大学物理(下)知识点总结(持续更新)
文章目录
- 大学物理(下)知识点总结(持续更新)
- 静电场
- 知识点总结
- 习题精选
- 磁场
- 知识点总结
- 习题精选
- 期中复习总结
- 电磁场
- 知识点总结
- 习题精选
- 狭义相对论力学基础
- 知识点总结
- 习题精选
静电场
需要掌握的重难点:电通量的高斯定理,电势的两种求法。
知识点总结
1、电荷守恒定律
在一个封闭系统内,不论进行怎么样的变化过程,系统内正负电荷量的代数和保持不变。
【知识迁移:基尔霍夫第一定律KCL】
2、库仑定律
F = 1 4 π ε 0 q 1 ⋅ q 2 r 2 F=\frac{1}{4\pi\varepsilon_0}\frac{q_1\cdot q_2}{r^2} F=4πε01r2q1⋅q2
在真空中两个静止的点电荷之间的静电作用力大小与这两个点电荷所带电量的乘积成正比,与他们之间的距离的平方成反比,作用力的方向沿着两个点电荷的连线。
3、电场强度
E = F q 0 = 1 4 π ε 0 q r 2 E=\frac{F}{q_0}=\frac{1}{4\pi\varepsilon_0}\frac{q}{r^2} E=q0F=4πε01r2q
电场中某点电场强度E的大小等于单位电荷在该点受力的大小,其方向为正电荷在该点受力的方向。
点电荷系在某点P产生的电场的电场强度等于各点电荷单独在该点产生的电场强度的矢量和。
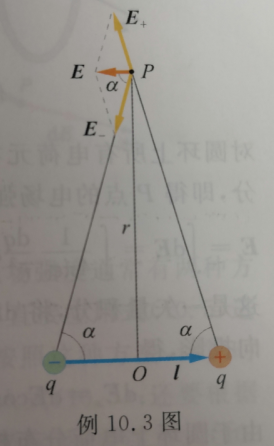
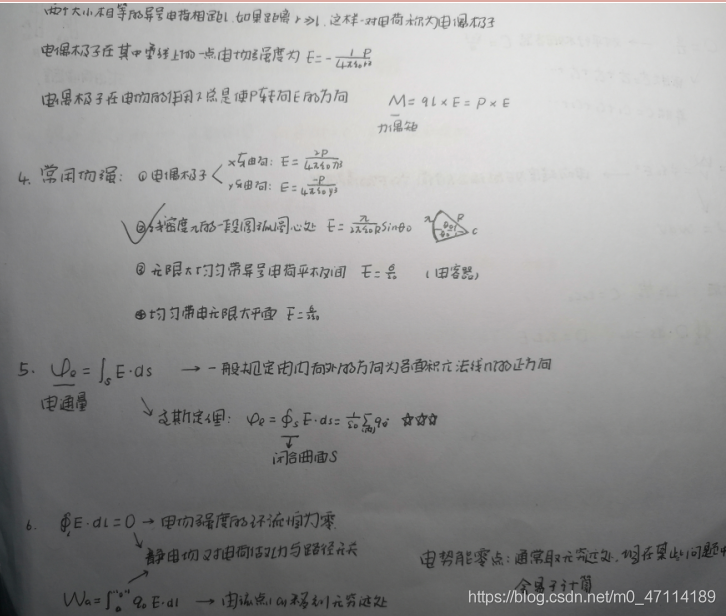
4、电偶极子
相对两个大小相等的异号点电荷+q和-q,相距为l,如果要计算电场强度的各场点相对这一对电荷的距离r比l大很多(r>>l),这样一堆点电荷称为电偶极子。 p = q l p=ql p=ql
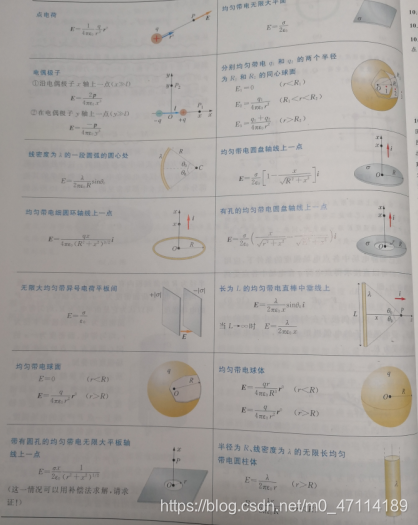
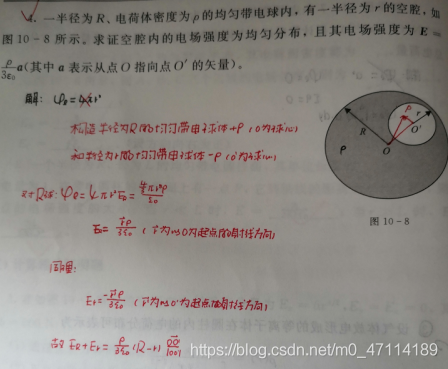
