一、简介
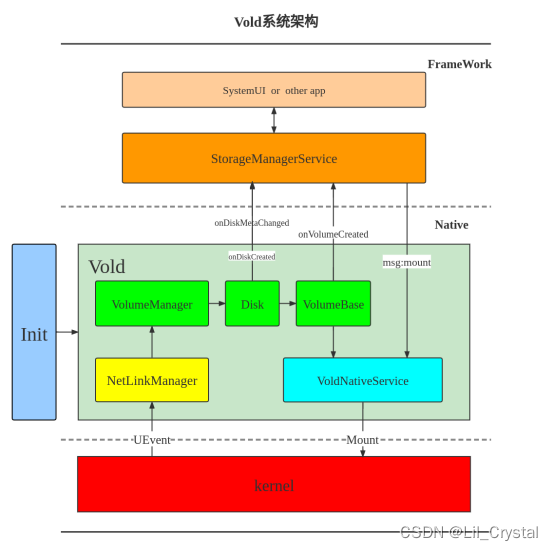
Vold(volume Daemon),即Volume守护进程,用来管理Android中存储类(USB-Storage,包含U盘和SD卡)的热拔插事件,处于Kernel和Framework之间,是两个层级连接的桥梁。Vold在系统中以守护进程存在,是一个单独的进程,在开机阶段由Init拉起。在vold.rc中由详细配置。启动之后监听来自kernel的UEvent,挂载U盘并和FrameWork层的StorageManager通信,设置挂载选项、用户权限等,以实现外部存储对上层app和用户的可见性。(本文主要基于Android 10,末尾会简要介绍目前最新的Android 12与10 的部分变化)
1.项目结构
vold的代码结构
包含Encrypt相关文件是Android在5.0版本增加的全盘加密的实现,
包含Keymaster相关文件是Android在7.0版本增加的文件级加密的实现。
以上两部分归属于vdc加密相关,暂且不表。
system/vold$ tree .
.
├── Android.bp
├── binder
│ └── android
│ └── os
│ ├── IVold.aidl
│ ├── IVoldListener.aidl
│ ├── IVoldMountCallback.aidl
│ └── IVoldTaskListener.aidl
├── fs
│ ├── Exfat.cpp
│ ├── Exfat.h
│ ├── Ext4.cpp
│ ├── Ext4.h
│ ├── F2fs.cpp
│ ├── F2fs.h
│ ├── ufsd_common.h
│ ├── UFSD.cpp
│ ├── UFSD.h
│ ├── ufsd_m.cpp
│ ├── Vfat.cpp
│ └── Vfat.h
├── main.cpp
├── model
│ ├── Disk.cpp
│ ├── Disk.h
│ ├── EmulatedVolume.cpp
│ ├── EmulatedVolume.h
│ ├── ObbVolume.cpp
│ ├── ObbVolume.h
│ ├── PrivateVolume.cpp
│ ├── PrivateVolume.h
│ ├── PublicVolume.cpp
│ ├── PublicVolume.h
│ ├── StubVolume.cpp
│ ├── StubVolume.h
│ ├── VolumeBase.cpp
│ ├── VolumeBase.h
│ ├── VolumeEncryption.cpp
│ └── VolumeEncryption.h
├── NetlinkHandler.cpp
├── NetlinkHandler.h
├── NetlinkManager.cpp
├── NetlinkManager.hs
├── OWNERS
├── Utils.cpp
├── Utils.h
├── VoldNativeService.cpp
├── VoldNativeService.h
├── VoldNativeServiceValidation.cpp
├── VoldNativeServiceValidation.h
├── vold_prepare_subdirs.cpp
├── vold.rc
├── VoldUtil.cpp
├── VoldUtil.h
├── VolumeManager.cpp
└── VolumeManager.h
2.核心模块
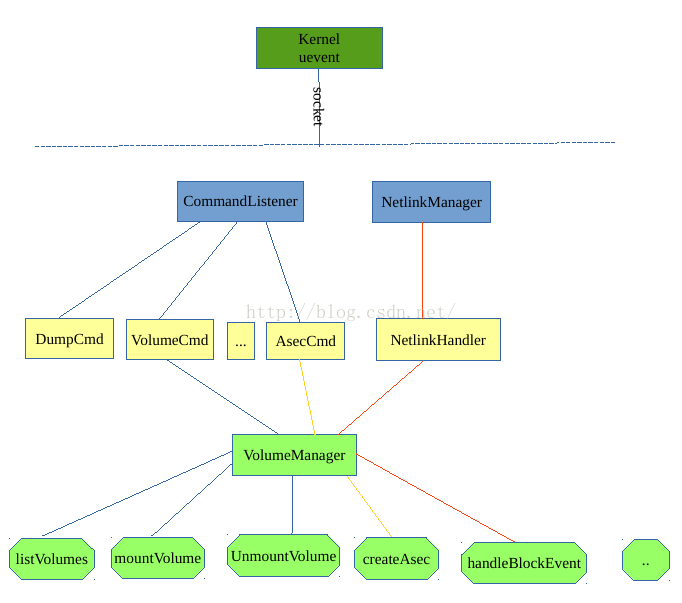
Vold主要包含NetLinkManager(nm)、VolumeManager(vm)、VoldNativeService。
其中NetLinkManager主要负责监听来自kernel的UEvent,用来判断是否是大容量存储类设备(USB,SD),如果是就对其挂载。VolumeManager主要是配置相关的选项并告知上层(Framework,app如:SystemUI显示弹窗,audio读取U盘内容)并接受上层所返回的消息(framework会增加用户ID的权限信息)。VoldNativeService则是真正去实现挂载的服务,会创建相应的文件夹,设定U盘权限,是否开启FUSE等等。
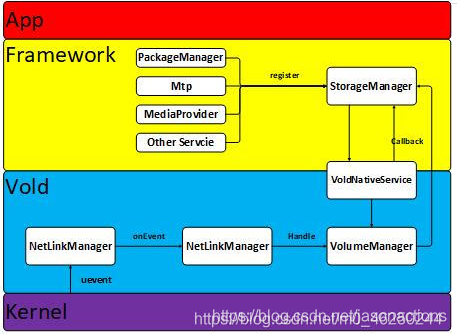
二、系统设计
1. Vold 系统架构
2. Vold的启动
2.1 init进程启动vold
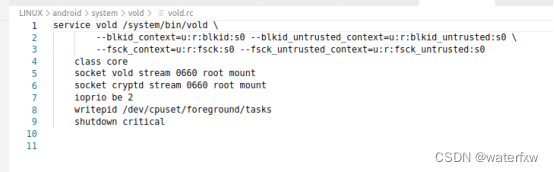
vold服务在开机的时候会启动.定义于system/vold/vold.rc文件中:
service vold /system/bin/vold \--blkid_context=u:r:blkid:s0 --blkid_untrusted_context=u:r:blkid_untrusted:s0 \--fsck_context=u:r:fsck:s0 --fsck_untrusted_context=u:r:fsck_untrusted:s0class coreioprio be 2writepid /dev/cpuset/foreground/tasksshutdown criticalgroup reserved_disk
2.2 Vold main函数的初始化
vlod 被init启动后,会经历以下几个过程来和kernel,framework建立连接:
1).初始化Log函数;
2).解析rc中的参数,创建vold块设备节点;
3).获取NM和VM单例对象;
4).启动NM、VoldNativeService和VM;
5).创建线程池,并进入循环,维持进程不退出;
/system/vold/main.cpp
int main(int argc, char** argv) {
...
android::base::InitLogging(argv, android::base::LogdLogger(android::base::SYSTEM));//初始化log类LOG(INFO) << "Vold 3.0 (the awakening) firing up"; //vold启动logVolumeManager* vm;NetlinkManager* nm;parse_args(argc, argv);//解析参数
...mkdir("/dev/block/vold", 0755);//创建vold节点,用来接收uevent消息;
.../* Create our singleton managers */ //实例化两个对象if (!(vm = VolumeManager::Instance())) {LOG(ERROR) << "Unable to create VolumeManager";exit(1);}if (!(nm = NetlinkManager::Instance())) {LOG(ERROR) << "Unable to create NetlinkManager";exit(1);
}
...//启动VolumeManager
if (vm->start()) { PLOG(ERROR) << "Unable to start VolumeManager";exit(1);}
...
