一、自动控制原理 1
文章目录
- 一、自动控制原理 [^1]
- 1. 控制原理
- 1.1 开环与闭环系统
- 1.2 稳定性分析[^2]
- 1.3 一起燃烧卡路里/科学减肥(系统分析实例_数学建模部分)
- 1.4 终值定理与稳态误差[^3]
- 1)比例控制
- 2)比例积分控制
- 1.5 根轨迹
- 1.6 PID控制
- 2. 数学工具
- 2.2 拉普拉斯逆变换[^4]
- 2.3 矩阵的性质[^5]
- 2.4 bode图
- 1. 如何去理解bode[图](https://www.bilibili.com/video/BV1gx411X7k6)?
- 2. 从一个实例出发理解bode图
- 3. bode图的作用是什么?
- 2.5 单位冲激函数
- 二、 现代控制原理串讲
- 1. 现代控制理论概要
- 2. 怎样去分析一个状态空间方程系统呢?
- 三、最后的一些思考
- 轨迹跟踪与制导之间的关系
1. 控制原理
1.1 开环与闭环系统
下面是开环系统与闭环系统的示例。以给水壶加热的过程举例,开环系统只是简单的利用开关信号控制水壶的加热。而下图的闭环控制系统中,将添加温度传感器所测量的信号作为系统的反馈量。设计控制系统的核心就是通过对闭环系统的控制器进行调整,利用反馈量信号,完成闭环的稳定控制。
同时,这就是反馈的过程。
简单的开环系统有如下描述:(这里以流体力学的公式作为举例)
添加控制器D(s),并增加测量H(s),构成如下闭环系统。但是在分析闭环系统的稳定性时,一般的做法是将其转换成为开环系统,并将新构造的开环系统传递函数作为研究对象,分析系统的稳定性。
1.2 稳定性分析2
对于一个系统,如果没有稳定性的先决条件,那么其他的(稳态误差分析、瞬态误差分析)将无从说起。稳定性:传递函数极点在复平面的左半边。(横坐标为极点,纵坐标为零点)
所以对于系统稳定性的讨论,实际上是在分析输入为单位冲激函数时,系统输出的传递函数。最后观察系统输出随时间变化的曲线是否到达稳定的位置。
零点和极点的定义如下:
分析为什么极点为负的,系统是稳定的:
下面这个图要更加直观:
那么我们如何设计控制器?就是将最终的传递函数的极点在左边平面,叫做极点配置。现代控制理论中,研究的是状态矩阵的特征值,对应的就是传递函数的极点。
1.3 一起燃烧卡路里/科学减肥(系统分析实例_数学建模部分)
框图表示如下:
设计比例控制器(最为简单的控制器)如下:
u = k p e u=k_{p} e u=kpe
那么如何设计该控制器,让最终的系统趋向于稳定状态呢?(也就是说传递函数的极点在左半边平面)
学习控制理论一定要从微分方程入手,弄清楚微分方程与传递函数之间的关系就会容易理解很多。
通过对于比例控制器的分析之后发现,单纯的比例控制最终产生稳态误差。
1.4 终值定理与稳态误差3
下面讨论的系统是存在参考信号的系统,类似于下图。终值定理,用来算系统输出的极限的工具。(FVT)
下图解释了弹簧阻尼系统的传递函数,还有在冲激响应下系统的终值定理的使用方式。
这里需要注意的是第二种情况,代表了输入参考信号为c时(相当于r)的情况。
条件如下:
最终求出来的极限值经过运算就是系统的稳态误差。
1)比例控制
举例说明。下面是一个最为简单的一阶系统,采用的控制方式是比例控制。
利用定理分析稳态误差如下:
这里说明了比例控制的局限性,必须采用更加实用性的控制算法。比例控制充法消除稳态误差
2)比例积分控制
并有下面变换方式:
通过引入一个积分信号,让本来的一阶系统变成一个二阶系统。
1.5 根轨迹
再回到弹簧系统,是一个二阶系统。
对于高阶系统不过也是几个一阶系统的叠加,如下:
这一节评估了根的位置对于控制器的影响。
1.6 PID控制
- 比例控制
- 微分控制:调节水温变化的速度,
- 积分控制:误差的累计量
注意:
- 比例积分控制没有单独的比例控制收敛快
- 微分控制解决了超调量问题
- 微分控制的问题是初始状态下的输入值很大
- 同时,微分控制的控制量受到测量误差的影响非常大。他对噪声非常敏感
示例:
在无人机中,利用串联PID控制完成姿态和高度控制是比较经典的方法,参考博客。
如果想增加飞行器的稳定性(增加阻尼)并提高它的控制品质,我们可以进一步的控制它的角速度,于是角度/角速度-串级PID控制算法应运而生。在这里,相信大多数朋友已经初步了解了角度单环PID的原理,但是依旧无法理解串级PID究竟有什么不同。其实很简单:它就是两个PID控制算法,只不过把他们串起来了(更精确的说是套起来)。那这么做有什么用?答案是,它增强了系统的抗干扰性(也就是增强稳定性),因为有两个控制器控制飞行器,它会比单个控制器控制更多的变量,使得飞行器的适应能力更强。为了更为清晰的讲解串级PID,这里笔者依旧画出串级PID的原理框图。
2. 数学工具
2.2 拉普拉斯逆变换4
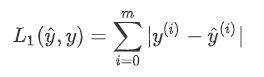
2.3 矩阵的性质[^5]
矩阵有下面的性质,现代控制理论的分析中常常会用到。
2.4 bode图
给信号滤波的过程中,需要注意幅频响应。如果在带通范围内不是1的话,就会改变信号的幅值,就会改变最终加速度输出的信号。另外,上面的图就是bode图,但是是基于离散系统的。
1. 如何去理解bode图?