常见集合体的电场强度(重点记忆均匀无限大平面和均匀带电球体(面))
5、电通量(电场线净条数)
电场线上任意点的切线方向表示该点电场强度E的方向。
在电场中任意一点处,垂直于电场强度方向上,想象取一极小的面积元ds,穿过该小面积的电场线条数dN满足 E = d N d S E=\frac{dN}{dS} E=dSdN的关系,E为该点电场强度的大小。
电通量: d ϕ e = E n d S = E c o s θ d S d\phi_e=E_ndS=Ecos\theta dS dϕe=EndS=EcosθdS则, ϕ e = ∫ S E ⋅ d S \phi_e = \int_SE\cdot dS ϕe=∫SE⋅dS
6、高斯定理
真空中任何静电场,穿过任一闭合曲面的电通量,在数值上等于该闭合曲线内包围的电量的代数和乘以 1 ε 0 \frac{1}{\varepsilon_0} ε01,即 ϕ e = 1 ε 0 q \phi_e = \frac{1}{\varepsilon_0}q ϕe=ε01q
7、静电场的环路定理
试验电荷在任意给定的静电场中移动时,静电力对试验电荷所做的功,只取决于试验电荷的电量和所经路径的起点及终点的位置,而与移动的具体路径无关。
在静电场中,电场强度沿任意闭合曲线的积分都为零。
8、电势能
电荷在电场中某点的电势能,在量值上等于把电荷从该点移动到电势能零参考点时,静电力所做的功。
9、电势
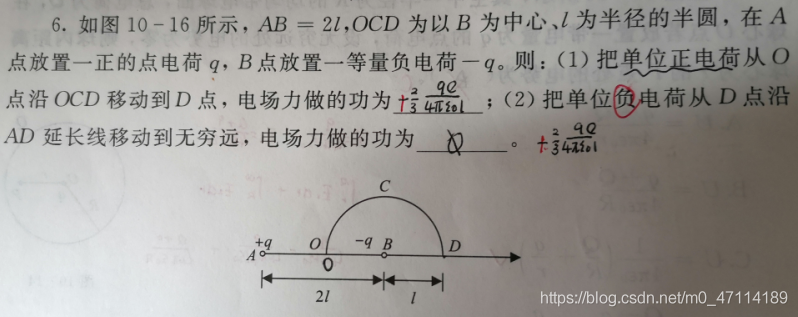
电场中某点的电势,其量值等于把单位正电荷从该点沿任意路径移动到电势能为零的参考点时,静电力所做的功。
u a = ∫ a " 0 " E ⋅ d l u_a = \int^{"0"}_a E\cdot dl ua=∫a"0"E⋅dl
电场中a和b点间的电势差,其量值上等于把单位正电荷从a点移动到b点时,静电力所做的功。电势差与电势的零参考点无关。
u a b = ∫ a b E ⋅ d l u_{ab}=\int^b_aE\cdot dl uab=∫abE⋅dl