//解析 fstab 文件
if (process_config(vm, &has_adoptable, &has_quota, &has_reserved)) {PLOG(ERROR) << "Error reading configuration... continuing anyways";
}
...//启动VoldNativeServiceif (android::vold::VoldNativeService::start() != android::OK) {LOG(ERROR) << "Unable to start VoldNativeService";exit(1);}
...
//启动NetlinkManagerif (nm->start()) {PLOG(ERROR) << "Unable to start NetlinkManager";exit(1);
}
...android::IPCThreadState::self()->joinThreadPool();//进入循环LOG(INFO) << "vold shutting down";exit(0);
}
2.3 VolumeManager 的初始化
int VolumeManager::start() {...
//卸载掉/mnt/下的所有东西(除/mnt/vendor,/mnt/product,/storage/),使之处于 一个干净的状态
unmountAll();Devmapper::destroyAll();//初始化/dev/device-mapperLoop::destroyAll();//初始化/dev/block/
...CHECK(mInternalEmulated == nullptr);mInternalEmulated = std::shared_ptr<android::vold::VolumeBase>(new android::vold::EmulatedVolume("/data/media"));mInternalEmulated->create();//构造出内置存储目录/data/media
// 构造虚拟磁盘updateVirtualDisk();return 0;
}
mInternalEmulated->create()会将当前存储状态设置成Unmounted。
vm->start()函数之后会调用process_config()来解析fstab文件,把每一条设备挂载信息作为DiskSource都通过addDiskSource添加到volumemanager 的list 数组中。
2.4 VoldNativeService的初始化
status_t VoldNativeService::start() {IPCThreadState::self()->disableBackgroundScheduling(true);status_t ret = BinderService<VoldNativeService>::publish();if (ret != android::OK) {return ret;}sp<ProcessState> ps(ProcessState::self());ps->startThreadPool();ps->giveThreadPoolName();return android::OK;
}
Android 9之前的版本 StorageManagerService与vold的通信是socket,9.0以及后续版本则使用binder通信,VoldNativeService负责连接vold与StorageManagerService。
disableBackgroundScheduling()在接收传入IPC调用时禁用将线程切换到后台。
VoldNativeService继承自BinderService,start函数通过调用publish函数注册了接口。
static status_t publish(bool allowIsolated = false,int dumpFlags = IServiceManager::DUMP_FLAG_PRIORITY_DEFAULT) {sp<IServiceManager> sm(defaultServiceManager());return sm->addService(String16(SERVICE::getServiceName()), new SERVICE(), allowIsolated,dumpFlags);
}
ServiceManager是用来管理Service的,同时协助binder通信,我们可以通过 addService/getService来添加/得到对应的 Service。
static char const* getServiceName() { return "vold"; }
如此,VoldNativeService作为一个接口类,可以被其他进程通过“vold”获取。
2.5 NetLinkManager 的初始化
NetlinkManager::start()主要实现了以下两个功能:
(1)创建并绑定socket用来接收内核消息(uevent);
(2)新建一个NetlinkHandler对象,并调用其start函数开始监听并处理内核传来的uevent消息。
int NetlinkManager::start() {
...if ((mSock = socket(PF_NETLINK, SOCK_DGRAM | SOCK_CLOEXEC, NETLINK_KOBJECT_UEVENT)) < 0) {PLOG(ERROR) << "Unable to create uevent socket";return -1;}
...if ((setsockopt(mSock, SOL_SOCKET, SO_RCVBUFFORCE, &sz, sizeof(sz)) < 0) &&(setsockopt(mSock, SOL_SOCKET, SO_RCVBUF, &sz, sizeof(sz)) < 0)) {PLOG(ERROR) << "Unable to set uevent socket SO_RCVBUF/SO_RCVBUFFORCE option";goto out;}if (setsockopt(mSock, SOL_SOCKET, SO_PASSCRED, &on, sizeof(on)) < 0) {PLOG(ERROR) << "Unable to set uevent socket SO_PASSCRED option";goto out;}if (bind(mSock, (struct sockaddr*)&nladdr, sizeof(nladdr)) < 0) {PLOG(ERROR) << "Unable to bind uevent socket";goto out;}mHandler = new NetlinkHandler(mSock);if (mHandler->start()) {PLOG(ERROR) << "Unable to start NetlinkHandler";goto out;}...
}
由于NetLinkHandler是继承自NetLinkListener,所以调用start就开启了UEvent的监听。
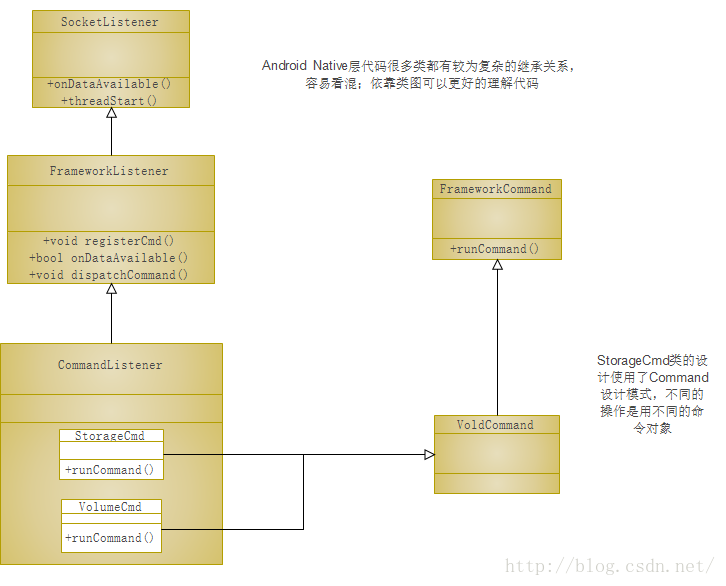
Netlink又是继承SocketListener,代码在: /system/core/libsysutils/src/SocketListener.cpp
3.Vold 的通信
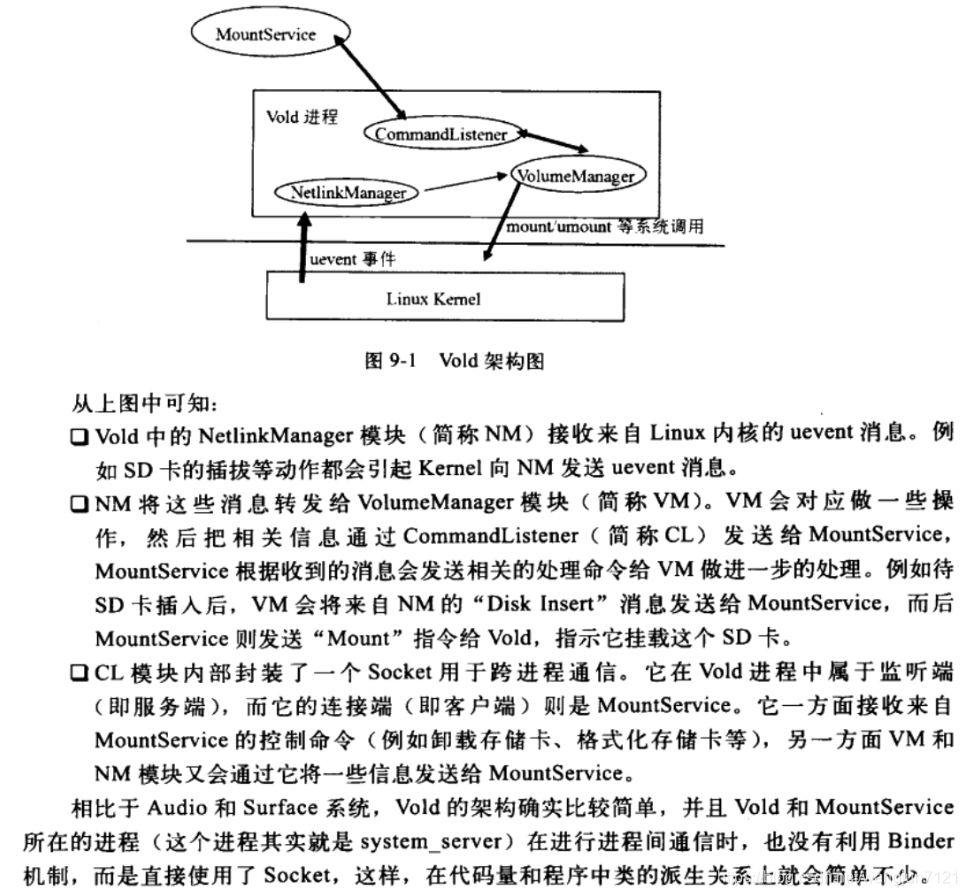
Vold 位于Android 系统的Native层,处于Kernel 与 Framework 之间。向下需要接受来自底层驱动的设备信息并按照来自StorageManager的配置信息,通过系统调用以这些配置将设备挂载以供用户使用。
3.1 Vold 与 Kernel的通信
NetlinkHandler::start()
vold/main.cpp中NetlinkManager::start()函数创建并绑定了socket用来与kernel通信,在此函数最后调用了NetlinkHandler::start()函数来监听消息,接下来分析这个函数。
NetlinkHandler::NetlinkHandler(int listenerSocket) : NetlinkListener(listenerSocket) {}NetlinkHandler::~NetlinkHandler() {}
int NetlinkHandler::start() {return this->startListener();
}
NetlinkHandler的父类是NetlinkListener,而NetlinkListener继承自SocketListener。所以NetlinkHandler::start()函数最终调用了SocketListener::startListener()函数。
int SocketListener::startListener() {return startListener(4);
}
int SocketListener::startListener(int backlog) {if (!mSocketName && mSock == -1) {SLOGE("Failed to start unbound listener");errno = EINVAL;return -1;} else if (mSocketName) {if ((mSock = android_get_control_socket(mSocketName)) < 0) {SLOGE("Obtaining file descriptor socket '%s' failed: %s",mSocketName, strerror(errno));return -1;}SLOGV("got mSock = %d for %s", mSock, mSocketName);fcntl(mSock, F_SETFD, FD_CLOEXEC);}if (mListen && listen(mSock, backlog) < 0) {SLOGE("Unable to listen on socket (%s)", strerror(errno));return -1;} else if (!mListen)mClients[mSock] = new SocketClient(mSock, false, mUseCmdNum);if (pipe2(mCtrlPipe, O_CLOEXEC)) {SLOGE("pipe failed (%s)", strerror(errno));return -1;}if (pthread_create(&mThread, nullptr, SocketListener::threadStart, this)) {SLOGE("pthread_create (%s)", strerror(errno));return -1;}return 0;
