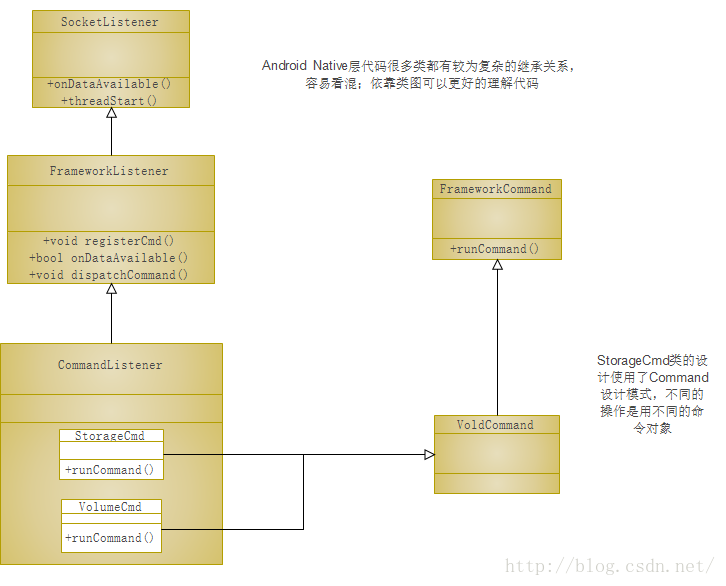
和NetlinkerHandler一样,CommandListener也有一个相对不简单的派生关系,它的家族图谱如图9-5所示:

根据上图可以知道:
- CL定义了一些和Command相关的内部类,这里采用了设计模式中的Command模式,每个命令的处理函数都是runCommand。注意,上图只列出了部分Command类。
- CL也是从SocketListener派生的,不过它是Socket的监听(listen)端。
下面看它的代码:
CommandListener.cpp
CommandListener::CommandListener() :FrameworkListener("vold") {//CL模块支持的命令registerCmd(new DumpCmd());registerCmd(new VolumeCmd());registerCmd(new AsecCmd());registerCmd(new ShareCmd());registerCmd(new StorageCmd());registerCmd(new XwarpCmd());
}
/*
registerCmd函数将Command保存到mCommands中,mCommands的定义为一个列表,如下:
typedef android::List<FrameworkCommand *>FrameworkCommandCollection;
*/
void FrameworkListener::registerCmd(FrameworkCommand *cmd) {mCommands->push_back(cmd);
}
从上面的代码可知,CommandListener的基类是FrameworkListener,而FrameworkListener又从SocketListener类派生。之前在分析NM模块的NetLinkerHandler时,已介绍过SocketListener相关的知识了,所以此处不再赘述,只总结一下CL创建后的结果,它们是:
- CL会创建一个监听端的socket,这样就可以接收客户端的链接。
- 客户端发送命令给CL,CL则从mCommands中找到对应的命令,并交给该命令的runCommand函数处理。
下面来关注第二个函数startListener,这个函数由SocketListener实现。
2. startListener的分析和数据处理
其实在分析NetlinkerHandler时,已经介绍了startListener函数,这里再简单回顾一下,有些具体内容和本章对NetlinkerHandler的分析有关。
SocketListener.cpp
int SocketListener::startListener()
{if(!mSocketName && mSock == -1) {......errno = EINVAL;return -1;} else if (mSocketName) {//mSOcketName为字符串“vold”。android_get_control_socket函数返回//对应的socket句柄if((mSock = android_get_control_socket(mSocketName)) < 0) {......return -1;}}//CL模块是监听端if(mListen && listen(mSock, 4) < 0) {......return -1;} elseif (!mListen)mClients->push_back(new SocketClient(mSock));if(pipe(mCtrlPipe)) {......return -1;}//创建工作线程threadStartif(pthread_create(&mThread, NULL, SocketListener::threadStart, this)) {return -1;}return 0;
}
当CL收到数据时,会调用onDataAvailable函数,它由FrameworkListener实现。
FrameworkListener.cpp
boolFrameworkListener::onDataAvailable(SocketClient *c)
{char buffer[255];int len;//读取数据if((len = read(c->getSocket(), buffer, sizeof(buffer) -1)) < 0) {......return errno;} elseif (!len)return false;int offset = 0;int i;for (i= 0; i < len; i++) {if(buffer[i] == '\0') {//分发命令,最终会调用对应命令对象的runCommand进行函数处理。dispatchCommand(c, buffer + offset);offset = i + 1;}}return true;
}
dispatchCommand最终会根据收到的命令名(如“Volume”,“Share”等)来调用对应的命令对象(如VolumeCmd,ShareCmd)的runCommand函数以处理请求。这一块非常简单,这里就不再详述了。
3. CL模块的总结
CL模块的主要工作是:
- 建立一个监听端的socket。
- 接收客户端的连接和请求,并调用对应Command对象的runComand函数处理。
目前,CL模块唯一的客户端就是MountService。来看看它。
9.2.6 Vold实例的分析
这一节将分析一个实际案例,即插入一张SD卡引发的事件及其处理过程。在分析之前,还是应先介绍MountService。
1. MountService的介绍
有些应用程序需要检测外部存储卡的插入/拔出事件,这些事件是由MountService通过Intent广播发出的,例如外部存储卡插入后,MountService就会发送ACTION_MEDIA_MOUNTED消息。从某种意义上说,可把MountService看成是Java世界的Vold。来简单认识一下这个MountService,它的代码如下所示:
MountService.java
class MountService extends IMountService.Stub implements INativeDaemonConnectorCallbacks {//MountService实现了INativeDaemonConnectorCallbacks接口......public MountService(Context context) {mContext = context;......//创建一个HandlerThread,在第5章中曾介绍过。mHandlerThread = new HandlerThread("MountService");mHandlerThread.start();/*创建一个Handler,这个Handler使用HandlerThread的Looper,也就是说,派发给该Handler的消息将在另外一个线程中处理。可回顾第5章的内容,以加深印象。*/mHandler = new MountServiceHandler(mHandlerThread.getLooper());....../*NativeDaemonConnector用于Socket通信,第二个参数“vold”表示将和Vold通信,也就是和CL模块中的那个socket建立通信连接。第一个参数为INativeDaemonConnectorCallbacks接口。它提供两个回调函数:onDaemonConnected:当NativeDaemonConnector连接上Vold后回调。onEvent:当NativeDaemonConnector收到来自Vold的数据后回调。*/mConnector = new NativeDaemonConnector(this, "vold", 10, "VoldConnector");mReady= false;//再启动一个线程用于和Vold通信。Threadthread = new Thread(mConnector,NativeDaemonConnector.class.getName());thread.start();}......
}
MountService通过NativeDaemonConnector和Vold的CL模块建立通信连接,这部分内容比较简单,读者可自行研究。下面来分析SD卡插入后所引发的一连串处理。
2. 设备插入事件的处理
(1)Vold处理Uevent事件
在插入SD卡后,Vold的NM模块接收到Uevent消息,假设此消息的内容是前面介绍Uevent知识时使用的add消息,它的内容如下所示:
SD卡插入的Uevent消息
add@/devices/platform/msm_sdcc.2/mmc_host/mmc1/mmc1:c9f2/block/mmcblk0
ACTION=add //add表示设备插入动作,另外还有remove和change等动作
//DEVPATH表示该设备位于/sys目录中的设备路径
DEVPATH=/devices/platform/msm_sdcc.2/mmc_host/mmc1/mmc1:c9f2/block/mmcblk0
/*
SUBSYSTEM表示该设备属于哪一类设备,block为块设备,磁盘也属于这一类设备,另外还有
character(字符)设备等类型。
*/
SUBSYSTEM=block
MAJOR=179//MAJOR和MINOR分别表示该设备的主次设备号,二者联合起来可以标识一个设备
MINOR=0
DEVNAME=mmcblk0
DEVTYPE=disk//设备Type为disk
NPARTS=3 //表示该SD卡上的分区,我的SD卡上有三块分区
SEQNUM=1357//序号
根据前文分析可知,NM模块中的NetlinkHandler会处理此消息,请回顾一下相关代码:
NetlinkHandler.cpp
void NetlinkHandler::onEvent(NetlinkEvent *evt)
{VolumeManager *vm = VolumeManager::Instance();constchar *subsys = evt->getSubsystem();......//根据上面Uevent消息的内容可知,它的subsystem对应为block,所以我们会走下面这个if分支if (!strcmp(subsys, "block")) {vm->handleBlockEvent(evt); //调用VM的handleBlockEvent}......
}
VolumeManager.cpp
void VolumeManager::handleBlockEvent(NetlinkEvent *evt) {const char *devpath = evt->findParam("DEVPATH");VolumeCollection::iterator it;boolhit = false;for(it = mVolumes->begin(); it != mVolumes->end(); ++it) {//调用各个Volume的handleBlockEventif(!(*it)->handleBlockEvent(evt)) {hit = true;break;}}......