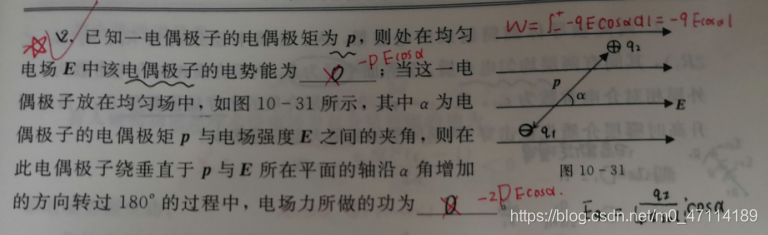
特别的:电偶极子所具有的电势能 W = − p ⋅ E W=-p\cdot E W=−p⋅E
在点电荷系产生的电场中,某点的电势是各点电荷单独存在时,在该点产生的电势的代数和。
电势的两种求法
1)从电荷分布求电势(代数和)
u = ∫ S 1 4 π ε 0 q r u = \int_S\frac{1}{4\pi\varepsilon_0}\frac{q}{r} u=∫S4πε01rq
2)从电场强度分布求电势
u = ∫ a ∞ E ⋅ d l u = \int^\infty_a E\cdot dl u=∫a∞E⋅dl
常见带电体产生的电势

10、等势面
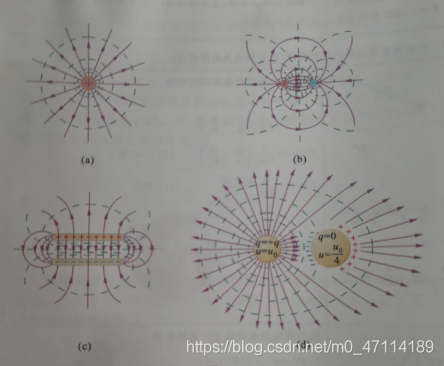
在静电场中,电场线与等势面处处正交。
电场强度在dl方向的投影等于电势沿该方向的变化率的负值。
电势沿等势面法线方向的变化率最大。
E = − d u d l E = -\frac{du}{dl} E=−dldu
11、静电平衡
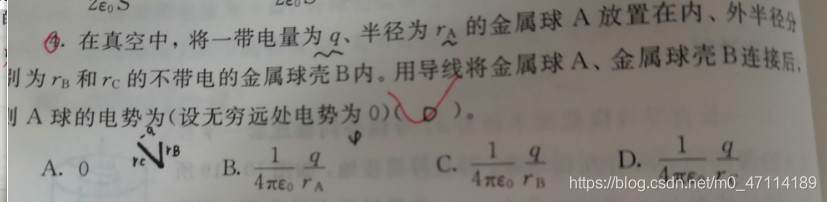
当导体内部的电场强度处处为零、导体上的电势处处相等时,导体达到静电平衡状态。
尖端放电现象:E>空气击穿场强
当导体接地时:
1)孤立导体失去全部电荷
2)非孤立导体不确定
3)导体腔
12、电容
C = Q U C=\frac{Q}{U} C=UQ
电容器的串联: 1 C = 1 C 1 + 1 C 2 + ⋯ \frac{1}{C}=\frac{1}{C_1}+\frac{1}{C_2}+\cdots C1=C11+C21+⋯
电容器的并联: C = C 1 + C 2 + ⋯ C=C_1+C_2+\cdots C=C1+C2+⋯
13、静电能
电场能量密度: ω = 1 2 ε 0 E 2 = 1 2 D ⋅ E \omega=\frac{1}{2}\varepsilon_0E^2=\frac{1}{2}D\cdot E ω=21ε0E2=21D⋅E