}
...
void *SocketListener::threadStart(void *obj) {SocketListener *me = reinterpret_cast<SocketListener *>(obj);me->runListener();pthread_exit(nullptr);return nullptr;
}
startListener的作用是开始监听消息,并开启一个线程去执行runListener()函数。
void SocketListener::runListener() {while (true) {std::vector<pollfd> fds;pthread_mutex_lock(&mClientsLock);fds.reserve(2 + mClients.size());fds.push_back({.fd = mCtrlPipe[0], .events = POLLIN});if (mListen) fds.push_back({.fd = mSock, .events = POLLIN});for (auto pair : mClients) {// NB: calling out to an other object with mClientsLock held (safe)const int fd = pair.second->getSocket();if (fd != pair.first) SLOGE("fd mismatch: %d != %d", fd, pair.first);fds.push_back({.fd = fd, .events = POLLIN});}pthread_mutex_unlock(&mClientsLock);SLOGV("mListen=%d, mSocketName=%s", mListen, mSocketName);int rc = TEMP_FAILURE_RETRY(poll(fds.data(), fds.size(), -1));if (rc < 0) {SLOGE("poll failed (%s) mListen=%d", strerror(errno), mListen);sleep(1);continue;}if (fds[0].revents & (POLLIN | POLLERR)) {char c = CtrlPipe_Shutdown;TEMP_FAILURE_RETRY(read(mCtrlPipe[0], &c, 1));if (c == CtrlPipe_Shutdown) {break;}continue;}if (mListen && (fds[1].revents & (POLLIN | POLLERR))) {int c = TEMP_FAILURE_RETRY(accept4(mSock, nullptr, nullptr, SOCK_CLOEXEC));if (c < 0) {SLOGE("accept failed (%s)", strerror(errno));sleep(1);continue;}pthread_mutex_lock(&mClientsLock);mClients[c] = new SocketClient(c, true, mUseCmdNum);pthread_mutex_unlock(&mClientsLock);}// Add all active clients to the pending list first, so we can release// the lock before invoking the callbacks.std::vector<SocketClient*> pending;pthread_mutex_lock(&mClientsLock);const int size = fds.size();for (int i = mListen ? 2 : 1; i < size; ++i) {const struct pollfd& p = fds[i];if (p.revents & (POLLIN | POLLERR)) {auto it = mClients.find(p.fd);if (it == mClients.end()) {SLOGE("fd vanished: %d", p.fd);continue;}SocketClient* c = it->second;pending.push_back(c);c->incRef();}}pthread_mutex_unlock(&mClientsLock);for (SocketClient* c : pending) {// Process it, if false is returned, remove from the mapSLOGV("processing fd %d", c->getSocket());if (!onDataAvailable(c)) {release(c, false);}c->decRef();}}
}
runListener函数循环读取socket消息,mCtrlPipe[0]作为此处的读端,会从流中读取读取POLLIN对应的事件,每一个client对应的socket文件描述符也都会存储到vector中。接下来就是利用poll函数去轮询vector中的每一个文件描述符。根据revents来决定是否有事件被读到,如果没有事件读到则进行下一轮,有事件被读到就将保存对应文件描述符的client,最后调用 onDataAvailable函数。
bool NetlinkListener::onDataAvailable(SocketClient *cli)
{int socket = cli->getSocket();ssize_t count;uid_t uid = -1;bool require_group = true;if (mFormat == NETLINK_FORMAT_BINARY_UNICAST) {require_group = false;}count = TEMP_FAILURE_RETRY(uevent_kernel_recv(socket,mBuffer, sizeof(mBuffer), require_group, &uid));if (count < 0) {SLOGE("recvmsg failed (%s)", strerror(errno));return false;}NetlinkEvent *evt = new NetlinkEvent();if (evt->decode(mBuffer, count, mFormat)) {onEvent(evt);} else if (mFormat != NETLINK_FORMAT_BINARY) {// Don't complain if parseBinaryNetlinkMessage returns false. That can// just mean that the buffer contained no messages we're interested in.SLOGE("Error decoding NetlinkEvent");}delete evt;return true;
}
onDataAvailable函数是真正用来接收并处理消息的函数,首先调用uevent_kernel_recv函数读取数据,通过decode解析后调用onEvent分发下去,至此,vold守护进程获取到了kernel上传来的uevent消息。
3.2 Vold 与StorageManagerService的通信
(1) init启动zygote进程
init.rc中trigger zygote-start会开启zygote进程与servicemanager进程(binder机制的基础),首先init进程会运行app_main.cpp的main函数:
int main(int argc, char* const argv[]){...bool zygote = false;...if (zygote) {runtime.start("com.android.internal.os.ZygoteInit", args, zygote);} else if (className) {runtime.start("com.android.internal.os.RuntimeInit", args, zygote);} else {fprintf(stderr, "Error: no class name or --zygote supplied.\n");app_usage();LOG_ALWAYS_FATAL("app_process: no class name or --zygote supplied.");}
}
可以看到,当zygote为true时,会执行:
runtime.start(“com.android.internal.os.ZygoteInit”, args, zygote);
runtime是AppRuntime对象,接着我们看看runtime的strat函数:
void AndroidRuntime::start(const char* className, const Vector<String8>& options, bool zygote){...//在startVm()函数中会开启java虚拟机if (startVm(&mJavaVM, &env, zygote) != 0) {return;}onVmCreated(env);//注册JNI函数if (startReg(env) < 0) {ALOGE("Unable to register all android natives\n");return;}
...if (startClass == NULL) {...} else {//通过JNI反射ZygoteInit.java,并获取ZygoteInit的main方法jmethodID startMeth = env->GetStaticMethodID(startClass, "main", "([Ljava/lang/String;)V");if (startMeth == NULL) {//......} else {//调用ZygoteInit的静态main方法env->CallStaticVoidMethod(startClass, startMeth, strArray); //调用ZygoteInit的静态main方法...