}
我的G7手机只有一个Volume,其实际类型就是之前介绍过的DirectVolume。请看它是怎么对待这个Uevent消息的,代码如下所示:
DirectVolume.cpp
int DirectVolume::handleBlockEvent(NetlinkEvent*evt)
{constchar *dp = evt->findParam("DEVPATH");PathCollection::iterator it;for(it = mPaths->begin(); it != mPaths->end(); ++it) {if(!strncmp(dp, *it, strlen(*it))) {int action = evt->getAction();const char *devtype =evt->findParam("DEVTYPE");if (action == NetlinkEvent::NlActionAdd) {int major = atoi(evt->findParam("MAJOR"));int minor = atoi(evt->findParam("MINOR"));char nodepath[255];snprintf(nodepath,sizeof(nodepath),"/dev/block/vold/%d:%d",major, minor);//内部调用mknod函数创建设备节点if (createDeviceNode(nodepath, major, minor)) {SLOGE("Error makingdevice node '%s' (%s)", nodepath,strerror(errno));}if (!strcmp(devtype, "disk")) {//对应Uevent消息的DEVTYPE值为disk,所以走这个分支handleDiskAdded(dp, evt);} else {//处理DEVTYPE为Partition的情况handlePartitionAdded(dp,evt);}} else if (action == NetlinkEvent::NlActionRemove) {//对应Uevent的ACTION值为remove......} else if (action == NetlinkEvent::NlActionChange) {//对应Uevent的ACTION值为change......}......return 0;}}errno = ENODEV;return -1;
}
插入SD卡,首先收到的Uevent消息中DEVTYPE的值是“disk”,这将导致DirectVolume的handleDiskInserted被调用。下面来看它的工作。
DirectVolume.cpp
void DirectVolume::handleDiskAdded(const char*devpath, NetlinkEvent *evt) {mDiskMajor = atoi(evt->findParam("MAJOR"));mDiskMinor = atoi(evt->findParam("MINOR"));constchar *tmp = evt->findParam("NPARTS");if(tmp) {mDiskNumParts = atoi(tmp);//这个disk上的分区个数。} else{......mDiskNumParts = 1;}char msg[255];int partmask = 0;int i;/*Partmask会记录这个Disk上分区加载的情况,前面曾介绍过,如果一个Disk有多个分区,它后续则会收到多个分区的Uevent消息。*/for (i= 1; i <= mDiskNumParts; i++) {partmask |= (1 << i);}mPendingPartMap = partmask;if(mDiskNumParts == 0) {......//如果没有分区,则设置Volume的状态为Idle。setState(Volume::State_Idle);} else {......//如果还有分区未加载,则设置Volume状态为PendingsetState(Volume::State_Pending);}/*设置通知内容,snprintf调用完毕后msg的值为:“Volume sdcard/mnt/sdcard disk inserted (179:0)”*/snprintf(msg, sizeof(msg), "Volume %s %s disk inserted(%d:%d)",getLabel(), getMountpoint(), mDiskMajor, mDiskMinor);/*getBroadcaster函数返回setBroadcaster函数设置的那个Broadcaster,也就是CL对象。然后调用CL对象的sendBroadcast给MountService发送消息,注意它的第一个参数是ResponseCode::VolumeDiskInserted。*/mVm->getBroadcaster()->sendBroadcast(ResponseCode::VolumeDiskInserted, msg, false);
}
handleDiskAdded把Uevent消息做一些转换后发送给了MountService,实际上可认为CL模块和MountService通信使用的是另外一套协议。那么,MountService会做什么处理呢?
(2)MountService的处理
MountService.java onEvent函数
public boolean onEvent(int code, String raw, String[] cooked) {Intent in = null;//关于onEvent函数,MountService的介绍中曾提过,当NativeDaemonConnector收到//来自vold的数据后都会调用这个onEvent函数。......if(code == VoldResponseCode.VolumeStateChange) {......}else if (code == VoldResponseCode.ShareAvailabilityChange) {......}else if ((code == VoldResponseCode.VolumeDiskInserted) ||(code ==VoldResponseCode.VolumeDiskRemoved) ||(code ==VoldResponseCode.VolumeBadRemoval)) {final String label = cooked[2]; //label值为”sdcard”final String path = cooked[3]; //path值为”/mnt/sdcard”int major = -1;int minor = -1;try {String devComp = cooked[6].substring(1, cooked[6].length() -1);String[] devTok = devComp.split(":");major = Integer.parseInt(devTok[0]);minor = Integer.parseInt(devTok[1]);} catch (Exception ex) {......}if (code == VoldResponseCode.VolumeDiskInserted) {//收到handleDiskAdded发送的VolumeDiskInserted消息了//然后单独启动一个线程来处理这个消息。new Thread() {public void run() {try {int rc;//调用doMountVolume处理。if ((rc =doMountVolume(path)) != StorageResultCode.OperationSucceeded) {}} catch (Exception ex){......}}}.start();}
doMountVolume函数的代码如下所示:
MountService.java
private int doMountVolume(String path) {int rc = StorageResultCode.OperationSucceeded;try {//通过NativeDaemonConnector给Vold发送请求,请求内容为://volume mount /mnt/sdcardmConnector.doCommand(String.format("volume mount %s", path));}catch (NativeDaemonConnectorException e) {......//异常处理}
走了一大圈,最后又回到Vold了。CL模块将收到这个来自MountService的请求,请求的内容为字符串“volume mount/mnt/sdcard”,其中的volume表示命令的名字,CL会根据这个名字找到VolumeCmd对象,并交给它处理这个命令。
(3)Vold处理MountService的命令
Vold处理MountService命令的代码如下所示:
CommandListener.cpp VolumeCmd类
intCommandListener::VolumeCmd::runCommand(SocketClient *cli, int argc, char **argv) {......VolumeManager *vm = VolumeManager::Instance();int rc= 0;if(!strcmp(argv[1], "list")) {return vm->listVolumes(cli);} elseif (!strcmp(argv[1], "debug")) {......} elseif (!strcmp(argv[1], "mount")) {......//调用VM模块的mountVolume来处理mount命令,参数是“/mnt/sdcard”rc= vm->mountVolume(argv[2]);} elseif (!strcmp(argv[1], "unmount")) {......rc= vm->unmountVolume(argv[2], force);} elseif (!strcmp(argv[1], "format")) {......rc = vm->formatVolume(argv[2]);} elseif (!strcmp(argv[1], "share")) {......rc= vm->shareVolume(argv[2], argv[3]);} elseif (!strcmp(argv[1], "unshare")) {......rc= vm->unshareVolume(argv[2], argv[3]);}......if(!rc) {//发送处理结果给MountServicecli->sendMsg(ResponseCode::CommandOkay, "volume operationsucceeded", false);}......return 0;
}
看mountVolume函数:
VolumeManager.cpp
int VolumeManager::mountVolume(const char*label) {/*根据label找到对应的Volume。label这个参数的名字含义上有些歧义,根据loopupVolume的实现来看,它其实比较的是Volume的挂载路径,也就是vold.fstab中指定的那个/mnt/sdcard。而vold.fstab中指定的label叫sdcard。*/Volume*v = lookupVolume(label);......return v->mountVol();//mountVol由Volume类实现。
}
找到对应的DirectVolume后,也就找到了代表真实存储卡的对象。它是如何处理这个命令的呢?代码如下所示:
Volume.cpp
int Volume::mountVol() {dev_t deviceNodes[4];int n,i, rc = 0;char errmsg[255];......//getMountpoint返回挂载路径,即/mnt/sdcard//isMountpointMounted判断这个路径是不是已经被mount了if(isMountpointMounted(getMountpoint())) {setState(Volume::State_Mounted);//设置状态为State_Mountedreturn 0;//如果已经被mount了,则直接返回}n =getDeviceNodes((dev_t *) &deviceNodes, 4);......for (i= 0; i < n; i++) {char devicePath[255];sprintf(devicePath, "/dev/block/vold/%d:%d",MAJOR(deviceNodes[i]),MINOR(deviceNodes[i]));......errno = 0;setState(Volume::State_Checking);//默认SD卡为FAT分区,只有这样,当加载为磁盘的时候才能被Windows识别。if(Fat::check(devicePath)) {......return -1;}/*先把设备mount到/mnt/secure/staging,这样/mnt/secure/staging下的内容就是该设备的存储内容了*/errno = 0;if(Fat::doMount(devicePath, "/mnt/secure/staging", false, false, 1000, 1015, 0702,true)) {......continue;}/*下面这个函数会把存储卡中的autorun.inf文件找出来并删掉,这个文件就是“臭名昭著”的自动运行文件,在Windows系统上,把SD卡挂载为磁盘后,双击这个磁盘就会自动运行这个文件,很多病毒和木马都是通过它传播的。为了安全起见,要把这个文件删掉。*/protectFromAutorunStupidity();//①下面这个函数比较有意思,需要看看:if(createBindMounts()) {......return -1;}//将存储卡mount路径从/mnt/secure/staging移到/mnt/sdcardif(doMoveMount("/mnt/secure/staging", getMountpoint(), false)) {......return -1;}//②设置状态为State_Mounted,这个函数将发送状态信息给MountServicesetState(Volume::State_Mounted);mCurrentlyMountedKdev = deviceNodes[i];return 0;}......setState(Volume::State_Idle);return -1;
}
上面代码中有个比较有意思的函数,就是createBindMounts,其代码如下所示:
Volume.cpp
int Volume::createBindMounts() {unsigned long flags;/*将/mnt/secure/staging/android_secure目录名改成/mnt/secure/staging/.android_secure,SEC_STG_SECIMGDIR的值就是/mnt/secure/staging/.android_secure,也就是把它变成Linux平台上的隐藏目录*/if(!access("/mnt/secure/staging/android_secure", R_OK | X_OK)&&access(SEC_STG_SECIMGDIR, R_OK | X_OK)) {if(rename("/mnt/secure/staging/android_secure", SEC_STG_SECIMGDIR)) {SLOGE("Failed to rename legacy asec dir (%s)",strerror(errno));}}....../*使用mount命令的bind选项,可将/mnt/secure/staging/.android_secure这个目录挂载到/mnt/secure/asec目录下。/mnt/secure/asec目录是一个secure container,目前主要用来保存一些安装在SD卡上的APP信息。APP2SD是Android 2.2引入的新机制,它支持将APP安装在SD卡上,这样可以节约内部的存储空间。mount的bind选项允许将文件系统的一个目录挂载到另外一个目录下。读者可以通过man mount查询具体信息。*/if(mount(SEC_STG_SECIMGDIR, SEC_ASECDIR, "", MS_BIND, NULL)) {......return -1;}....../*将tempfs设备挂载到/mnt/secure/staging/.android_secure目录,这样之前.android_secure目录中的内容就只能通过/mnt/secure/asec访问了。由于那个目录只能由root访问,所以可以起到安全和保护的作用。*/if(mount("tmpfs", SEC_STG_SECIMGDIR, "tmpfs", MS_RDONLY,"size=0,mode=000,uid=0,gid=0")){......umount("/mnt/asec_secure");return -1;}return 0;
}
createBindMounts的作用就是将存储卡上的.android_secure目录挂载到/mnt/secure/asec目录下,同时对.android_secure进行一些特殊处理,这样,没有权限的用户就不能更改或破坏.android_secure目录中的内容了,因此它起到了一定的保护作用。
在手机上,受保护的目录内容,只能在用adb shell登录后,进入/mnt/secure/asec目录来查看。注意,这个asec目录的内容就是.android_secure未挂载tmpfs时的内容(亦即它保存着那些安装在存储卡上的应用程序的信息)。另外,可把SD卡拔出来,通过读卡器直接插到台式机上,此时,这些信息就能在.android_secure目录中被直接看到了。
(4)MountService处理状态通知
volume的mountVol完成相关工作后,就通过下面的函数,发送信息给MountService:
setState(Volume::State_Mounted); //感兴趣的读者可自行分析此函数的实现。
MountService依然会在onEvent函数中收到这个消息。
MountService.java
public boolean onEvent(int code, String raw,String[] cooked) {Intent in = null;......if(code == VoldResponseCode.VolumeStateChange) {/*状态变化由notifyVolumeStateChange函数处理,由于Volume的状态被置成Mounted,所以下面这个notifyVolumeStateChange会发送ACTION_MEDIA_MOUNTED这个广播。我们就不再分析这个函数了,读者可自行研究。*/notifyVolumeStateChange(cooked[2], cooked[3],Integer.parseInt(cooked[7]),Integer.parseInt(cooked[10]));}
实例分析就到这里。中间略去了一些处理内容,例如对分区的处理等,读者可自行研读,相信已没有太大难度了。另外,在上述处理过程中,稍微难懂的是mountVol这个函数在挂载方面的处理过程。用图9-6来总结一下这个处理过程:
图9-6 SD卡插入事件处理流程图
由上图可知,Vold在安全性上还是做了一定考虑的。如果没有特殊需要,读者了解上面这些知识也就够了。
9.2.7 Vold总结
Vold和MountService之间的通信使用了Socket。之前在第6章介绍Binder时也提到过它。除了Binder外,Socket是Android系统中最常用的IPC通信机制了。本章介绍的Vold和Rild都是使用Socket进行IPC通信的。
Vold及Java层的MountService都比较简单,所以我在工作中碰到这两位出问题的几率基本为零。虽然二者比较简单,这里还是要提个小小的问题,以帮助大家加深印象:
当SD卡拔出,或者挂载到磁盘上时,都会导致sd卡被卸载,在这个切换过程中,有一些应用程序会被系统kill掉,这是为什么?