电场能量: W = 1 2 ε 0 E 2 V = ∫ 1 2 ε 0 E 2 d V = 1 2 Q U ( 电 容 器 ) W=\frac{1}{2}\varepsilon_0E^2V=\int\frac{1}{2}\varepsilon_0E^2dV=\frac{1}{2}QU(电容器) W=21ε0E2V=∫21ε0E2dV=21QU(电容器)
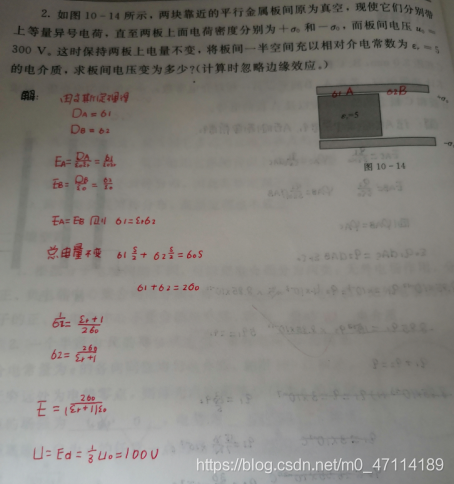
14、电介质
U = U 0 ε r U = \frac{U_0}{\varepsilon_r} U=εrU0
E = E 0 ε r E = \frac{E_0}{\varepsilon_r} E=εrE0
C = C 0 ε r C = C_0\varepsilon_r C=C0εr
在电介质内部,合电场强度E总是小于自由电荷产生的电场强度 E 0 E_0 E0。
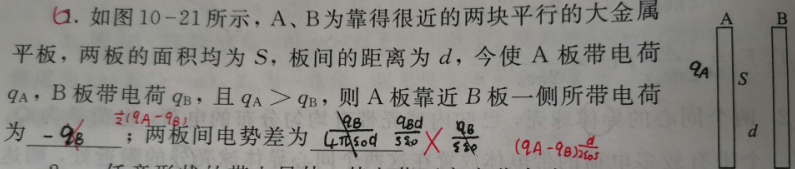
电介质表面束缚电荷的面密度是极板上自由电荷面密度的( 1 − 1 ε r 1-\frac{1}{\varepsilon_r} 1−εr1)倍。需要指出,其条件为:各向同性均匀介质不一定要充满电场所在空间,但只要电介质的表面是等势面即可。
电介质中的高斯定理: ∬ S D ⋅ d S = q 0 \iint_SD\cdot dS=q_0 ∬SD⋅dS=q0(与真空中的高斯定理做对比) D = ε 0 ε r E D=\varepsilon_0 \varepsilon_r E D=ε0εrE
通过任意闭合曲面S的电位移通量,等于该闭合曲面所包围的自由电荷的代数和,与束缚电荷以及闭合曲面之外的自由电荷无关。
习题精选





磁场
需要掌握的重难点:安培环路定理,洛伦兹力和安培力
知识点总结
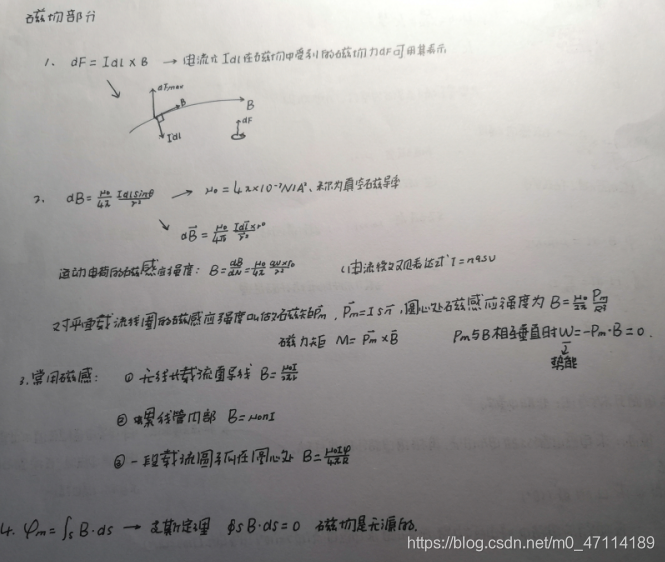