}
可以看到,通过forkSystemServer方法来fork SystemServer进程
public static void main(String argv[]) {ZygoteServer zygoteServer = new ZygoteServer();...if (startSystemServer) {Runnable r = forkSystemServer(abiList, socketName, zygoteServer);//......}...}
(2)SystemServer的main方法的执行逻辑
public static void main(String[] args) {new SystemServer().run();
}
这里比较简单,只是new出一个SystemServer对象并执行其run方法.
private void run() {...//判断系统当前时间...//设置系统的语言环境等 ...// Create the system service manager.mSystemServiceManager = new SystemServiceManager(mSystemContext);LocalServices.addService(SystemServiceManager.class, mSystemServiceManager);// Start services.try {startBootstrapServices();startCoreServices();startOtherServices();} catch (Throwable ex) {Slog.e("System", "******************************************");Slog.e("System", "************ Failure starting system services", ex);throw ex;}
...}
run函数新建了SystemServiceManager对象来管理service,并通过startBootstrapServices,startCoreServices,startOtherServices三个函数来分别启动系统Boot级服务,系统核心的服务以及一些非紧要或者是非需要及时启动的服务。
其中,startOtherServices中启动了storagemanagerservice.
private void startOtherServices() {
...if (mFactoryTestMode != FactoryTest.FACTORY_TEST_LOW_LEVEL) {if (!"0".equals(SystemProperties.get("system_init.startmountservice"))) {traceBeginAndSlog("StartStorageManagerService");try {
/*
* NotificationManagerService is dependant on StorageManagerService,
* (for media / usb notifications) so we must start StorageManagerService first.*/ mSystemServiceManager.startService(STORAGE_MANAGER_SERVICE_CLASS);storageManager = IStorageManager.Stub.asInterface(ServiceManager.getService("mount"));} catch (Throwable e) {reportWtf("starting StorageManagerService", e);}traceEnd();traceBeginAndSlog("StartStorageStatsService");try {mSystemServiceManager.startService(STORAGE_STATS_SERVICE_CLASS);} catch (Throwable e) {reportWtf("starting StorageStatsService", e);}traceEnd();}}
...
}
接下来来看startservice函数。
public void startService(@NonNull final SystemService service) {// Register it.mServices.add(service);// Start it.long time = SystemClock.elapsedRealtime();try {service.onStart();} catch (RuntimeException ex) {throw new RuntimeException("Failed to start service " + service.getClass().getName()+ ": onStart threw an exception", ex);}warnIfTooLong(SystemClock.elapsedRealtime() - time, service, "onStart");}
startService函数先向systemservicemanager中添加成员变量,并调用了其onstart函数。接下来看看onstart函数做了什么。
public void onStart() {mStorageManagerService = new StorageManagerService(getContext());publishBinderService("mount", mStorageManagerService);mStorageManagerService.start();}
publishBinderService注册服务,使其可以跨进程访问,service name 为”mount”。
protected final void publishBinderService(String name, IBinder service,boolean allowIsolated, int dumpPriority) {ServiceManager.addService(name, service, allowIsolated, dumpPriority);
}
这里的publishBinderService其实调用的是ServiceManager.addService函数来注册服务,与前面提到的VoldNativeService的注册方式相同。接着看onstart函数中所调用的mStorageManagerService.start()
private void start() {connect();}
继续向下追
private void connect() {...binder = ServiceManager.getService("vold");if (binder != null) {try {
//DeathRecipient检测服务是否中断,如果终端尝试重新连接binder.linkToDeath(new DeathRecipient() {@Overridepublic void binderDied() {Slog.w(TAG, "vold died; reconnecting");mVold = null;connect();}}, 0);} catch (RemoteException e) {binder = null;}}if (binder != null) {mVold = IVold.Stub.asInterface(binder);try {mVold.setListener(mListener);} catch (RemoteException e) {mVold = null;Slog.w(TAG, "vold listener rejected; trying again", e);}} else {Slog.w(TAG, "vold not found; trying again");}
...onDaemonConnected();} if (binder != null) {mVold = IVold.Stub.asInterface(binder);try {mVold.setListener(mListener);} catch (RemoteException e) {mVold = null;Slog.w(TAG, "vold listener rejected; trying again", e);}} else {Slog.w(TAG, "vold not found; trying again");}
...onDaemonConnected();}
connect函数获取了VoldNativeService的handle并与之建立通信通路。private volatile IVold mVold, mvold是根据binder句柄在此处的实例化对象。如此,可以通过mvold来使用VoldNativeService类。
在system/vold/binder/android/os/IVold.aidl文件中声明了mvold可以调用的函数。
interface IVold {void setListener(IVoldListener listener);void monitor();void reset();void shutdown();void onUserAdded(int userId, int userSerial);void onUserRemoved(int userId);void onUserStarted(int userId);
void onUserStopped(int userId);
...
}
建立通信连接后,紧接着调用mVold.setListener(mListener)来监听vold中的事件。
mListener的由来
private final IVoldListener mListener = new IVoldListener.Stub() {@Overridepublic void onDiskCreated(String diskId, int flags) {synchronized (mLock) {
...