请读者阅读相关代码寻找答案,这样或许能解释很多测试人员在做测试时提出这种Bug的原因了:为什么SD卡mount到电脑后,有些应用程序突然退出了?
9.3 Rild的的原理与机制分析
这里,先回顾一下智能手机的架构。目前,很多智能手机的硬件架构都是两个处理器:一个处理器用来运行操作系统,上面可以跑应用程序,这个处理器称作Application Processor,简称AP;另一个处理器负责和射频无线通信相关的工作,叫Baseband Processor,简称BP。AP和BP芯片之间采用串口进行通信,通信协议使用的是AT指令。
什么是AT指令呢?AT指令最早用在Modem上,后来几大手机厂商如摩托罗拉、爱立信、诺基亚等为GSM通信又设计了一整套AT指令。AT指令的格式比较简单,是一个以AT开头,后跟字母和数字表示具体功能的字符串。了解具体的AT指令,可参考相关的规范参考或手机厂商提供的手册,这里就不再多说了。
在Android系统中,Rild运行在AP上,它是AP和BP在软件层面上通信的中枢,也就是说,AP上的应用程序将通过Rild发送AT指令给BP,而BP的信息通过Rild传送给AP上的应用程序。
现介绍在Rild代码中常会碰到的两个词语:
- 第一个solicited Respose,即经过请求的回复。它代表的应用场景是AP发送一个AT请求指令给BP进行处理,处理后,BP会对应回复一个AT指令告知处理结果。这个回复指令是针对之前的那个请求指令的,此乃一问一答式,所以叫solicitedResponse。
- 第二个unsolicited Response,即未经请求的回复。很多时候,BP主动给AP发送AT指令,这种指令一般是BP通知AP当前发生的一些事情,例如一路电话打了过来,或者网络信号中断等。从AP的角度来看,这种指令并非由它发送的请求所引起的,所以称之为unsolicited Response。
上面这两个词语,实际指明了AP和BP两种交互类型:
- AP发送请求BP,BP响应并回复AP。
- BP发送通知给AP。
这两种类型对软件而言有什么意义呢?先来看Rild在软件架构方面遇到的挑战:
- 有很多把AP和BP集成在一块芯片上的智能手机,它们之间的通信可能就不是AT指令了。
- 另外,即使AP和BP通信使用的是AT指令,不同的手机厂商在AT指令上也会有很大的不同,而且这些都属于商业秘密,所以手机厂商不可能共享源码,它只能给出二进制的库。
Rild是怎么解决这个问题的呢?结合前面提到的AP/BP交互的两种类型,大体可以勾画出图9-7:
图9-7 Rild解决问题的方法
从上图中可以看出:
- Rild会动态加载厂商相关的动态库,这个动态库加载在Linux平台上则使用dlopen系统调用。
- Rild和动态库之间通过接口进行通信,也就是说Rild输出接口供动态库使用,而动态库也输出对应的接口供Rild使用。
- AP和BP交互的工作由动态库去完成。
Rild和动态库运行在同一个进程上,为了方便理解,可把这两个东西分离开来。
根据上面的分析可知,对Rild的分析包括两部分:
- 对Rild本身的分析。
- 对动态库的分析。Android提供了一个用作参考的动态库叫libReference_ril.so,这个库实现了一些标准的AT指令。另外,它的代码结构也颇具参考价值,所以我们的动态库分析就以它为主。
分析Rild时,为书写方便起见,将这个动态库简称为RefRil库。
9.3.1 初识Rild
Rild的代码在Rild.c中,它是一个应用程序。从它的main开始分析,代码如下所示:
Rild.c
int main(int argc, char **argv)
{//动态库的位置由rilLibPath决定constchar * rilLibPath = NULL;char** rilArgv;void* dlHandle;/*Rild规定动态库必须实现一个叫Ril_init函数,这个函数的第一个参数指向结构体RIL_Env,而它的返回值指向结构体RIL_ RadioFunctions。这两个结构体就是在图9-7中提到的接口。这两个接口的具体内容,后文再做分析。*/constRIL_RadioFunctions *(*rilInit)(const struct RIL_Env *, int, char **);constRIL_RadioFunctions *funcs;charlibPath[PROPERTY_VALUE_MAX];unsigned char hasLibArgs = 0;int i;//Rild由init启动,没有对应的启动参数,所以这个for循环不会进来。for (i= 1; i < argc ;) {if(0 == strcmp(argv[i], "-l") && (argc - i > 1)) {rilLibPath = argv[i + 1];i += 2;} else if (0 == strcmp(argv[i], "--")) {i++;hasLibArgs = 1;break;} else {usage(argv[0]);}}if(rilLibPath == NULL) {/*读取系统属性,LIB_PATH_PROPERTY的值为"rild.libpath“,模拟器上和RIL相关的属性值有两个,分别是:rild.libpath=/system/lib/libreference-ril.sorild.libargs=-d /dev/ttyS0上面这些值都定义在build/target/board/generic/system.prop文件中不同厂商可以有自己对应的实现。*/if( 0 == property_get(LIB_PATH_PROPERTY, libPath, NULL)) {goto done;} else {/*这里,使用参考的动态库进行分析,它的位置为/system/lib/libreference-ril.so。*/rilLibPath = libPath;}}...... //和模拟器相关的一些内容switchUser();//设置Rild的组用户为radio//通过dlopen系统加载动态库dlHandle = dlopen(rilLibPath, RTLD_NOW);......//① 启动EventLoop,事件处理RIL_startEventLoop();//得到RefRil库中RIL_Init函数的地址rilInit= (const RIL_RadioFunctions *(*)(const struct RIL_Env *, int,char **))dlsym(dlHandle, "RIL_Init");......rilArgv[0]= argv[0];//②调用RefRil库输出的RIL_Init函数,注意传入的第一个参数和它的返回值。funcs= rilInit(&s_rilEnv, argc, rilArgv);//③注册上面rilInit函数的返回值(一个RIL_RadioFunctions类型的结构体)到Rild中。RIL_register(funcs);
done:while(1) {//主线程sleep,具体工作交给工作线程完成。sleep(0x00ffffff);}
}
将上面的代码和分析结合起来,就知道了Rild解决问题的方法,代码中列出了三个关键点。我们将逐一对其进行分析。
9.3.2 RIL_startEventLoop的分析
第一个关键点是RIL_startEventLoop函数,这个函数实际上是由libRil.so实现的,它的代码在Ril.cpp中,代码如下所示:
Ril.cpp
extern "C" void RIL_startEventLoop(void){int ret;pthread_attr_t attr;s_started= 0;pthread_mutex_lock(&s_startupMutex);pthread_attr_init (&attr);pthread_attr_setdetachstate(&attr,PTHREAD_CREATE_DETACHED);//创建工作线程eventLoopret =pthread_create(&s_tid_dispatch, &attr, eventLoop, NULL);/*工作线程eventLoop运行后会设置s_started为1,并触发s_startupCond。这几个语句的目的是保证在RIL_startEventLoop返回前,工作线程一定是已经创建并运行了*/while(s_started == 0) {pthread_cond_wait(&s_startupCond, &s_startupMutex);}pthread_mutex_unlock(&s_startupMutex);if(ret < 0) {return;}
}
从上面代码中可知,RIL_startEventLoop会等待工作线程创建并运行成功。这个线程为什么会如此重要呢?下面就来了解一下工作线程eventLoop。
1. 工作线程eventLoop
工作线程eventLoop的代码如下所示:
Ril.cpp
static void * eventLoop(void *param) {int ret;int filedes[2];//①初始化请求队列ril_event_init();//下面这几个操作告诉RIL_startEventLoop函数本线程已经创建并成功运行了。pthread_mutex_lock(&s_startupMutex);s_started = 1;pthread_cond_broadcast(&s_startupCond);pthread_mutex_unlock(&s_startupMutex);//创建匿名管道ret =pipe(filedes);......s_fdWakeupRead = filedes[0];s_fdWakeupWrite = filedes[1];//设置管道读端口的属性为非阻塞fcntl(s_fdWakeupRead, F_SETFL, O_NONBLOCK);//②下面这两句话将匿名管道的读写端口加入到event队列中。ril_event_set (&s_wakeupfd_event, s_fdWakeupRead, true,processWakeupCallback, NULL);rilEventAddWakeup (&s_wakeupfd_event);//③进入事件等待循环中,等待外界触发事件并做对应的处理。ril_event_loop();return NULL;
}
工作线程的工作并不复杂,主要有三个关键点。
(1)ril_event_init的分析
工作线程,顾名思义就是用来干活的。要让它干活,是否得有一些具体的任务呢?它是如何管理这些任务的呢?对这两问题的回答是:
- 工作线程使用了一个叫ril_event的结构体,来描述一个任务,并且它将多个任务按时间顺序组织起来,保存在任务队列中。这个时间顺序是指该任务的执行时间,由外界设定,可以是未来的某时间。
ril_event_init函数就是用来初始化相关队列和管理结构的,代码如下所示:
在代码中,“任务”也称为“事件”,如没有特殊说明必要,这两者以后不再做区分。