1、磁感应强度 B B B
B = d F m a x I d l B = \frac{dF_{max}}{Idl} B=IdldFmax
在磁场中总可以找到一个方向,当电流元 I d l Idl Idl在该点的方向与这个方向一致时,电流元所受的磁场力为0,这个特殊方向就是磁感应强度的方向。 F m a x F_{max} Fmax为 I d l Idl Idl与该点磁感应强度垂直时的受力,此时相比于其他方向,该方向的受力最大。
在恒定磁场的确定点,B具有确定的值,它由磁场本身决定,而与 I d l Idl Idl的大小无关。
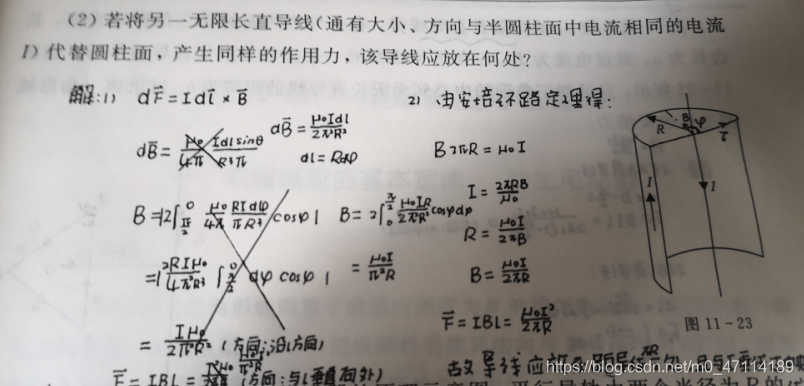
d F → = I d l → × B d\overrightarrow F=Id\overrightarrow l\times B dF=Idl×B(B的方向也由该式决定,同时满足右手螺旋法则)

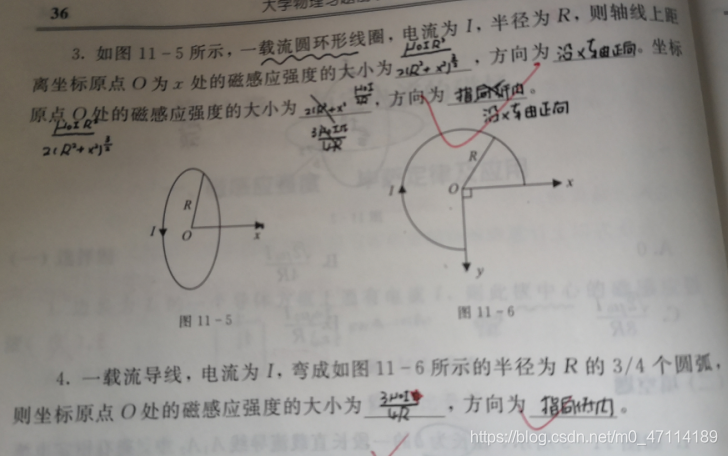
2、毕奥-萨伐尔定律
电流元 I d l Idl Idl在空间某点P处产生的磁感应强度 d B dB dB的大小与电流元 I d l Idl Idl的大小成正比,与电流元 I d l Idl Idl指向P点的矢量r和电流元 I d l Idl Idl之间的夹角 θ \theta θ的正弦 s i n θ sin\theta sinθ成反比,而与P点到电流元距离r的平方成反比。
d B dB dB垂直于 I d l Idl Idl与r组成的平面,指向可以用右手螺旋法则确定。
故 d B → = μ 0 I d l → × r → 0 4 π r 2 d\overrightarrow B = \frac{\mu_0Id\overrightarrow l\times \overrightarrow r^0}{4\pi r^2} dB=4πr2μ0Idl×r0
对于运动电荷产生的磁场,转换为电流产生的磁场,即 I = n q S v = q 2 π w I=nqSv=\frac{q}{\frac{2\pi}{w}} I=nqSv=w2πq