}
这里是对所监听到的事件的处理,同时,在system/vold/binder/android/os/IVoldListener.aidl中也声明了所监听的函数
oneway interface IVoldListener {void onDiskCreated(@utf8InCpp String diskId, int flags);void onDiskScanned(@utf8InCpp String diskId);void onDiskMetadataChanged(@utf8InCpp String diskId,long sizeBytes, @utf8InCpp String label, @utf8InCpp String sysPath);void onDiskDestroyed(@utf8InCpp String diskId);void onVolumeCreated(@utf8InCpp String volId,int type, @utf8InCpp String diskId, @utf8InCpp String partGuid);void onVolumeStateChanged(@utf8InCpp String volId, int state);void onVolumeMetadataChanged(@utf8InCpp String volId,@utf8InCpp String fsType, @utf8InCpp String fsUuid, @utf8InCpp String fsLabel);void onVolumePathChanged(@utf8InCpp String volId,@utf8InCpp String path);void onVolumeInternalPathChanged(@utf8InCpp String volId,@utf8InCpp String internalPath);void onVolumeDestroyed(@utf8InCpp String volId);
}
这些事件与刚刚提到的处理是一一对应的。(关于binder通信与AIDL文件的简单介绍在文档最后两部分)
最后,connect()函数调用了onDaemonConnected():
public void onDaemonConnected() {mDaemonConnected = true;mHandler.obtainMessage(H_DAEMON_CONNECTED).sendToTarget();
// mHandler = new StorageManagerServiceHandler(hthread.getLooper());}
发送H_DAEMON_CONNECTED
public void handleMessage(Message msg) {switch (msg.what) {...case H_DAEMON_CONNECTED: {handleDaemonConnected();break;}
...
}
调用handleDaemonConnected()
private void handleDaemonConnected() {initIfBootedAndConnected();resetIfBootedAndConnected();
...}
继续追resetIfBootedAndConnected()
private void resetIfBootedAndConnected() {
...mDisks.clear();mVolumes.clear();addInternalVolumeLocked();}try {mVold.reset();
...
mVold.reset()即VoldNativeService::reset()
binder::Status VoldNativeService::reset() {ENFORCE_UID(AID_SYSTEM);ACQUIRE_LOCK;return translate(VolumeManager::Instance()->reset());
}
对应VolumeManager::reset()
int VolumeManager::reset() {// Tear down all existing disks/volumes and start from a blank slate so// newly connected framework hears all events.if (mInternalEmulated != nullptr) {mInternalEmulated->destroy();mInternalEmulated->create();}for (const auto& disk : mDisks) {disk->destroy();disk->create();}updateVirtualDisk();mAddedUsers.clear();mStartedUsers.clear();return 0;
}
追到这里我们可以看到,当SM启动完后会调用reset函数,因为前面VM启动过程中,mInternalEmulated->create()会调用getListener()获取监听方法,但是彼时SystemServer还没有启动,SM还没有注册下来,所以并没有通知上去。
此处SM启动结束后执行reset,就会重新执行mInternalEmulated->create();过程,这样就会通知到SM。
至此,U盘,sdcard的插拔过程所对应的流程:kernel-> NM -> VM -> SM已经建立,接下来具体分析所经历的函数。
4.Vold 挂载大容量存储设备(Massive Storage)
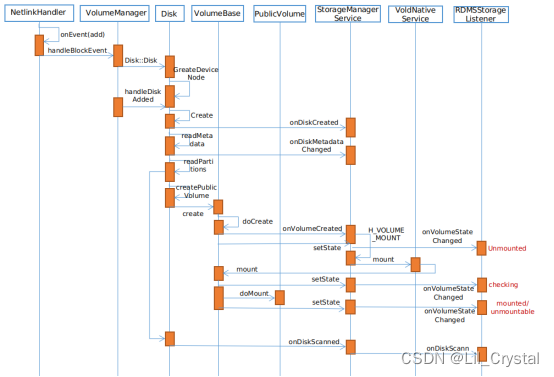
4.1 挂载的时序图
通过时序同可对整体有了解,如需了解细节,可根据相关函数名在下一节搜索。
4.2 从插入U盘开始
在上一章kernel与vold的通信部分,我们知道,netlink会监听kernel上传的关于U盘,sdcard插入的消息,经过decode处理后交由onEvent函数处理。
以下部分log可以看到decode处理后的消息,action=add说明这是一个插入事件。
decodeUEvent [ACTION=add]
decodeUEvent [DEVPATH=/devices/pci0000:00/0000:00:15.0/usb1/1-1/1-1.2/1-1.2:1.0/host3/target3:0:0/3:0:0:0/block/sdd]
decodeUEvent [SUBSYSTEM=block]
decodeUEvent [MAJOR=8]
decodeUEvent [MINOR=48]
decodeUEvent [DEVNAME=sdd]
decodeUEvent [DEVTYPE=disk]
decodeUEvent [SEQNUM=2832]
decodeUEvent [2/1-1.2:1.0/host3/target3:0:0/3:0:0:0/block/sdd/sdd1]
接下来,接续从vold的onEvent函数开始追代码。
void NetlinkHandler::onEvent(NetlinkEvent* evt) {VolumeManager* vm = VolumeManager::Instance();const char* subsys = evt->getSubsystem();if (!subsys) {LOG(WARNING) << "No subsystem found in netlink event";return;}if (std::string(subsys) == "block") {vm->handleBlockEvent(evt);}
}
kernel上传的消息被封装在NetlinkEvent* evt中,onEvent()函数首先对subsys进行判断,subsys指设备类型,如果是“block”,会调用VolumeManager::handleBlockEvent函数。
void VolumeManager::handleBlockEvent(NetlinkEvent* evt) {std::lock_guard<std::mutex> lock(mLock);if (mDebug) {LOG(DEBUG) << "----------------";LOG(DEBUG) << "handleBlockEvent with action " << (int)evt->getAction();evt->dump();}std::string eventPath(evt->findParam("DEVPATH") ? evt->findParam("DEVPATH") : "");std::string devType(evt->findParam("DEVTYPE") ? evt->findParam("DEVTYPE") : "");if (devType != "disk") return;int major = std::stoi(evt->findParam("MAJOR"));//获取主设备号int minor = std::stoi(evt->findParam("MINOR"));//获取次设备号dev_t device = makedev(major, minor);switch (evt->getAction()) {//获取动作类型case NetlinkEvent::Action::kAdd: {//插入操作for (const auto& source : mDiskSources) {if (source->matches(eventPath)) {int flags = source->getFlags();if (major == kMajorBlockMmc || (android::vold::IsRunningInEmulator() &&major >= (int)kMajorBlockExperimentalMin &&major <= (int)kMajorBlockExperimentalMax)) {flags |= android::vold::Disk::Flags::kSd;} else {flags |= android::vold::Disk::Flags::kUsb;}auto disk =new android::vold::Disk(eventPath, device, source->getNickname(), flags);handleDiskAdded(std::shared_ptr<android::vold::Disk>(disk));//处理插入事件break;}}break;}case NetlinkEvent::Action::kChange: {//变更事件
...case NetlinkEvent::Action::kRemove: {//移除事件
...default: {LOG(WARNING) << "Unexpected block event action " << (int)evt->getAction();break;}}
}
如果mDebug为ture,将会打印handleBlockEvent with action + evt->action
紧接着,会获取主次设备号(major,minor)二者联合起来可以识别一个设备,根据evt->action来选择不同的case,插入U盘时,action为add。
接下来会根据major等来判断插入的设备是sdcard还是u盘,并用flags记录。最后,先后调用了Disk()与handleDiskAdded()函数新建一个Disk,用来保存当前磁盘信息。
先看Disk()
Disk::Disk(const std::string& eventPath, dev_t device, const std::string& nickname, int flags): mDevice(device),mSize(-1),mNickname(nickname),mFlags(flags),mCreated(false),mJustPartitioned(false) {mId = StringPrintf("disk:%u,%u", major(device), minor(device));mEventPath = eventPath;mSysPath = StringPrintf("/sys/%s", eventPath.c_str());mDevPath = StringPrintf("/dev/block/vold/%s", mId.c_str());CreateDeviceNode(mDevPath, mDevice);//创建设备节点
}
disk函数初始化了一些参数,并调用了GreateDeviceNode()
status_t CreateDeviceNode(const std::string& path, dev_t dev) {...mode_t mode = 0660 | S_IFBLK;if (mknod(cpath, mode, dev) < 0) {if (errno != EEXIST) {PLOG(ERROR) << "Failed to create device node for " << major(dev) << ":" << minor(dev)<< " at " << path;res = -errno;}}
...return res;
}
而GreateDeviceNode()函数里通过mknod创建设备节点,如果创建失败会打印log
Failed to create device node for +主次设备号
接下来回到handleDiskAdded()函数:
void VolumeManager::handleDiskAdded(const std::shared_ptr<android::vold::Disk>& disk) {// For security reasons, if secure keyguard is showing, wait// until the user unlocks the device to actually touch itif (mSecureKeyguardShowing) {LOG(INFO) << "Found disk at " << disk->getEventPath()<< " but delaying scan due to secure keyguard";mPendingDisks.push_back(disk);} else {disk->create();mDisks.push_back(disk);}
}
mSecureKeyguardShowing参数的值意味着systemserver是否完全启动,mSecureKeyguardShowing为true时,表示systemserver并未完全启动,此时需要延时创建Disk,因为设备开机时,当systemserver没有完全启动时挂载大容量设备的时间较长,而负载过高,有可能会触发watchdong,导致systemserver重启,从而引发系统操作异常。
mSecureKeyguardShowing默认值为true,当systemserver准备好,storage会通过binder机制调用onSecureKeyguardStateChanged()函数来改变mSecureKeyguardShowing的值,进而去调用disk->creat()函数继续创建Disk.