Ril.cpp
void ril_event_init()
{MUTEX_INIT();//初始化一个mutex对象listMutexFD_ZERO(&readFds);//初始化readFds,看来Ril会使用select来做多路IO复用//下面的timer_list和pending_list分别是两个队列init_list(&timer_list);//初始化timer_list,任务插入的时候按时间排序init_list(&pending_list);//初始化pendling_list,保存每次需要执行的任务/*watch_table(监控表)定义如下:static struct ril_event * watch_table[MAX_FD_EVENTS];其中MAX_FD_EVENTS的值为8。监控表主要用来保存那些FD已经加入到readFDs中的任务。*/memset(watch_table, 0, sizeof(watch_table));
}
此ril_event_init函数没什么新鲜的内容。任务在代码中的对等物Ril_event结构的代码,如下所示:
Ril_event.h
struct ril_event {struct ril_event *next;struct ril_event *prev;//next和prev将ril_event组织成了一个双向链表int fd; //该任务对应的文件描述符,以后简称FD。int index; //这个任务在监控表中的索引/*是否永久保存在监控表中,一个任务处理完毕后将根据这个persist参数来判断是否需要从监控表中移除。*/bool persist; struct timeval timeout; //该任务的执行时间ril_event_cb func; //任务函数void* param; //传给任务函数的参数
};
ril_event_init刚初始化完任务队列,下面就有地方添加任务了。
(2)任务加入队列
下面这两行代码初始化一个FD为s_wakeupfd_event的任务,并将其加入到监控表中:
/*s_wakeupfd_event定义为一个静态的ril_event,ril_event_set函数将初始化它的FD为管道的读端,任务函数ril_event_cb对应为processWakeupCallback,并设置persist为true
*/
ril_event_set (&s_wakeupfd_event, s_fdWakeupRead,true,processWakeupCallback, NULL);
//来看这个函数:
rilEventAddWakeup (&s_wakeupfd_event);
rilEventAddWakeup比较有意思,来看这个函数;
Ril.cpp
static void rilEventAddWakeup(struct ril_event*ev) {ril_event_add(ev);//ev指向一条任务triggerEvLoop();
}
//直接看ril_event_add函数和triggerEvLoop函数。
void ril_event_add(struct ril_event * ev)
{......MUTEX_ACQUIRE();//锁保护for (int i =0; i < MAX_FD_EVENTS; i++) {//从监控表中找到第一个空闲的索引,然后把这个任务加到监控表中,//index表示这个任务在监控中的索引if(watch_table[i] == NULL) {watch_table[i] = ev;ev->index = i;......//将任务的FD加入到readFds中,这是select使用的标准方法FD_SET(ev->fd, &readFds);if (ev->fd >= nfds) nfds = ev->fd+1;......break;}}MUTEX_RELEASE();......
}
//再来看triggerEvLoop函数,这个更简单了:
static void triggerEvLoop() {int ret;/*s_tid_dispatch是工作线程eventLoop的线程ID,pthread_self返回调用线程的线程ID。由于这里调用triggerEvLoop的就是eventLoop自己,所以不会走if 分支。但是可以看看里面的内容。*/if(!pthread_equal(pthread_self(), s_tid_dispatch)) {do{//s_fdWakeupWrite为匿名管道的写端口,看来触发eventLoop工作的条件就是//往这个端口写一点数据了。ret = write (s_fdWakeupWrite, " ", 1);} while (ret < 0 && errno == EINTR);}
}
一般的线程间通信使用同步对象来触发,而rild是通过往匿名管道写数据来触发工作线程工作的。
(3)ril_event_loop的分析
来看最后一个关键函数ril_event_loop,其代码如下所示:
Ril.cpp
void ril_event_loop()
{int n;fd_set rfds;struct timeval tv;struct timeval * ptv;for(;;) {memcpy(&rfds, &readFds,sizeof(fd_set));/*根据timer_list来计算select函数的等待时间,timer_list已经按任务的执行时间排好序了。*/if(-1 == calcNextTimeout(&tv)) {ptv = NULL;}else {ptv = &tv;}......;//调用select进行多路IO复用n= select(nfds, &rfds, NULL, NULL, ptv);......//将timer_list中那些执行时间已到的任务移到pending_list队列。processTimeouts();//从监控表中转移那些有数据要读的任务到pending_list队列,如果任务的persisit不为//true,则同时从监控表中移除这些任务processReadReadies(&rfds, n);//遍历pending_list,执行任务的任务函数。firePending();}
}
根据对ril_event_Loop函数的分析可知,Rild支持两种类型的任务:
- 定时任务。它的执行由执行时间决定,和监控表没有关系,在Ril.cpp中由ril_timer_add函数添加。
- 非定时任务,也叫Wakeup Event。这些任务的FD将加入到select的读集合(readFDs)中,并且在监控表中存放了对应的任务信息。它们触发的条件是这些FD可读。对于管道和Socket来说,FD可读意味着接收缓冲区中有数据,这时调用recv不会因为没有数据而阻塞。
对于处于listen端的socket来说,FD可读表示有客户端连接上了,此时需要调用accept接受连接。
2. RIL_startEventLoop小结
总结一下RIL_startEventLoop的工作。从代码中看,这个函数将启动一个比较重要的工作线程eventLoop,该线程主要用来完成一些任务处理,而目前还没有给它添加任务。
9.3.3 RIL_Init的分析
下面看第二个关键函数RIL_Init。这个函数必须由动态库实现,对于下面这个例子来说,它将由RefRil库实现,这个函数定义在Reference_ril.c中:
Reference_ril.c
pthread_t s_tid_mainloop;//看来又会创建一个线程
//动态库必须实现的RIL_Init函数。
const RIL_RadioFunctions *RIL_Init(const structRIL_Env *env,
int argc, char **argv)
{int ret;int fd= -1;int opt;pthread_attr_t attr;s_rilenv = env; //将外部传入的env保存为s_rilenv。......//一些参数处理,不必管它pthread_attr_init (&attr);pthread_attr_setdetachstate(&attr,PTHREAD_CREATE_DETACHED);//创建一个工作线程mainLoopret =pthread_create(&s_tid_mainloop, &attr, mainLoop, NULL);/*s_callbacks也为一个结构体staticconst RIL_RadioFunctions s_callbacks = {RIL_VERSION, //RIL的版本onRequest, //下面是一些函数指针currentState,onSupports,onCancel,getVersion
};
*/return &s_callbacks;
}
RefRil的RIL_Init函数比较简单,主要有三项工作要做:
- 保存Rild传入的RIL_Env结构体。
- 创建一个叫mainLoop的工作线程。
- 返回一个RIL_RadioFunctions的结构体。
上面的RIL_Env和RIL_RadioFunctions结构体,就是Rild架构中用来隔离通用代码和厂商相关代码的接口。先来看RIL_RadioFunctions,这个结构体由厂商的动态库实现,它的代码如下:
//函数指针定义
typedef void (*RIL_RequestFunc) (int request,void *data,size_tdatalen, RIL_Token t);
typedef RIL_RadioState(*RIL_RadioStateRequest)();
typedef int (*RIL_Supports)(int requestCode);
typedef void (*RIL_Cancel)(RIL_Token t);
typedef void (*RIL_TimedCallback) (void *param);
typedef const char * (*RIL_GetVersion) (void);
typedef struct {int version; //RIL的版本//通过这个接口可向BP提交一个请求,注意这个函数的返回值为空,这是为什么?RIL_RequestFunc onRequest;RIL_RadioStateRequest onStateRequest;//查询BP的状态RIL_Supports supports;RIL_CancelonCancel;//查询动态库的版本,RefRil库中该函数的实现将返回字符串”android reference-ril 1.0”RIL_GetVersion getVersion;
} RIL_RadioFunctions;
对于上面的结构体,应重点关注函数onRequest,它被Rild用来向动态库提交一个请求,也就是说,AP向BP发送请求的接口就是它,但是这个函数却没有返回值,那么该请求的执行结果是怎么得到的呢?