常见磁感应强度公式: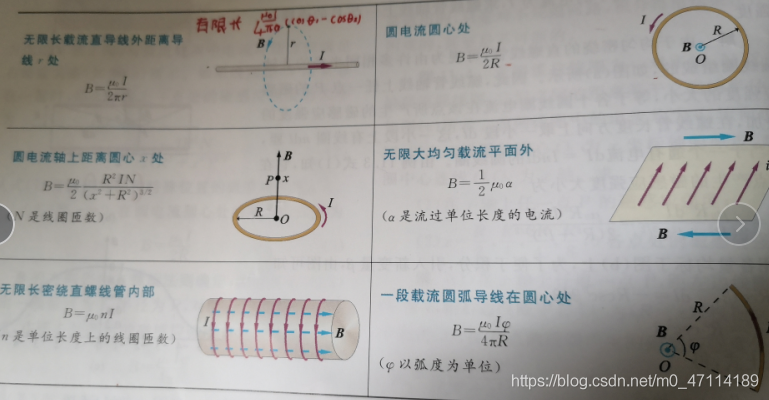
3、磁场的高斯定理(磁通量)
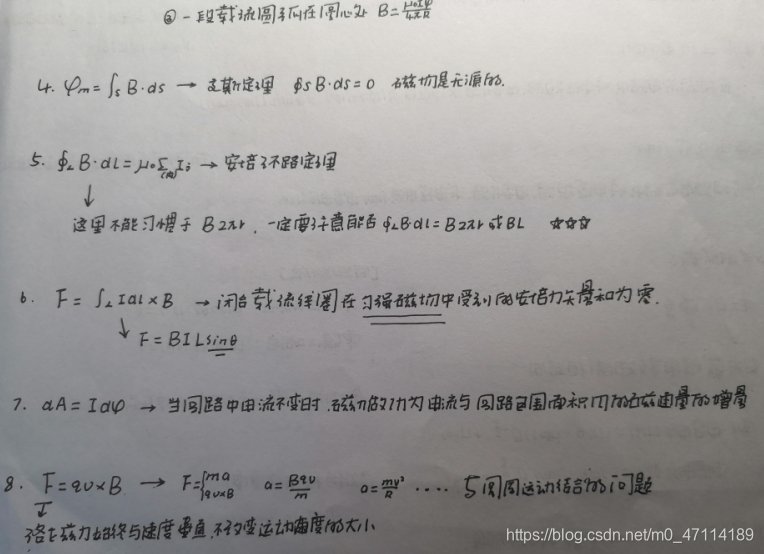
磁通量为在磁场中穿过任意面积元 d S dS dS的磁通量定义为 d ϕ m = B ⋅ d S = B c o s θ d S d\phi_m=B\cdot dS=Bcos\theta dS dϕm=B⋅dS=BcosθdS,常使用积分形式: ϕ m = ∫ s B ⋅ d S \phi_m = \int_sB\cdot dS ϕm=∫sB⋅dS
如果S是个闭合曲面则,总磁通量恒等于0.这就是磁场的高斯定理。
4、安培环路定理
磁感应强度沿任意闭合路径L的线积分,等于这闭合路径L包围的所有电流代数和的 μ 0 \mu_0 μ0倍。即, ∫ L B ⋅ d l = μ 0 Σ I i \int_LB\cdot dl = \mu_0 \Sigma I_i ∫LB⋅dl=μ0ΣIi
安培环路定理与电场中的高斯定理同样重要,在求磁感应强度方面的应用,极大方便了计算。
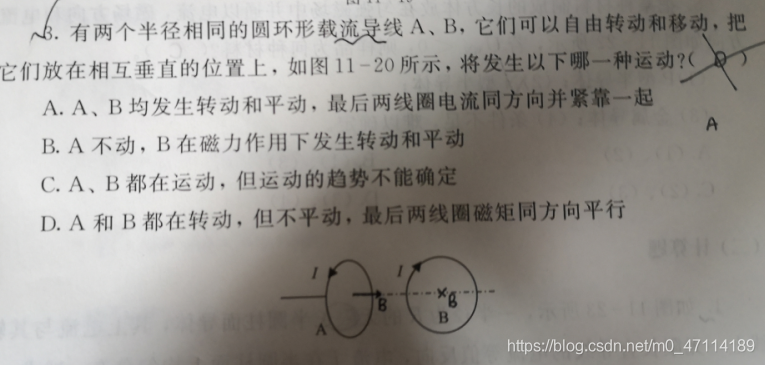
5、磁场的力的作用
①磁场对电流的作用
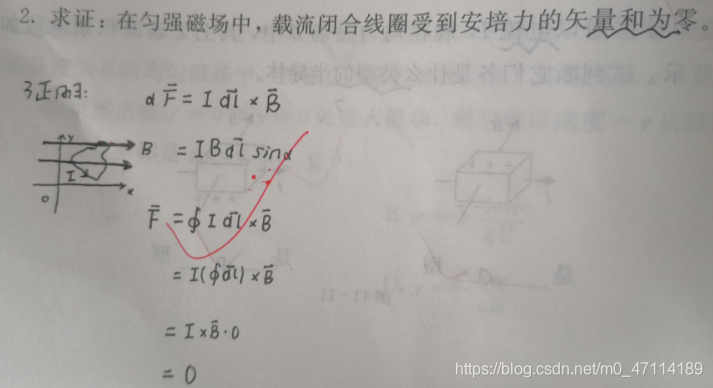
F = ∫ L I d l × B F = \int_LIdl\times B F=∫LIdl×B
[闭合载流线圈在匀强磁场中收到的安培力矢量和为零]
磁力矩:
p → m = I S n → \overrightarrow p_m = IS\overrightarrow n pm=ISn [按电流方向用右手螺旋法则确定n的正向]
M → = p → m × B → \overrightarrow M=\overrightarrow p_m\times \overrightarrow B M=pm×B
