1:设置终端求解类型

2:创建物体模型
设置单位

设置一个变量表示传输线终端到圆心的距离

添加新的介质材料


创建正多边体



创建完成以后 可以通过“ctrl+D”全屏显示

创建环形带状线

创建矩形面


通过复制生成其他3根传输线


创建圆面
合并圆面和4个传输线
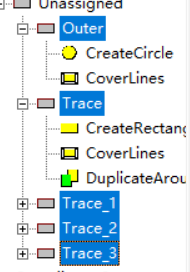


在生成一个圆面用于构造圆环

依次选中trace和圆面,利用boolean-> substract构造圆环


设置边界条件
对于当前的设计条件来说,物体上下表面是参考地,所以它的上下表面需要被设置为理想导体边界条件,在HFSS中,背景会被默认设置为理想导体边界条件,所以介质层的上下表面会被默认设置为理想导体边界条件,而不需要重新设置为理想导体边界条件;
另外这个环状结构需要被设置为理想导体边界条件。因此,选中环形结构,设置理想导体边界


设置成功后,会在工程树中看到

设置4个端口激励(设置为波端口激励)

首先选中该平面

使用“ctrl+B”选中波端口1所在的平面,

然后鼠标右击

设置端口名称为P1


同理,依次设置P2,P3,P4
添加求解设置


添加扫频设置


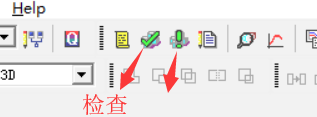
检查设计的完整性和正确性并运行
查看1~7GHz的扫频结果


S参数扫频结果:端口2和端口4在工作频点为4GHz时S参数为-3dB,表示端口2和端口4的输出功率大约是端口1的1/2(可以通过S参数的公式计算出来);S11=-44dB@4GHz,即其回波损耗为-44dB;S14=-51

通过添加make点 查看具体数值

查看在4GHz频点下的S参数矩阵值