这里不卖关子,直接告诉大家。Rild架构中最大的特点就是采用了异步请求/处理的方式。这种方式和异步I/O有异曲同工之妙。那么什么是异步请求/处理呢?它的执行流程如下:
- Rild通过onRequest向动态库提交一个请求,然后返回去做自己的事情。
- 动态库处理这个请求,请求的处理结果通过回调接口通知。
这种异步请求/处理的流程和酒店的MorningCall服务很类似,具体相似之处如下所示:
- 在前台预约了一个Morning Call,这好比向酒店提交了一个请求。预约完后,就可以放心地做自己的事情了。
- 酒店登记了这个请求,记录是哪个房间申请的服务,然后由酒店安排工作人员值班,这些都是酒店对这个请求的处理,作为房客则无须知道处理细节。
- 第二天早上,约好的时间一到,酒店给房客打电话,房客就知道这个请求被处理了。为了检查一下宾馆服务的效果,最好是拿表看看接到电话的时间是不是之前预约的时间。
这时,读者对异步请求/处理机制或许有了一些直观的感受。那么,动态库是如何通知请求的处理结果的呢?这里用到了另外一个接口RIL_Env结构,它的定义如下所示:
Ril.h
struct RIL_Env {
//动态库完成一个请求后,通过下面这个函数通知处理结果,其中第一个参数标明是哪个请求
//的处理结果void(*OnRequestComplete)(RIL_Token t, RIL_Errno e,void *response,size_t responselen);//动态库用于进行unsolicited Response通知的函数void(*OnUnsolicitedResponse)(int unsolResponse, const void *data,size_t datalen);//给Rild提交一个超时任务void*(*RequestTimedCallback) (RIL_TimedCallback callback,void *param,const struct timeval *relativeTime);//从Rild的超时任务队列中移除一个任务void(*RemoveTimedCallback) (void *callbackInfo);
};
结合图9-7和上面的分析可以发现,Rild在设计时将请求的应答接口和动态库的通知接口都放在了RIL_Env结构体中。
关于Rild和动态库的交互接口就分析到这里。相信读者已经明白其中的原理了。下面来看RefRil库创建的工作线程mainLoop。
1. 工作线程mainLoop的分析
RefRil库的RIL_Init函数会创建一个工作线程mainLoop,其代码如下所示:
Reference_Ril.c
static void *mainLoop(void *param)
{int fd;int ret;....../*为AT模块设置一些回调函数,AT模块用来和BP交互,对于RefRil库来说,AT模块就是对串口设备通信的封装,这里统称为AT模块。*/at_set_on_reader_closed(onATReaderClosed);at_set_on_timeout(onATTimeout);for(;;) {fd= -1;//下面这个while循环的目的是为了得到串口设备的文件描述符,我们省略其中的一些内容while (fd < 0) {if (s_port > 0) {fd = socket_loopback_client(s_port, SOCK_STREAM);} else if (s_device_socket) {if (!strcmp(s_device_path, "/dev/socket/qemud")) {......} else if (s_device_path != NULL) {fd = open (s_device_path, O_RDWR);if ( fd >= 0 && !memcmp( s_device_path,"/dev/ttyS", 9 ) ) {struct termios ios;tcgetattr( fd, &ios );ios.c_lflag = 0;tcsetattr( fd, TCSANOW,&ios );}}......}s_closed = 0;//①打开AT模块,传入一个回调函数onUnsolicitedret = at_open(fd, onUnsolicited);......//②下面这个函数向Rild提交一个超时任务,该任务的处理函数是initializeCallbackRIL_requestTimedCallback(initializeCallback,NULL, &TIMEVAL_0);sleep(1);/*如果AT模块被关闭,则waitForClose返回,但是该线程并不会退出,而是从for循环那开始重新执行一次。所以这个mainLoop工作线程是用来监控AT模块的,一旦它被关闭,就需要重新打开。也就是说不允许AT模块被关闭。
*/waitForClose();......}
}
可以看到,mainLoop的工作其实就是初始化AT模块,并监控AT模块,一旦AT模块被关闭,那么mainLoop就要重新打开并初始化它。这几项工作主要由at_open和超时任务的处理函数initializeCallback完成。
(1)at_open分析
来看at_open这个函数,其代码如下所示:
Atchannle.c
int at_open(int fd, ATUnsolHandler h)
{//at_open的第一个参数是一个代表串口设备的文件描述符。int ret;pthread_t tid;pthread_attr_t attr;s_fd =fd;s_unsolHandler = h;s_readerClosed = 0;s_responsePrefix = NULL;s_smsPDU = NULL;sp_response = NULL;......//和电源管理相关的操作pthread_attr_init (&attr);pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED);//创建一个工作线程readerLoop,这个线程的目的就是从串口设备读取数据ret =pthread_create(&s_tid_reader, &attr, readerLoop, &attr);......return 0;
}
at_open函数会另外创建一个工作线程readerLoop,从名字上看,它会读取串口设备。下面来看它的工作,代码如下所示:
Atchannle.c
static void *readerLoop(void *arg)
{for(;;) {const char * line;line = readline(); //从串口设备读取数据......if(isSMSUnsolicited(line)) {char *line1;const char *line2;line1 = strdup(line);line2 = readline();if (line2 == NULL) {break;}if (s_unsolHandler != NULL) {s_unsolHandler (line1, line2);//调用回调,处理SMS的通知}free(line1);}else {//处理接收到的数据,也就是根据line中的AT指令调用不同的回调processLine(line);}......//电源管理相关//这个线程退出前会调用通过at_set_on_reader_closed设置的回调函数,以通知//AT模块关闭onReaderClosed();return NULL;
}
readerLoop工作线程比较简单,就是从串口设备中读取数据,然后进行处理。这些数据有可能是solicited response,也有可能是unsolicited response,具体的处理函数我们在后续的实例分析中再来介绍,下面我们看第二个函数RIL_requestTimedCallback。
(2)initializeCallback的分析
在分析initializeCallback函数前,我们先看看RefRil向Rild提交超时任务的RIL_requestTimedCallback函数,它其实是一个宏,不过这个宏比较简单,就是封装了RIL_Env结构体中对RequestTimedCallback函数的调用,代码如下所示:
#define RIL_requestTimedCallback(a,b,c) \
s_rilenv->RequestTimedCallback(a,b,c)
//向Rild提交一个超时处理函数
下面我们看看Rild实现的这个RequestTimedCallback函数,代码如下所示。
Ril.cpp
extern "C" void *
RIL_requestTimedCallback (RIL_TimedCallbackcallback, void *param,const structtimeval *relativeTime) {return internalRequestTimedCallback (callback, param, relativeTime);
}
/*
调用internalRequestTimedCallback,其实就是构造一个Ril_event事件然后加入到
timer_list,并触发event_loop工作线程执行
*/
static UserCallbackInfo * internalRequestTimedCallback(RIL_TimedCallback callback, void *param, const structtimeval *relativeTime){structtimeval myRelativeTime;UserCallbackInfo *p_info;p_info= (UserCallbackInfo *) malloc (sizeof(UserCallbackInfo));p_info->p_callback = callback;p_info->userParam = param;if(relativeTime == NULL) {memset (&myRelativeTime, 0, sizeof(myRelativeTime));} else{memcpy (&myRelativeTime, relativeTime, sizeof(myRelativeTime));}ril_event_set(&(p_info->event), -1, false, userTimerCallback,p_info);//将该任务添加到timer_list中去ril_timer_add(&(p_info->event), &myRelativeTime);triggerEvLoop(); //触发eventLoop线程return p_info;
}
从上面的代码可知,RIL_requestTimedCallback函数就是向eventLoop提交一个超时任务,这个任务的处理函数则为initialCallback,下面直接来看该函数的内容,如下所示。
Reference_ril.c
static void initializeCallback(void *param)
{/*这个函数就是通过发送一些AT指令来初始化BP中的无线通信Modem,不同的modem可能有不同的AT指令。这里仅列出部分代码。*/ATResponse *p_response = NULL;interr;setRadioState (RADIO_STATE_OFF);at_handshake();......err =at_send_command("AT+CREG=2", &p_response);......at_response_free(p_response);at_send_command("AT+CGREG=1", NULL);at_send_command("AT+CCWA=1", NULL);......if(isRadioOn() > 0) {setRadioState (RADIO_STATE_SIM_NOT_READY);
}
......
}
2. RIL_Init的总结
RIL_Init函数由动态库提供,以上面RefRil库的代码为参考,这个函数执行完后,将完成RefRil库的几项重要工作,它们是:
- 创建一个mainLoop工作线程,mainLoop线程的任务是初始化AT模块,并监控AT模块,一旦AT模块被关闭,则会重新初始化AT模块。
- AT模块内部会创建一个工作线程readerLoop,该线程的作用是从串口设备中读取信息,也就是直接和BP打交道。
- mainLoop通过向Rild提交超时任务,完成了对Modem的初始化工作。
在Rild的main函数中还剩下最后一个关键函数RIL_register没有分析了,下面来看看它。
9.3.4 RIL_register的分析
1. 建立对外通信的链路
RIL_register函数将创建两个监听端socket,它们的名字分别是:
- “rild”:这个socket用来和Java层的应用通信。这一点与Vold中的MountService类似。
- “rild-debug”:这个socket用来接收测试程序的测试命令。
下面来看RIL_register函数的代码,如下所示:
Ril.cpp
extern "C" void RIL_register (constRIL_RadioFunctions *callbacks) {//RIL_RadioFunctions结构体由RefRil库输出int ret;int flags;......//版本检测if(s_registerCalled > 0) {return;}//拷贝这个结构体的内容到s_callbacks变量中。memcpy(&s_callbacks, callbacks, sizeof (RIL_RadioFunctions));s_registerCalled = 1;//Rild定义了一些Command,这里做一个小小的检查for(int i = 0; i < (int)NUM_ELEMS(s_commands); i++) {assert(i == s_commands[i].requestNumber);}for(int i = 0; i < (int)NUM_ELEMS(s_unsolResponses); i++) {assert(i + RIL_UNSOL_RESPONSE_BASE== s_unsolResponses[i].requestNumber);}......//start listen socket
#if 0......
#else//SOCKET_NAME_RIL的值为“Ril”,这个socket由init进程根据init.rc的配置创建s_fdListen = android_get_control_socket(SOCKET_NAME_RIL);......//监听ret =listen(s_fdListen, 4);......