磁力的功:
当回路电流不变时,磁力所做的功等于电流乘以通过回路所包围面积内的磁通量的增量。 A = I Δ ϕ A = I\Delta \phi A=IΔϕ
(载流线圈可以看做磁偶极子)磁偶极子在任意位置 ϕ \phi ϕ的势能 W W W,按势能计算定义有: W = − p → m ⋅ B → W = -\overrightarrow p_m\cdot \overrightarrow B W=−pm⋅B
②带电粒子在磁场中的运动
洛伦兹力: F = q v × B F=qv\times B F=qv×B
洛伦兹力F的一个一个重要特点是它始终垂直于速度v,因此洛伦兹力只改变带电运动粒子的运动方向,不改变它的速度的大小。
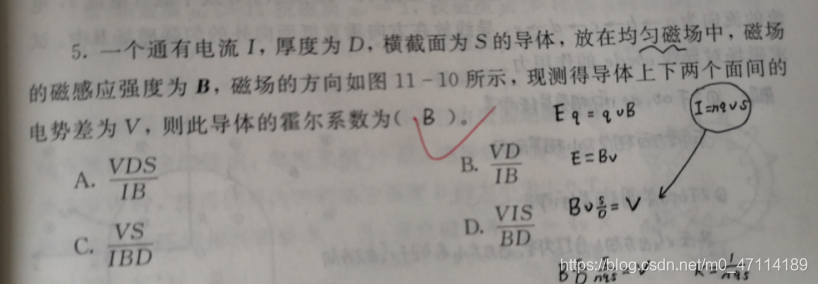
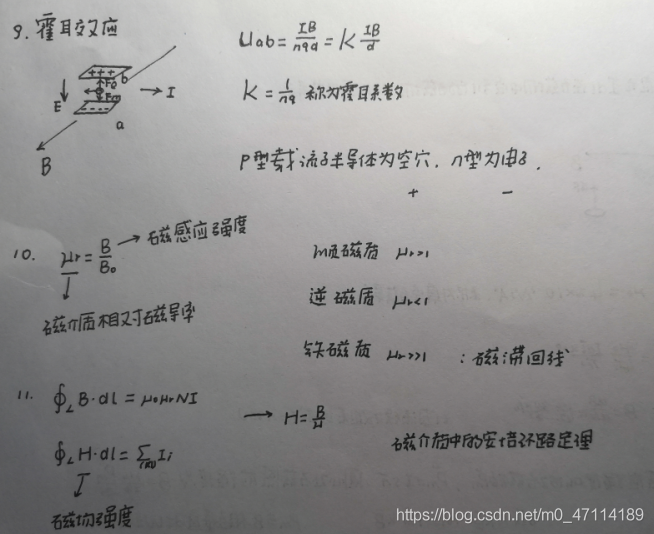
重要应用:霍尔效应
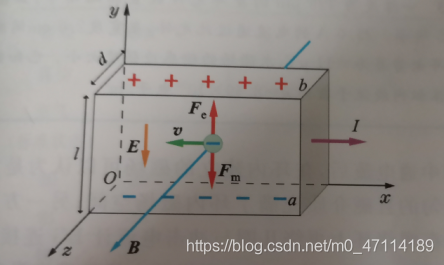
F m = q v B F_m = qvB Fm=qvB
F e = E q F_e = Eq Fe=Eq
F m = F e F_m = F_e Fm=Fe
则 U a b = I B n q d = K I B d U_{ab} = \frac{IB}{nqd} = K\frac{IB}{d} Uab=nqdIB=KdIB,其中 K = 1 n q K = \frac{1}{nq} K=nq1称为霍尔系数
若元件间流动的粒子是正电荷则该元件叫P型半导体,若元件间流动的粒子是负电荷则该元件叫N型半导体。
6、磁介质
磁介质的相对磁导率 μ r = B B 0 \mu_r = \frac{B}{B_0} μr=B0B
磁化率: χ m = μ r − 1 \chi_m = \mu_r -1 χm=μr−1
1)顺磁质: μ r > 1 \mu_r>1 μr>1, χ m > 0 \chi_m>0 χm>0
