博客转载自:http://www.cnblogs.com/ironstark/p/5051533.html
关键点检测本质上来说,并不是一个独立的部分,它往往和特征描述联系在一起,再将特征描述和识别、寻物联系在一起。关键点检测可以说是通往高层次视觉的重要基础。但本章节仅在低层次视觉上讨论点云处理问题,故所有讨论都在关键点检测上点到为止。NARF 算法实际上可以分成两个部分,第一个部分是关键点提取,第二个部分是关键点信息描述,本文仅涉及第一个部分。
在文章开始之前,有非常重要的一点要说明,点云中任意一点,都有一定概率作为关键点。关键点也是来自原始点云中的一个元素。和图像的边缘提取或者关键点检测算法追求n次插值,最终求的亚像素坐标不同,点云的关键点只在乎找到那个点。
1. 边缘提取
首先声明本文所有思想算法公式均来自:Point Feature Extraction on 3D Range Scans Taking into Account Object Boundaries
在正式开始关键点提取之前,有必要先进行边缘提取。原因是相对于其他点,边缘上的点更有可能是关键点。和图像的边缘不同(灰度明显变化),点云的边缘有更明确的物理意义。对点云而言,场景的边缘代表前景物体和背景物体的分界线。所以,点云的边缘又分为三种:前景边缘,背景边缘,阴影边缘。
rangeImage 是一个天然适合用于边缘提取的框架。在这里需要做一些假设:每个rangeImage像素中假设都只有一个点(显然在生成rangeImage的时候点云是被压缩了的,压缩了多少和rangeImage的分辨率有关,分辨率不能太小,否则rangeImage上会有"洞”,分辨率太大则丢失很多信息)。
三维点云的边缘有个很重要的特征,就是点a 和点b 如果在 rangImage 上是相邻的,然而在三维距离上却很远,那么多半这里就有边缘。由于三维点云的规模和稀疏性,“很远”这个概念很难描述清楚。到底多远算远?这里引入一个横向的比较是合适的。这种比较方法可以自适应点云的稀疏性。所谓的横向比较就是和 某点周围的点相比较。 这个周围有多大?不管多大,反正就是在某点pi的rangeImage 上取一个方窗。假设像素边长为s. 那么一共就取了s^2个点。接下来分三种情况来讨论所谓的边缘:
1.这个点在某个平面上,边长为 s 的方窗没有涉及到边缘
2.这个点恰好在某条边缘上,边长 s 的方窗一半在边缘左边,一半在右边
3.这个点恰好处于某个角点上,边长 s 的方窗可能只有 1/4 与 pi 处于同一个平面
如果将 pi 与不同点距离进行排序,得到一系列的距离,d0 表示与 pi 距离最近的点,显然是 pi 自己。 ds^2 是与pi 最远的点,这就有可能是跨越边缘的点了。 选择一个dm,作为与m同平面,但距离最远的点。也就是说,如果d0~ds^2是一个连续递增的数列,那么dm可以取平均值。如果这个数列存在某个阶跃跳动(可能会形成类似阶跃信号)那么则发生阶跃的地方应该是有边缘存在,不妨取阶跃点为dm(距离较小的按个阶跃点)原文并未如此表述此段落,原文取s=5, m=9 作为m点的一个合理估计。
对任意一个点,进行打分,来判断该点作为边缘点有多大可能性。首先,边缘可能会在某点的:上,下,左,右四个方向。
所以只要把pi 和 pi 右边的点求相对距离。 并把这个相对距离和dm进行比较,就可以判断边缘是不是在该点右边。如果距离远大于dm,显然该点右边的邻点就和pi不是同一个平面了。
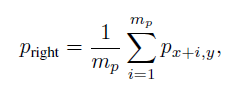
为了增加对噪声的适应能力,取右边的点为右边几个点的平均数。接下来依据此信息对该点进行打分。
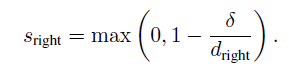
其中deta 就是dm. dright = || pi pright ||.
最后再取大于0.8的Sright,并进行非极大值抑制。就可以得到物体的边缘了
2. 关键点提取
在提取关键点时,边缘应该作为一个重要的参考依据。但一定不是唯一的依据。对于某个物体来说关键点应该是表达了某些特征的点,而不仅仅是边缘点。所以在设计关键点提取算法时,需要考虑到以下一些因素:
i) it must take information about borders and the surface structure into account;
边缘和曲面结构都要考虑进去
ii) it must select positions that can be reliably detected even if the object is observed from another perspective;
关键点要能重复
iii) the points must be on positions that provide stable areas for normal estimation or the descriptor calculation in general.
关键点最好落在比较稳定的区域,方便提取法线
对于点云构成的曲面而言,某处的曲率无疑是一个非常重要的结构描述因素。某点的曲率越大,则该点处曲面变化越剧烈。在2D rangeImage 上,去 pi 点及其周边与之距离小于2deta的点,进行PCA主成分分析。可以得到一个 主方向v,以及曲率值 lamda. 注意, v 必然是一个三维向量。那么对于边缘点,可以取其 权重 w 为1 , v 为边缘方向。对于其他点,取权重 w 为 1-(1-lamda)^3 , 方向为 v 在平面 p上的投影。 平面 p 垂直于 pi 与原点连线。到此位置,每个点都有了两个量,一个权重,一个方向。将权重与方向带入下列式子 I 就是某点 为特征点的可能性。
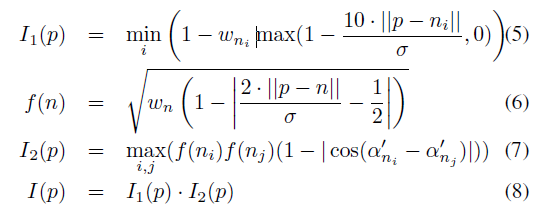
最后进行极大值抑制,就可以得到一些特征点了。
3. 关于特征点提取的一些思考
在我看来,本文提出的算法效果上可能确实不错,但是这算法里面太多经验值与神秘数。各种式子没有明确的物理意义,只是单纯为了获得一个较好的结果设计出来 "打分"的。 这种算法实在谈不上优雅,当然,我连这种不优雅的算法也设计不出来。。。。。。。
点云的特征点提取应该与后面的特征描述是松耦合的。确实不得不承认,针对不同的点云:稀疏的,致密的,有序的,无序的,有遮挡的,高精测量的.......设计不同的关键点提取算法也无可厚非。总结出的关键点提取算法原则就是要尺度不变,鲁棒性好,至于是否一定要存在于平坦区域,我觉得并不一定。不同的关键点提取算法可以和不同的特征描述算法进行组合,最终得到一个较好的效果。如果非要把关键点提取算法和特征描述算法紧耦合,那势必会失去一部分灵活性。
最后还有一点想要吐槽的是,点云中的点为什么不应该自带是否是关键点的性质,而需要我们来进行检测?这显然不符合面向对象的设计原则........我觉的应该有某种点云采集方法,得到的点云可以有以下性质:point.is_key_point = 1/0.
这多好~ -_-笑死