#endif
/*
构造一个非超时任务,处理函数是listenCallback。这个任务会保存在监控表中,一旦它的FD
可读就会导致eventLoop的select函数返回。根据前面的介绍可知,listen端的socket
可读表示有客户connect上。由于该任务的persist被设置为false,待listenCallback
处理完后,这个任务就会从监控表中移除。也就是说下一次select的readFDs中将不会有
这个监听socket了,这表明Rild只支持一个客户端的连接。
*/ril_event_set (&s_listen_event, s_fdListen, false,listenCallback, NULL);//触发eventLoop工作rilEventAddWakeup (&s_listen_event);
#if 1
/*
Rild为了支持调试,还增加了一个Ril_debug的socket,这个socket专门用于
测试程序发送测试命令*/s_fdDebug = android_get_control_socket(SOCKET_NAME_RIL_DEBUG);ret =listen(s_fdDebug, 4);......//添加一个非超时任务,该任务对应的处理函数是debugCallback,它是专门用来处理测试命令的。ril_event_set (&s_debug_event, s_fdDebug, true,debugCallback, NULL);rilEventAddWakeup (&s_debug_event);
#endif
}
根据上面的分析,如果有一个客户端connect上Rild,eventLoop就会被触发,并且对应的处理函数listenCallback会被调用,下面就去看看这个函数的实现。
Ril.cpp
static void listenCallback (int fd, short flags,void *param) {int ret;int err;int is_phone_socket;RecordStream *p_rs;struct sockaddr_un peeraddr;socklen_t socklen = sizeof (peeraddr);structucred creds;socklen_t szCreds = sizeof(creds);structpasswd *pwd = NULL;//接收一个客户端的连接,并将返回的socket保存在s_fdCommand中s_fdCommand = accept(s_fdListen, (sockaddr *) &peeraddr,&socklen);......errno= 0;is_phone_socket = 0;//权限控制,判断连接的客户端有没有对应的权限。......//如果没有对应的权限则中止后面的流程//设置这个socket为非阻塞,所以后续的send/recv调用都不会阻塞ret =fcntl(s_fdCommand, F_SETFL, O_NONBLOCK);....../*p_rs为RecordStream类型,它内部会分配一个缓冲区来存储客户端发来的数据,这些都是socket编程常用的做法。*/p_rs =record_stream_new(s_fdCommand, MAX_COMMAND_BYTES);/*构造一个新的非超时任务,这样在收到来自客户端的数据后就会由eventLoop调用对应的处理函数processCommandsCallback了。*/ril_event_set (&s_commands_event, s_fdCommand, 1,processCommandsCallback, p_rs);rilEventAddWakeup (&s_commands_event);onNewCommandConnect();//作一些后续处理,有兴趣的读者可以看看。
}
2. RIL_register小结
RIL_register函数的主要功能是初始化了两个用来和外部进程通信的socket,并且向eventLoop添加了对应的任务。
至此,Rild的main函数就都分析完了。下面对main函数进行总结。
9.3.5 Rild main函数的总结
前面所有的内容都是在main函数中处理的,下面给出main函数执行后的结果,如图9-9所示:
图9-9 Rild main函数执行后的结果示意图
其中:
- Rild和RefRil库的交互通过RIL_Env和RIL_RadioFunctions这两个结构体来完成。
- Rild的eventLoop处理任务。对于来自客户端的任务,eventLoop调用的处理函数是processCommandsCallback。
- RefRil库的readerLoop用来从串口设备中读取数据。
- RefRil库中的mainLoop用来监视readerLoop。
上图画出的模块都是静态的,前面提到的异步请求/处理的工作方式不能体现出来。那么,来分析一个实例,看看这些模块之间是如何配合与联动的。
9.3.6 Rild实例的分析
其实,Rild没什么难度,相信见识过Audio和Surface系统的读者都会有同感。但Java层的Phone应用及相关的Telephony模块却相当复杂,这里不去讨论Phone的实现,而是通过实例来分析一个电话是如何拨打出去的。这个例子和Rild有关的东西比较简单,但在分析代码的路途上,读者可以领略到Java层Phone代码的复杂。
1. 创建Phone
Android支持GSM和CDMA两种Phone,到底创建哪种Phone呢?来看PhoneApp.java是怎么做的:
PhoneApp.java
public void onCreate() {......if(phone == null) {//创建一个Phone,这里使用了设计模式中的Factory(工厂)模式PhoneFactory.makeDefaultPhones(this);phone = PhoneFactory.getDefaultPhone();......
}
工厂模式的好处在于,将Phone(例如代码中的GSMPhone或CDMAPhone)创建的具体复杂过程屏蔽起来了,因为用户只关心工厂的产出物Phone,而不关心创建过程。通过工厂模式可降低使用者和创建者代码之间的耦合性,即使以后增加TDPhone,使用者也不需要修改太多的代码。
下面来看这个Phone工厂:
PhoneFactory.java
public static void makeDefaultPhones(Context context){makeDefaultPhone(context);//调用makeDefaultPhone函数,直接去看看
}public static void makeDefaultPhone(Contextcontext) {synchronized(Phone.class) {......//根据系统设置获取通信网络的模式int networkMode = Settings.Secure.getInt(context.getContentResolver(),Settings.Secure.PREFERRED_NETWORK_MODE,preferredNetworkMode);int cdmaSubscription = Settings.Secure.getInt(context.getContentResolver(),Settings.Secure.PREFERRED_CDMA_SUBSCRIPTION, preferredCdmaSubscription);//RIL这个对象就是rild socket的客户端,AT命令由它发送给RildsCommandsInterface = new RIL(context, networkMode,cdmaSubscription);int phoneType =getPhoneType(networkMode);if(phoneType == Phone.PHONE_TYPE_GSM) {//先创建GSMPhone,然后创建PhoneProxy,这里使用了设计模式中的Proxy模式sProxyPhone = new PhoneProxy(newGSMPhone(context,sCommandsInterface,sPhoneNotifier));} else if (phoneType == Phone.PHONE_TYPE_CDMA) {//创建CDMAPhonesProxyPhone = new PhoneProxy(new CDMAPhone(context,sCommandsInterface,sPhoneNotifier));}sMadeDefaults = true;}}
}
假设创建的是GSMPhone,makeDefaultPhones函数将返回PhoneProxy对象,不过这是一个代理Phone,具体工作还是会由GSMPhone完成。
Phone创建完后,就要拨号了。
2. Dial拨号
Phone应用提供了一个PhoneUtils类,最终的拨号是由它完成的:
PhoneUtils.java
static int placeCall(Phone phone, String number,Uri contactRef) {int status = CALL_STATUS_DIALED;try {//调用Phone的dial函数,这个Phone的真实类型是PhoneProxy,number就是电话号码Connectioncn = phone.dial(number);......
}......
}
前面说过,PhoneProxy代理的对象是GSMPhone,直接去看它的dial函数:
GSMPhone.java
public Connection dial(String dialString) throws CallStateException {return dial(dialString, null);//调用另外一个dial函数}
public Connection dial (String dialString,UUSInfo uusInfo)
throws CallStateException {StringnewDialString = PhoneNumberUtils.stripSeparators(dialString);if (mmi== null) {//mCT是GsmCallTrack类型,调用它的dial函数。return mCT.dial(newDialString, uusInfo);} elseif (mmi.isTemporaryModeCLIR()) {return mCT.dial(mmi.dialingNumber, mmi.getCLIRMode(), uusInfo);}
......
}
又调用GSMCallTrack的dial函数,它的代码如下所示:
GSMCallTrack.java
Connection dial (String dialString, intclirMode, UUSInfo uusInfo)
throws CallStateException {......//构造一个GsmConnection对象pendingMO = newGsmConnection(phone.getContext(), dialString, this, foregroundCall);hangupPendingMO = false;/*cm对象的真实类型就是我们前面提到的RIL类,它实现了CommandInterface。下面将调用它的dial函数。*/cm.dial(pendingMO.address, clirMode, uusInfo,obtainCompleteMessage());......return pendingMO;
}
3. Java层RIL类的分析
Phone应用是不是很复杂?从创建Phone开始,颇费周折才来到了Java层的RIL类,RIL将是Rild中rild socket的唯一客户端。下面来认识一下RIL。
(1)RIL的架构
RIL的构造函数的代码如下所示。
RIL.java
public RIL(Context context, int networkMode, intcdmaSubscription) {super(context);mCdmaSubscription =cdmaSubscription;mNetworkMode = networkMode;//创建一个HandlerThread,从名字上看它是用来发送消息的mSenderThread = new HandlerThread("RILSender");mSenderThread.start();Looper looper = mSenderThread.getLooper();mSender = new RILSender(looper);mReceiver = new RILReceiver();//创建一个RILReceiver线程,从名字上看它是用来接收消息的mReceiverThread = new Thread(mReceiver, "RILReceiver");mReceiverThread.start();......
}
那么和Rild中rild socket通信的socket是在哪创建的呢?答案是在接收线程中,其代码:
RIL.java
class RILReceiver implements Runnable {byte[] buffer;......public voidrun() {int retryCount = 0;try {for (;;) {LocalSocket s = null;LocalSocketAddress l;try {s = new LocalSocket();l = newLocalSocketAddress(SOCKET_NAME_RIL,LocalSocketAddress.Namespace.RESERVED);//和Rild进行连接s.connect(l);......}mSocket = s;int length = 0;try {InputStream is =mSocket.getInputStream();for (;;) {Parcel p;//读数据length = readRilMessage(is,buffer);//解析数据p = Parcel.obtain();p.unmarshall(buffer, 0,length);p.setDataPosition(0);//处理请求,以后再看processResponse(p);p.recycle();}}......}
从上面代码中可知,RIL封装了两个线程:
- mSenderThread,用来向Rild发送消息。
- mReceiverThread,用来从Rild中接收消息。
待RIL创建后,dail函数该干什么呢?