status_t Disk::create() {CHECK(!mCreated);mCreated = true;auto listener = VolumeManager::Instance()->getListener();if (listener) listener->onDiskCreated(getId(), mFlags);readMetadata();readPartitions();return OK;
}
onDiskCreated,通过binder机制,通知StorageManagerService磁盘创建.第三部分提到过,StorageManagerService会监听vold的某些事件,这里的onDiskCreated就是调用的StorageManagerService中的onDiskCreated()函数。
public void onDiskCreated(String diskId, int flags) {synchronized (mLock) {final String value = SystemProperties.get(StorageManager.PROP_ADOPTABLE);switch (value) {case "force_on":flags |= DiskInfo.FLAG_ADOPTABLE;break;case "force_off":flags &= ~DiskInfo.FLAG_ADOPTABLE;break;}mDisks.put(diskId, new DiskInfo(diskId, flags));}}
onDiskCreated()函数最后会调用mDisks.put,将磁盘信息存储在数组中。
接下来回到vold继续看readMetadata()与readPartitions(),这两个函数是为了检查磁盘文件系统格式和读取文件分区列表。
status_t Disk::readMetadata() {mSize = -1;mLabel.clear();
...unsigned int majorId = major(mDevice);switch (majorId) {case kMajorBlockLoop: {mLabel = "Virtual";break;}// clang-format offcase kMajorBlockScsiA: case kMajorBlockScsiB: case kMajorBlockScsiC:case kMajorBlockScsiD: case kMajorBlockScsiE: case kMajorBlockScsiF:case kMajorBlockScsiG: case kMajorBlockScsiH: case kMajorBlockScsiI:case kMajorBlockScsiJ: case kMajorBlockScsiK: case kMajorBlockScsiL:case kMajorBlockScsiM: case kMajorBlockScsiN: case kMajorBlockScsiO:case kMajorBlockScsiP: {// clang-format onstd::string path(mSysPath + "/device/vendor");std::string tmp;if (!ReadFileToString(path, &tmp)) {PLOG(WARNING) << "Failed to read vendor from " << path;return -errno;}tmp = android::base::Trim(tmp);mLabel = tmp;break;}
...
auto listener = VolumeManager::Instance()->getListener();
if (listener) listener->onDiskMetadataChanged(getId(), mSize, mLabel, mSysPath);
}
major表示主设备号,U盘与sdcard为”block”,数值对应8,所以不会走case中的流程,最后调用了StorageManagerService中的onDiskMetadataChanged函数。
public void onDiskMetadataChanged(String diskId, long sizeBytes, String label,String sysPath) {synchronized (mLock) {final DiskInfo disk = mDisks.get(diskId);if (disk != null) {disk.size = sizeBytes;disk.label = label;disk.sysPath = sysPath;}}}
通知StorageManagerService设置disk的参数。
随后,disk::creat()函数调用了readPartitions()
status_t Disk::readPartitions() {int maxMinors = getMaxMinors();if (maxMinors < 0) {return -ENOTSUP;}destroyAllVolumes();// Parse partition tablestd::vector<std::string> cmd;cmd.push_back(kSgdiskPath);cmd.push_back("--android-dump");cmd.push_back(mDevPath);std::vector<std::string> output;status_t res = ForkExecvp(cmd, &output);...dev_t partDevice = makedev(major(mDevice), minor(mDevice) + i);if (table == Table::kMbr) { //分区方式if (++it == split.end()) continue;int type = 0;if (!android::base::ParseInt("0x" + *it, &type)) {LOG(WARNING) << "Invalid partition type " << *it;continue;}switch (type) {case 0x06: // FAT16case 0x07: // HPFS/NTFS/exFATcase 0x0b: // W95 FAT32 (LBA)case 0x0c: // W95 FAT32 (LBA)case 0x0e: // W95 FAT16 (LBA)createPublicVolume(partDevice);break;}} else if (table == Table::kGpt) {...
}if (table == Table::kUnknown || !foundParts) {...}auto listener = VolumeManager::Instance()->getListener();if (listener) listener->onDiskScanned(getId());
...
}
readPartitions()函数扫描了磁盘的分区信息,包括分区方式,分区的文件系统等,随后根据分区方式调用了createPublicVolume()函数,最后调用了StorageManagerService中的onDiskScanned().onDiskScanned()最后再分析。
void Disk::createPublicVolume(dev_t device) {auto vol = std::shared_ptr<VolumeBase>(new PublicVolume(device));if (mJustPartitioned) {LOG(DEBUG) << "Device just partitioned; silently formatting";vol->setSilent(true);vol->create();vol->format("auto");vol->destroy();vol->setSilent(false);}mVolumes.push_back(vol);vol->setDiskId(getId());vol->create();
}
调用PublicBase::create()
status_t VolumeBase::create() {CHECK(!mCreated);mCreated = true;status_t res = doCreate();auto listener = getListener();if (listener) {listener->onVolumeCreated(getId(), static_cast<int32_t>(mType), mDiskId, mPartGuid);}setState(State::kUnmounted);return res;
}status_t PublicVolume::doCreate() {return CreateDeviceNode(mDevPath, mDevice);
}
CreateDeviceNode:volume的创建设备分区节点函数,docreate函数执行完毕后,紧接着调用了StorageManagerService中的onVolumeCreated。
public void onVolumeCreated(String volId, int type, String diskId, String partGuid) {synchronized (mLock) {final DiskInfo disk = mDisks.get(diskId);final VolumeInfo vol = new VolumeInfo(volId, type, disk, partGuid);mVolumes.put(volId, vol);onVolumeCreatedLocked(vol);}}
onVolumeCreatedLocked中发送了mount消息
private void onVolumeCreatedLocked(VolumeInfo vol) {...if (vol.type == VolumeInfo.TYPE_EMULATED) {...} else if (vol.type == VolumeInfo.TYPE_PUBLIC) {// TODO: only look at first public partitionif (Objects.equals(StorageManager.UUID_PRIMARY_PHYSICAL, mPrimaryStorageUuid)&& vol.disk.isDefaultPrimary()) {Slog.v(TAG, "Found primary storage at " + vol);vol.mountFlags |= VolumeInfo.MOUNT_FLAG_PRIMARY;vol.mountFlags |= VolumeInfo.MOUNT_FLAG_VISIBLE;}if (vol.disk.isAdoptable()) {vol.mountFlags |= VolumeInfo.MOUNT_FLAG_VISIBLE;}vol.mountUserId = mCurrentUserId;mHandler.obtainMessage(H_VOLUME_MOUNT, vol).sendToTarget();} else if (vol.type == VolumeInfo.TYPE_PRIVATE) {...} else if (vol.type == VolumeInfo.TYPE_STUB) {...} else {...