bode图是针对于传递函数而言的,用在连续系统上。(因为控制系统常常用传递函数来表示。)
%% 这个是正解
b = [1,2,3];
a = [2,1,3];
figure;bode(b,a)
%
[h1 , ftp] = freqs(b,a);
mag = 20*log10(abs(h1)); % get magnitude of spectrum in dB
phase = angle(h1)/pi*180; % get phase in deg.
figure
semilogx(ftp,mag)
xlabel('Frequency (Hz)'),ylabel('Magnitude (dB)')
(这样描述是和真实系统不一致的,具体参考滤波器性质)
总结来说有以下几点:
- 振幅的比较用10log10就行,但是能量的比较需要20log10
- 振幅与功率/能量之间的关系如下:
2. 从一个实例出发理解bode图
对于系统传递函数:
G ( s ) = a s + a G(s)=\frac{a}{s+a} G(s)=s+aa
分析频率响应:
∣ G ( j ω ) ∣ = 1 1 + ( ω a ) 2 |G(j \omega)|=\sqrt{\frac{1}{1+\left(\frac{\omega}{a}\right)^{2}}} ∣G(jω)∣=1+(aω)21
∠ G ( j ω ) = − arctan ( w a ) \angle G(j \omega)=-\arctan \left(\frac{w}{a}\right) ∠G(jω)=−arctan(aw)
- 低频:w<<a
∣ G ( j ω ) ∣ = 1 20 log ∣ G ( j ω ) ∣ = 0 ∠ G ( j ω ) = 0 \begin{array}{l} | G(j \omega)| = 1\\ 20 \log|G(j \omega)|=0 \\ \angle G(j \omega)=0 \end{array} ∣G(jω)∣=120log∣G(jω)∣=0∠G(jω)=0
- 截止频率:w=a
这个-3dB很重要,表达的是输出的振幅是输入的振幅的sqrt(1/2),能量是一半的关系。
∠ G ( g w ) = − arctan 1 = − 4 5 ∘ \angle G(g w)=-\arctan 1=-45^{\circ} ∠G(gw)=−arctan1=−45∘
- 高频:w>>a
bode图如下:
3. bode图的作用是什么?
实际上,我们可以将级联系统的子系统bode图进行累加,那么我们就得到了新的级联系统的真正的bode图了。原理如上。
2.5 单位冲激函数
二、 现代控制原理串讲
1. 现代控制理论概要
首先要了解一个简单的弹簧阻尼模型,作为控制的对象,其满足胡克定律。
x ˙ = k x x ¨ = B x \begin{array}{l} \dot{x}=k x \\ \ddot{x}=B x \end{array} x˙=kxx¨=Bx
描述现代控制理论中的系统,最基础的当然是状态空间表示法:
当然,通过拉普拉斯变换可以转换成下面的形式,控制对象是弹簧阻尼块。
其中有一条重要的信息,实际上矩阵A的特征值就是G(s)的极点,决定了系统的稳定性。上面的右式时通用的。
去分析一个系统,主要需要考虑以下几个重要的性质。
(那么对于自动控制,只需要极点就够了)
-
可控性
-
李雅普诺夫稳定性:确定系统的稳定状态,控制系统可以满足数学的条件。在一阶系统中,常常用极点分析的方法去观察稳定性。现代控制理论中常用到的分析系统的方法就是去找系统的V函数,得到最后是不是能够
-
可观性:状态观测器。系统状态加入不可直接测量,那么就需要通过输出和控制量去估计状态。状态观测器需要达到一个收敛的状态。建立观测器时,实际上是建立一个反馈系统,使得误差等于0。(这里是不是有误差状态量的部分?)
对于可观测性,需要问一个问题:是不是所有系统都是可测的?借鉴可控性的推导,有下面的结论:
2. 怎样去分析一个状态空间方程系统呢?
实际上看到设计控制器就是去配置特征值的过程。这里的特征值有点像自动控制原理中的极点的概念,决定了系统随时间是收敛的,还是振动的,还是逼近于无穷的。
下面是对于一个控制系统的分析过程,利用配置特征值的方法可以确定比例控制的控制系数u与状态量x之间的关系。
三、最后的一些思考
轨迹跟踪与制导之间的关系
轨迹跟踪的目标是使状态和参考状态的误差保持在0附近。举例,对深空飞行器而言,按照轨迹优化+轨迹跟踪这两个步骤实现控制。参考轨迹是人为设计的,可以是全局最优的,也可以是次优的。然后把跟踪误差保持在0附近,这也有一套控制律,比如LQR轨迹跟踪器。
状态控制按照给定的控制律,在航天器轨迹控制中叫做制导;在姿态控制中好像没见过先设计好姿态运动规律的,都是即时控制。制导律必须全局渐进稳定,适用于高动态的环境,比如空空导弹采用比例导引法。
https://www.bilibili.com/video/av62276712 ↩︎
https://www.bilibili.com/video/BV1s4411X7qd/?spm_id_from=333.788.videocard.0 ↩︎
https://www.bilibili.com/video/BV14J411A7M2 ↩︎
https://www.bilibili.com/video/BV1NE411d78U ↩︎