(2)发送dail请求
dial的处理过程,其代码如下所示:
RIL.java
public void dial(String address, int clirMode,UUSInfo uusInfo, Message result) {//创建一个Java层的RIL请求包RILRequest rr =RILRequest.obtain(RIL_REQUEST_DIAL, result);rr.mp.writeString(address);rr.mp.writeInt(clirMode);rr.mp.writeInt(0);if(uusInfo == null) {rr.mp.writeInt(0); // UUS information is absent} else {rr.mp.writeInt(1); // UUS information is presentrr.mp.writeInt(uusInfo.getType());rr.mp.writeInt(uusInfo.getDcs());rr.mp.writeByteArray(uusInfo.getUserData());}//发送数据send(rr);
}private void send(RILRequest rr) {Messagemsg;//发送EVENT_SEND消息,由mSender这个Handler处理msg = mSender.obtainMessage(EVENT_SEND, rr);acquireWakeLock();msg.sendToTarget();//由发送线程处理
}
下面看handleMessage函数:
RIL.java
public void handleMessage(Message msg) {RILRequest rr = (RILRequest)(msg.obj);//请求消息RILRequest req = null;......switch (msg.what) {case EVENT_SEND:boolean alreadySubtracted = false;try{LocalSocket s;s = mSocket; //这个mSocket就是和Rild通信的socket/*执行异步请求/处理时,请求方需要将请求包保存起来,待收到完成通知后再从请求队列中找到对应的那个请求包并做后续处理。请求包一般会保存请求时的上下文信息。以酒店的Morning Call服务为例。假设预约了7、8、9点的服务,那么当7点钟接到电话时,一看表便知道是7点的那个请求完成了,而不是8点或9点的请求完成了。这个7便是请求号的标示,而且完成通知必须回传这个请求号。至于上下文信息,则保存在请求包中。例如酒店会在电话中通知说7点钟要开一个会,这个开会的信息是预约服务的时候由你提供给酒店的。保存请求包是异步请求/处理或异步I/O中常见的做法,不过这种做法有一个很明显的缺点,就是当请求量比较大的时候,会占用很多内存来保存请求包信息。*/synchronized (mRequestsList) {mRequestsList.add(rr);}byte[] data;data = rr.mp.marshall();rr.mp.recycle();rr.mp = null;......s.getOutputStream().write(dataLength);s.getOutputStream().write(data); //发送数据}......
}
至止,应用层已经通过RIL对象将请求数据发送了出去。由于是异步模式,请求数据发送出去后应用层就直接返回了,而且目前还不知道处理结果。那么Rild是如何处理这个请求的呢?
4. Rild处理请求的分析
根据前面对Rild的分析可知,当收到客户端的数据时会由eventLoop调用对应的任务处理函数进行处理,而这个函数就是processCommandsCallback。看它的代码:
(1)Rild接收请求
Rild接收请求的代码如下所示:
Ril.cpp
static void processCommandsCallback(int fd,short flags, void *param) {RecordStream *p_rs; void* p_record;size_t recordlen;int ret;//RecordStream为processCommandsCallback的参数,里面维护了一个接收缓冲区并//有对应的缓冲读写位置控制p_rs = (RecordStream *)param;for(;;) {/*下面这个函数将从socket中read数据到缓冲区,并从缓冲区中解析命令。注意,该缓冲区可能累积了多条命令,也就是说,客户端可能发送了多个命令,而Rild通过一次read就全部接收到了。这个特性是由TCP的流属性决定的。所以这里有一个for循环来接收和解析命令。*/ret = record_stream_get_next(p_rs, &p_record, &recordlen);if(ret == 0 && p_record == NULL) {/* end-of-stream */break;} else if (ret < 0) {break;} else if (ret == 0) {//处理一条命令processCommandBuffer(p_record, recordlen);}}if(ret == 0 || !(errno == EAGAIN || errno == EINTR)) {......//出错处理,例如socket read出错}
}
每解析出一条命令,就调用processCommandBuffer函数进行处理,看这个函数:
Ril.cpp
static int processCommandBuffer(void *buffer,size_t buflen) {Parcel p;status_t status;int32_t request;int32_t token;RequestInfo *pRI;int ret;p.setData((uint8_t *) buffer, buflen);status = p.readInt32(&request);status = p.readInt32 (&token);......//s_commands定义了Rild支持的所有命令及其对应的处理函数if(request < 1 || request >= (int32_t)NUM_ELEMS(s_commands)) {......return 0;}//Rild内部处理也是采用的异步模式,所以它也会保存请求,又分配一次内存。pRI =(RequestInfo *)calloc(1, sizeof(RequestInfo));pRI->token= token;//s_commands是什么?pRI->pCI = &(s_commands[request]);//请求信息保存在一个单向链表中。ret =pthread_mutex_lock(&s_pendingRequestsMutex);pRI->p_next = s_pendingRequests;//p_next指向链表的后继结点s_pendingRequests = pRI;ret =pthread_mutex_unlock(&s_pendingRequestsMutex);//调用对应的处理函数pRI->pCI->dispatchFunction(p, pRI);return 0;
}
上面的代码中,出现了一个s_commands数组,它保存了一些CommandInfo结构,这个结构封装了Rild对AT指令的处理函数。另外Rild还定义了一个s_unsolResponses数组,它封装了unsolicited Response对应的一些处理函数。这两个数组,如下所示:
Ril.cpp
typedef struct {//先看看CommandInfo的定义int requestNumber; //请求号,一个请求对应一个请求号//请求处理函数void(*dispatchFunction) (Parcel &p, struct RequestInfo *pRI);//结果处理函数int(*responseFunction) (Parcel &p, void *response, size_tresponselen);
} CommandInfo;
//下面是s_commands的定义
static CommandInfo s_commands[] = {
#include "ril_commands.h"
};
//下面是s_unsolResponses的定义
static UnsolResponseInfo s_unsolResponses[] = {
#include "ril_unsol_commands.h" //这个头文件读者可以自己去看看
};
再来看ril_commands.h的定义:
ril_commands.h
{0, NULL, NULL}, //除了第一条外,一共定义了103条CommandInfo
{RIL_REQUEST_GET_SIM_STATUS, dispatchVoid,responseSimStatus},......
{RIL_REQUEST_DIAL, dispatchDial, responseVoid},//打电话的处理......
{RIL_REQUEST_SEND_SMS, dispatchStrings,responseSMS}, //发短信的处理......
根据上面的内容可知,在Rild中打电话的处理函数是dispatchDial,它的结果处理函数是responseVoid。
(2)Rild处理请求
Rild处理请求的代码如下所示:
Ril.c
static void dispatchDial (Parcel &p,RequestInfo *pRI) {RIL_Dial dial; //创建一个RIL_Dial对象,它存储打电话时所需要的一些参数。RIL_UUS_Info uusInfo;int32_t sizeOfDial;int32_t t;int32_t uusPresent;status_t status;memset(&dial, 0, sizeof(dial));dial.address = strdupReadString(p);status= p.readInt32(&t);dial.clir = (int)t;...... //中间过程我们略去//调用RIL_RadioFunctions的onRequest函数,也就是向RefRil库发送一个请求。s_callbacks.onRequest(pRI->pCI->requestNumber, &dial,sizeOfDial, pRI);......return;
}
下面去RefRil库,看这个onRequest的处理:
Reference_Ril.c
static void onRequest (int request, void *data,size_t datalen, RIL_Token t)
{ATResponse *p_response;int err;......switch(request) {......case RIL_REQUEST_DIAL: //打电话处理requestDial(data, datalen, t);break;......case RIL_REQUEST_SEND_SMS: //发短信处理requestSendSMS(data, datalen, t);break;default:RIL_onRequestComplete(t, RIL_E_REQUEST_NOT_SUPPORTED, NULL, 0);break;}
}
//我们看看requestDial函数
static void requestDial(void *data, size_tdatalen, RIL_Token t)
{RIL_Dial*p_dial;char* cmd;const char *clir;int ret;p_dial = (RIL_Dial *)data;......//at_send_command将往串口设备发送这条AT指令ret =at_send_command(cmd, NULL);free(cmd);/*对于dail请求,把数据发送给串口就算完成了,所以dial发送完数据后直接调用RIL_onRequestComplete函数来通知请求处理的结果。而有一些请求需要先由AT模块的readLoop线程从串口中读取BP的处理结果后再行通知。*/RIL_onRequestComplete(t, RIL_E_SUCCESS, NULL, 0);
}
看RIL_onRequestComplete函数,这个函数的实现由RIL_Env提供。
Ril.c
extern "C" void
RIL_onRequestComplete(RIL_Token t, RIL_Errno e,void *response,
size_t responselen) {RequestInfo *pRI;int ret;size_t errorOffset;pRI= (RequestInfo *)t;//由于已经收到了请求的处理结果,这表明该请求已经完成,所以需要从请求队列中去掉这个请求。if(!checkAndDequeueRequestInfo(pRI)) {}.....if(pRI->cancelled == 0) {Parcel p;p.writeInt32 (RESPONSE_SOLICITED);p.writeInt32 (pRI->token);errorOffset = p.dataPosition();p.writeInt32 (e);if(response != NULL) {//dial请求的responseFunction函数是responseVoid,读者可以看这个函数ret =pRI->pCI->responseFunction(p, response, responselen);if (ret != 0) {p.setDataPosition(errorOffset);p.writeInt32 (ret);}}......sendResponse(p);//将结果发送给Java的RIL}done:free(pRI);
}
Rild内部也采用了异步请求/处理的结构,这样做有它的道理,因为有一些请求执行的时间较长,例如在信号不好的地方搜索网络信号往往会花费较长的时间。采用异步的方式,能避免工作线程阻塞在具体的请求函数中,从而腾出手来做一些别的工作。
(3)Java RIL处理完成的通知
Rild将dial请求的结果,通过socket发送给Java中的RIL对象。前面说过,RIL中有一个接收线程,它收到数据后会调用processResponse函数进行处理,看这个函数:
RIL.java
private void processResponse (Parcel p) {int type;type = p.readInt();if(type == RESPONSE_UNSOLICITED) {processUnsolicited (p);} else if (type == RESPONSE_SOLICITED) {processSolicited (p); //dial是应答式的,所以走这个分支}releaseWakeLockIfDone();
}private void processSolicited (Parcel p) {int serial, error;boolean found = false;serial = p.readInt();error = p.readInt();RILRequest rr;//根据完成通知中的请求包编号从请求队列中去掉对应的请求,以释放内存rr= findAndRemoveRequestFromList(serial);Objectret = null;if(error == 0 || p.dataAvail() > 0) {try {switch (rr.mRequest) {......//调用responseVoid函数处理结果case RIL_REQUEST_DIAL: ret = responseVoid(p);break;......if (rr.mResult != null) {/*RILReceiver线程将处理结果投递到一个Handler中,这个Handler属于另外一个线程,也就是处理结果最终将交给另外一个线程做后续处理,例如切换界面显示等工作,具体内容就不再详述了。为什么要投递到别的线程进行处理呢?因为RILReceiver负责从Rild中接收数据,而这个工作是比较关键的,所以这个线程除了接收数据外,最好不要再做其他的工作了。*/AsyncResult.forMessage(rr.mResult, ret,null);rr.mResult.sendToTarget();}rr.release();
}
实例分析就到此为止。相信读者已经掌握了Rild的精髓。
9.3.7 Rild总结
从整体来说,Rild并不复杂,其程序框架非常清晰,它和其他系统惟一不同的是,Rild采用了异步请求/处理的工作方式,而异步方式对代码编写能力的要求是几种I/O模式中最高的。读者在阅读Rild这一节内容时,要牢记异步处理模式的流程。
另外,和Rild对应的Java中的Phone程序非常复杂,个人甚至觉得有些过于复杂了。读者如有兴趣,可以看看Phone的代码,写得很漂亮,其中也使用了很多设计模式方面的东西,但我觉得这个Phone应用在设计上,还有很多地方可以改进。这一点,在拓展思考部分再来讨论。
9.4 拓展思考
本章的拓展思考包括,嵌入式系统的存储知识介绍以及Phone应用改进探讨两部分。
9.4.1 嵌入式系统的存储知识介绍
用adb shell登录到我的G7手机上,然后用mount查看信息后,会得到如图9-10所示的结果:
图9-10 mount命令的执行结果
其中,可以发现系统的几个重要的分区,例如/system对应的设备是mtdblock3,那么mtdblock是什么呢?