}
public void handleMessage(Message msg) {switch (msg.what) {
...case H_VOLUME_MOUNT: {//挂载U盘的消息final VolumeInfo vol = (VolumeInfo) msg.obj;if (isMountDisallowed(vol)) {Slog.i(TAG, "Ignoring mount " + vol.getId() + " due to policy");break;}mount(vol);break;}
...
}
StorageManagerService的handleMessage函数会调用mount()函数来处理H_VOLUME_MOUNT
public void mount(String volId) {enforcePermission(android.Manifest.permission.MOUNT_UNMOUNT_FILESYSTEMS);final VolumeInfo vol = findVolumeByIdOrThrow(volId);if (isMountDisallowed(vol)) {throw new SecurityException("Mounting " + volId + " restricted by policy");}mount(vol);}private void mount(VolumeInfo vol) {try {mVold.mount(vol.id, vol.mountFlags, vol.mountUserId);} catch (Exception e) {Slog.wtf(TAG, e);}}
StorageManagerService中的mount()函数中调用mVold.mount又回到了vold中,即VoldNativeService::mount函数
binder::Status VoldNativeService::mount(const std::string& volId, int32_t mountFlags,...auto vol = VolumeManager::Instance()->findVolume(volId);if (vol == nullptr) {return error("Failed to find volume " + volId);}vol->setMountFlags(mountFlags);vol->setMountUserId(mountUserId);int res = vol->mount();if (res != OK) {return translate(res);}if ((mountFlags & MOUNT_FLAG_PRIMARY) != 0) {res = VolumeManager::Instance()->setPrimary(vol);if (res != OK) {return translate(res);}}return translate(OK);
}
这个地方的vol是调用VolumeManager::findVolume函数从volume列表里获取的,而在create的时候,是将publicvolume的对象取出,所以此处调用的是publicvolume的mount, publicvolume继承的volumebase,且未重新实现mount方法,所以还是使用的volumebase::mount。
status_t VolumeBase::mount() {if ((mState != State::kUnmounted) && (mState != State::kUnmountable)) {LOG(WARNING) << getId() << " mount requires state unmounted or unmountable";return -EBUSY;}setState(State::kChecking);status_t res = doMount();setState(res == OK ? State::kMounted : State::kUnmountable);return res;
}
这个地方会将state设置为checking,然后domount去挂载,如果挂载成功则将状态设置成mounted,失败则设置成unmountable.所以,正常的挂载流程中state变化过程为:
unmounted -> checking -> mounted
接下来先看一下setState()函数的调用
void VolumeBase::setState(State state) {mState = state;auto listener = getListener();if (listener) {listener->onVolumeStateChanged(getId(), static_cast<int32_t>(mState));}
}
setState()中调用了StorageManagerService中的onVolumeStateChanged函数。
public void onVolumeStateChanged(String volId, int state) {synchronized (mLock) {final VolumeInfo vol = mVolumes.get(volId);if (vol != null) {final int oldState = vol.state;final int newState = state;vol.state = newState;onVolumeStateChangedLocked(vol, oldState, newState);}}}
...
private void onVolumeStateChangedLocked(VolumeInfo vol, int oldState, int newState) {
...
mCallbacks.notifyVolumeStateChanged(vol, oldState, newState);
...
}
...private void notifyVolumeStateChanged(VolumeInfo vol, int oldState, int newState) {final SomeArgs args = SomeArgs.obtain();args.arg1 = vol.clone();args.argi2 = oldState;args.argi3 = newState;obtainMessage(MSG_VOLUME_STATE_CHANGED, args).sendToTarget();}
...case MSG_VOLUME_STATE_CHANGED: {callback.onVolumeStateChanged((VolumeInfo) args.arg1, args.argi2, args.argi3);break;}
...
setState的后续函数调用流程是先通知StorageManagerService当前的挂载状态,并发送状态变化的消息,并通过回调函数通知RDMSStorageListener更新状态。
回到domount函数
status_t PublicVolume::doMount() {readMetadata();
//读取U盘文件系统,后根据文件系统类型去检查设备路径。if (mFsType == "vfat" && vfat::IsSupported()) {VolumeManager::Instance()->getLock().unlock();if (vfat::Check(mDevPath)) {LOG(ERROR) << getId() << " failed filesystem check";VolumeManager::Instance()->getLock().lock();return -EIO;}VolumeManager::Instance()->getLock().lock();if (!getCreated())return -EIO;...// Use UUID as stable name, if availablestd::string stableName = getId();if (!mFsUuid.empty()) {stableName = mFsUuid;}mRawPath = StringPrintf("/mnt/media_rw/%s", stableName.c_str());mFuseDefault = StringPrintf("/mnt/runtime/default/%s", stableName.c_str());//默认,一般只有读
mFuseRead = StringPrintf("/mnt/runtime/read/%s", stableName.c_str());//读权限
mFuseWrite = StringPrintf("/mnt/runtime/write/%s", stableName.c_str());//写
mFuseFull = StringPrintf("/mnt/runtime/full/%s", stableName.c_str());//读写setInternalPath(mRawPath);if (getMountFlags() & MountFlags::kVisible) {setPath(StringPrintf("/storage/%s", stableName.c_str()));} else {setPath(mRawPath);}//创建挂载目录if (fs_prepare_dir(mRawPath.c_str(), 0700, AID_ROOT, AID_ROOT)) {PLOG(ERROR) << getId() << " failed to create mount points";return -errno;}if (mFsType == "vfat") {if (vfat::Mount(mDevPath, mRawPath, false, false, false, AID_MEDIA_RW, AID_MEDIA_RW, 0007,true)) {//系统调用挂载U盘PLOG(ERROR) << getId() << " failed to mount " << mDevPath;return -EIO;}}
...
//创建对应的目录if (fs_prepare_dir(mFuseDefault.c_str(), 0700, AID_ROOT, AID_ROOT) ||fs_prepare_dir(mFuseRead.c_str(), 0700, AID_ROOT, AID_ROOT) ||fs_prepare_dir(mFuseWrite.c_str(), 0700, AID_ROOT, AID_ROOT) ||fs_prepare_dir(mFuseFull.c_str(), 0700, AID_ROOT, AID_ROOT)) {PLOG(ERROR) << getId() << " failed to create FUSE mount points";return -errno;}dev_t before = GetDevice(mFuseFull);if (!(mFusePid = fork())) {if (getMountFlags() & MountFlags::kPrimary) {// clang-format offif (execl(kFusePath, kFusePath,"-u", "1023", // AID_MEDIA_RW"-g", "1023", // AID_MEDIA_RW"-U", std::to_string(getMountUserId()).c_str(),"-w",mRawPath.c_str(),stableName.c_str(),NULL)) {// clang-format onPLOG(ERROR) << "Failed to exec";}
...
domount()函数中的vfat::Mount函数实现了真正的挂载,具体的mount流程处于kernel部分,不同的文件系统有不同的特性,mount流程也会不一样,通过系统调用由VFS来分配是由哪个文件系统来处理。
/system/core/sdcard/sdcard.cpp main->run_sdcardfs,挂载这四个fuse路径,用户空间app根据权限访问这四个挂载点。
而后,setState会根据domount的返回值来更新状态。
最后,回到readPartitions()函数中的onDiskScanned,onDiskScanned是在StorageManagerService中定义。
public void onDiskScanned(String diskId) {synchronized (mLock) {final DiskInfo disk = mDisks.get(diskId);if (disk != null) {onDiskScannedLocked(disk);}}}
...