1. MTD的介绍②
Linux系统提供了MTD(Memory Technology Device,内存技术设备)系统来建立针对Flash设备的统一、抽象的接口,也就是说,有了MTD,就可以不用考虑不同Flash设备带来的差异了,这一点和FBD(FrameBuffer Device)的作用很类似。下面看Linux MTD的系统层次图,如图9-11所示。
图9-11 Linux MTD系统层次图
从上图中可以看出:
- MTD将文件系统与底层的Flash存储器进行了隔离,这样应用层就无须考虑真实的硬件情况了。
- 图9-11中的mtdblock表示MTD块设备。
有了MTD后,就不用关心Flash是NOR还是NAND了。另外,我们从图9-10“mount命令的执行结果”中还可看见mount指定的文件系统中有一个yaffs2,它又是什么呢?
2. Flash文件系统③
先来说说Flash的特性。常见的文件系统(例如FAT32、NTFS、Ext2等)是无法直接用在Flash设备上的,因为无法重复地在Flash的同一块存储位置上做写入操作(必须事先擦除该块后才能写入)。为了能够在Flash设备上使用这些文件系统,必须透过一层转换层(TranslationLayer),将逻辑块地址对应到Flash存储器的物理地址上,以便系统能把Flash当做普通的磁盘处理,可称这一层为FTL(Flash Translation Layer)。Flash转换层的示意图如图9-12所示:
图9-12 FTL和NFTL
从上图中可以看到:
- 如果想使用FAT32或NTFS文件系统,必须通过FTL或NTFL进行转换,其中FTL针对NORFlash,而NTFL针对NAND Flash。
- 尽管有了FTL,但毕竟多了一层处理,这样对I/O效率的影响较大,所以人们开发了专门针对Flash的文件系统,其中YAFFS就是应用比较广泛的一种。
YAFFS是Yet Another Flash File System的简称,目前有YAFFS和YAFFS2两个版本。这两个版本的主要区别是,YAFFS2可支持大容量的NADN Flash,而YAFFS只支持页的大小为512字节的NAND Flash。YAFFS使用OOB(Out Of Bind)来组织文件的结构信息,所以在Vold代码中,可以见到OOB相关的字样。
关于嵌入式存储方面的知识就介绍到这里。有兴趣深入了解的读者可阅读有关驱动开发方面的书籍。
3. Android mtd设备的介绍
这里以我的HTC G7手机为例,分析Android系统中MTD设备的使用情况。
通过adb cat /proc/mtd,得到图9-13所示的MTD设备的使用情况:
图9-13 G7 MTD设备使用情况
这几个设备对应存储空间的大小和作用如下:
- MTD0,主要用于存储开机画面。此开机画面在Android系统启动前运行,由Bootloader调用,大小为1MB。
- MTD1,存储恢复模式的镜像,大小为4.5MB。
- MTD2,存储kernel镜像,大小为3.25MB。
- MTD3,存储sytem镜像,该分区挂载在/system目录下,大小为250MB。
- MTD4,缓冲临时文件,该分区挂载在/cache目录下,大小为40MB。
- MTD5,存储用户安装的软件和一些数据,我的G7把这个设备挂载在/mnt/asec/mtddata目录下,大小为150.75MB。
注意,上面的设备和挂载点与具体的机器及所刷的ROM有关。
9.4.2 Rild和Phone改进探讨
在使用G7的时候,最不满意的就是,群发短信的速度太慢,而且有时会出现ANR的情况,就G7的硬件配置来说,按理不至于发生这种情况。原因究竟何在?通过对Rild和Phone的分析认为,原因和Rild以及Phone的设计有些许关系,下面来探讨一下这个问题。
以Rild和RefRil库为例,来分析Rild和Phone的设计上有哪些特点和问题。注意,这里,将短信程序和Phone程序统称为Phone。
- Rild没有使用Binder通信机制和Phone进行交互,这一点,虽感觉较奇怪,不过也好理解,因为实现一个用Socket进行IPC通信的架构,比用Binder要简单,至少代码量要少一些。
- Rild使用了异步请求/处理的模式,这种模式对于Rild来说是合适的。因为一个请求的处理可能耗时很长,另外一点就是Rild会收到来自BP的unsolicited Response。
- Phone这个应用也使用了异步模式。其实,这也好理解,因为Phone和Rild采用了Socket进行通信,如把Phone中的Socket看做是Rild中的串口设备,就发现这个Phone竟然是Rild在Java层的翻版。这样设计有问题吗?其明显缺陷就是一个请求消息在Java层的Phone中要保存一个,传递到Rild中还要保存一个。另外,Phone和Rild交互的是AT命令。这种直接使用AT命令的方式,对以后的扩展和修改都会造成不少麻烦。
- 再来看群发短信问题。群发短信的实现,就是同一个信息发送到不同的号码。对于目前Phone的实现而言,就是一个for循环中调用一个发送函数,参数中仅有号码不同,而短信内容是一样的。这种方式是否太浪费资源了呢?假设群发目标人数为二百个,那么Java层要保存二百个请求信息,而Rild层也要保存二百个请求信息。并且Rild每处理一个命令就会来一个完成通知。对于群发短信功能来说,本人更关心的是,所有短信发送完后的统一结果,而非单条短信发送的结果。
以上是我关于Rild和Phone设计特点的一些总结。如果由我来实现Phone,该怎么做呢?这里,愿将自己的一些想法与读者分享。
- 在Phone和Rild的进程间通信上,将使用Binder机制。这样,需首先定义一个Phone和Rild通信的接口,这个接口的内容和Rild提供的服务有关,例如定义一个dial函数,定义一个sendSMS函数。除此之外,需要定义Rild向Phone回传Response的通知接口。也就是说,Rild直接利用Binder回调Phone进程中的函数,把结果传过去。采用Binder至少有三个好处。第一,Phone和Rild的交互基于接口函数,就不用在Phone中做AT命令的转换了,另外基于接口的交互使得程序的可扩展性也得到了提高。第二,可以定义自己的函数,例如提供一个函数用来实现群发短信,通过这个函数可将一条短信内容和多个群发目标打包传递给Rild,然后由Rild自己去解析成多条AT命令进行处理。第三,Phone代码将会被精简不少。
- 在内存使用方面,有可能Phone和Rild都需保存请求,这时可充分利用共享内存的优势,将请求信息保存在共享内存中。这样,可减少一部分内存使用。另外,这块内存中存储的信息可能需要使用一定的结构来组织,例如采用优先级队列。这样,那些优先级高的请求就能首先得到处理了。
以上是本人在研究Rild和Phone代码过程中一些不成熟的想法,希望能引起读者共同的思考。读者还可以参考网上名为《RIL设计思想解析》的一篇文章。
9.5 本章小结
本章对Vold和Rild两个重要的daemon程序进行了分析。其中:
- Vold负责Android平台上存储系统的管理和控制。重点关注Vold的两方面的内容,一是它如何接收和处理来自内核的Uevent事件,一是如何处理来自Java层MountService的请求。
- Rild是Android平台上的射频通信控制中枢,接打电话、收发短信等,都需要Rild的参与。对Rild的架构进行了重点分析,尤其对异步请求/响应的知识进行了较详细的介绍。另外,还分析了Phone中拨打电话的处理流程。
本章拓展部分,首先介绍了嵌入式系统中和存储,文件系统相关的知识。另外,还探讨了Phone和Rild设计的特点以及可以改进的某些地方。
① 该书中文版名为《UNIX网络编程第3版.第1卷,套接字联网API》,人民邮电出版社,2009年版
② 参考资料为《Linux设备驱动开发详解》,宋宝华,第530页-531页,人民邮电出版社,2008年。
③ 参考资料为《Linux设备驱动开发详解》,宋宝华,第556页-560页,人民邮电出版社,2008年。