private void onDiskScannedLocked(DiskInfo disk) {...disk.volumeCount = volumeCount;mCallbacks.notifyDiskScanned(disk, volumeCount);}
...private void notifyDiskScanned(DiskInfo disk, int volumeCount) {final SomeArgs args = SomeArgs.obtain();args.arg1 = disk.clone();args.argi2 = volumeCount;obtainMessage(MSG_DISK_SCANNED, args).sendToTarget();}
...case MSG_DISK_SCANNED: {callback.onDiskScanned((DiskInfo) args.arg1, args.argi2);break;}
...
onDiskScanned函数的后续调用流程与setstate相同,都是通过StorageManagerService中的回调函数来通知RDMSStorageListener磁盘信息。
5.Vold 卸载大容量存储设备
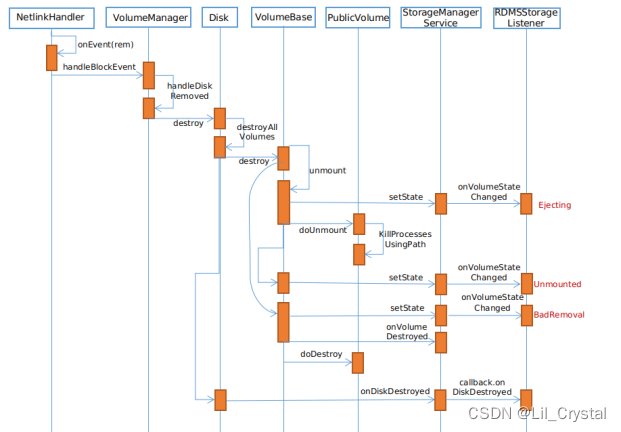
卸载部分基本同挂载类似,不再赘述。贴出时序图
5.1 U盘卸载的时序图
三、相关知识及Debug
1.UEvent
关于UEvent的详细介绍推荐一篇文章:UEvent 机制
1.1 UEvent 结构
/system/core/init/uevent.h
struct Uevent {std::string action;std::string path;std::string subsystem;std::string firmware;std::string partition_name;std::string device_name;std::string modalias;int partition_num;int major;int minor;};
1.2 查看UEvent
logcat | grep decodeUEvent
或
logcat | grep COREU
下图为Android 系统中的UEvent日志
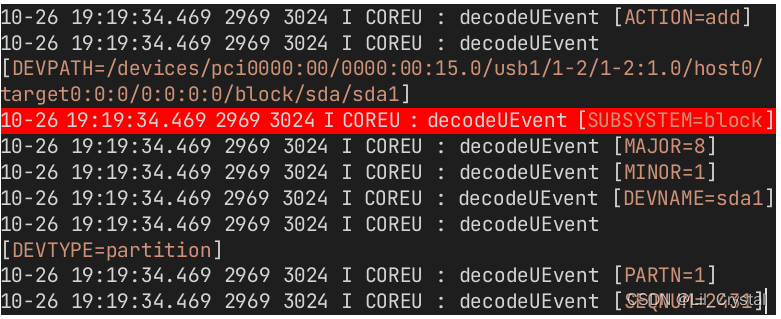
用来查看kernel是否发送,如果没有发送那么问题就停留在kernel中。事实上 /mnt/media_rw/下出现U盘不一定代表U盘就是被vold正常挂载了,有可能是上次卸载异常,还是要根据UEvent确认,确实进入Vold再进一步分析。
2. Vold 正常挂载的日志
由于Vold在Android 中输出的日志主要为D(debug)级别,请确保日志系统可以输出D级以上的日志。
使用logcat查看vold 日志
logcat | grep vold
3.最新的 Android 12 中Vold的部分变化
Android 11 中移除了sdcardfs这个文件系统的支持,详细请参见Google官方文档:弃用SDCardfs
官方只是推荐使用FUSE去代替sdcardfs,但是并不意味这在Android 11 之后的版本不能使用sdcardfs,如果您使用的kernel版本低于5.0还是可以继续使用sdcardfs 的。vold在Android12 中依然保留着对于sdcardfs的支持。
最主要体现就是原有U盘是使用SDcardfs来管理外部存储设备的运行时权限
U盘被挂载在“/mnt/media_rw/UUID”下,
“/mnt/media_rw/UUID”该路径又被分别挂载在/mnt/runtime/default/UUID、/mnt/runtime/read/UUID、/mnt/runtime/write/UUID、/mnt/runtime/full/UUID下用于管理上层app对于外部存储设备的runtime权限。
可以通过命令 cat /proc/mounts 查看到挂载情况
console:/ # cat /proc/mounts
...
/dev/block/vold/public:8,1 /mnt/media_rw/B467-CE00 vfat rw,dirsync,nosuid,nodev,noexec,noatime,uid=1023,gid=1023,fmask=0007,dmask=0007,allow_utime=0020,codepage=437,iocharset=iso8859-1,shortname=mixed,utf8,errors=remount-ro 0 0
/mnt/media_rw/B467-CE00 /mnt/runtime/default/B467-CE00 sdcardfs rw,nosuid,nodev,noexec,noatime,fsuid=1023,fsgid=1023,gid=1015,mask=6,userid=11 0 0
/mnt/media_rw/B467-CE00 /storage/B467-CE00 sdcardfs rw,nosuid,nodev,noexec,noatime,fsuid=1023,fsgid=1023,gid=1015,mask=6,userid=11 0 0
/mnt/media_rw/B467-CE00 /mnt/runtime/read/B467-CE00 sdcardfs rw,nosuid,nodev,noexec,noatime,fsuid=1023,fsgid=1023,gid=9997,mask=18,userid=11 0 0
/mnt/media_rw/B467-CE00 /mnt/runtime/write/B467-CE00 sdcardfs rw,nosuid,nodev,noexec,noatime,fsuid=1023,fsgid=1023,gid=9997,mask=18,userid=11 0 0
/mnt/media_rw/B467-CE00 /mnt/runtime/full/B467-CE00 sdcardfs rw,nosuid,nodev,noexec,noatime,fsuid=1023,fsgid=1023,gid=9997,mask=7,userid=11 0 0
可以注意到到runtime相关挂载是sdcardfs文件系统。
而在最新的12 上,挂载路径变化如下。
console:/ # cat /proc/mounts /dev/block/vold/public:8,1 /mnt/media_rw/B467-CE00 vfat rw,dirsync,nosuid,nodev,noexec,noatime,gid=1023,fmask=0007,dmask=0007,allow_utime=0020,codepage=437,iocharset=iso8859-1,shortname=mixed,utf8,error0
/dev/fuse /mnt/user/10/B467-CE00 fuse rw,lazytime,nosuid,nodev,noexec,noatime,user_id=0,group_id=0,allow_other 0 0
/dev/fuse /mnt/installer/10/B467-CE00 fuse rw,lazytime,nosuid,nodev,noexec,noatime,user_id=0,group_id=0,allow_other 0 0
/dev/fuse /mnt/androidwritable/10/B467-CE00 fuse rw,lazytime,nosuid,nodev,noexec,noatime,user_id=0,group_id=0,allow_other 0 0
/dev/block/vold/public:8,1 /mnt/pass_through/10/B467-CE00 vfat rw,dirsync,nosuid,nodev,noexec,noatime,gid=1023,fmask=0007,dmask=0007,allow_utime=0020,codepage=437,iocharset=iso8859-1,shortname=mixed,utf0