2)逆磁质: μ r < 1 \mu_r<1 μr<1, χ m < 0 \chi_m<0 χm<0
3)铁磁质: μ r > > 1 \mu_r>>1 μr>>1, χ m 甚 大 \chi_m甚大 χm甚大
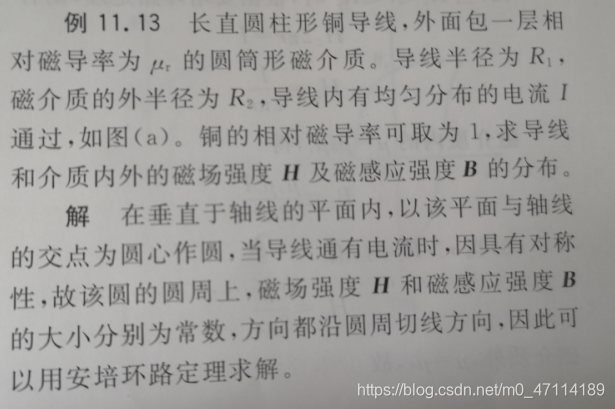
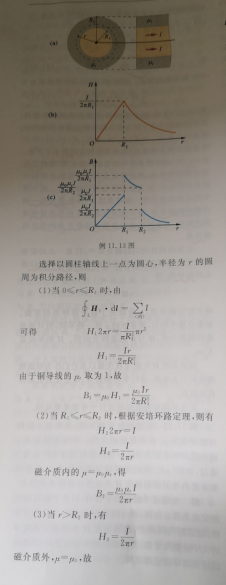
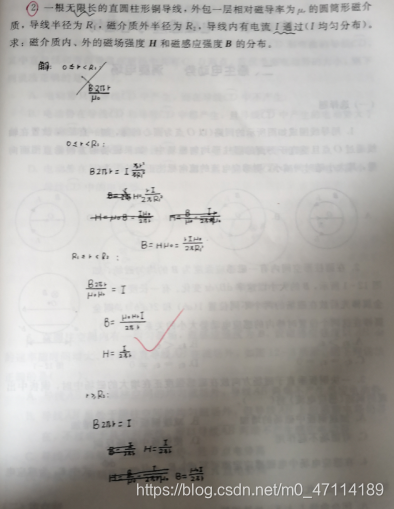
磁介质的安培环路定理:
B = μ H = μ r μ 0 H B = \mu H = \mu_r \mu_0 H B=μH=μrμ0H
∫ L = H ⋅ d l = Σ I \int_L = H\cdot dl = \Sigma I ∫L=H⋅dl=ΣI
H矢量沿任意闭合路径的先积分,等于该闭合路径所包围传导电流的代数和,与束缚电流以及闭合路径之外的传导电流无关。
铁磁质产生的原因是具有磁畴,铁磁质有磁滞现象。
习题精选




期中复习总结



电磁场
知识点总结
1、电磁感应的定义
“不论用什么方法,只要穿越导体闭合回路的磁通量发生改变,此回路中就会产生电流”
非静电力把单位正电荷从负极通过电源内部搬运到正极所做的功,用 ε \varepsilon ε表示
即 ε = ∫ a b E k ⋅ d l \varepsilon = \int_a^bE_k\cdot dl ε=∫abEk⋅dl( u a b = − ε a b u_{ab} = -\varepsilon_{ab} uab=−εab)
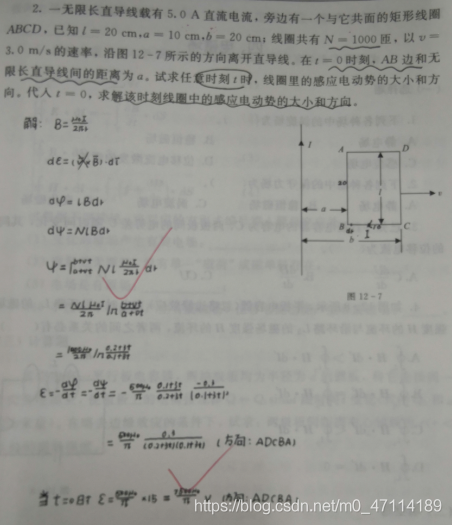
电磁感应定律:导体回路中产生的感应电动势 ε i \varepsilon_i εi的大小与穿过回路的磁通量的变化成正比。即 ε i = − N d Φ d t \varepsilon_i = -\frac{Nd\Phi}{dt} εi=−dtNdΦ
楞次定律:闭合回路中,感应电流的方向总是使得它自身所产生的磁通量反抗引起感应电流的磁通量变化。
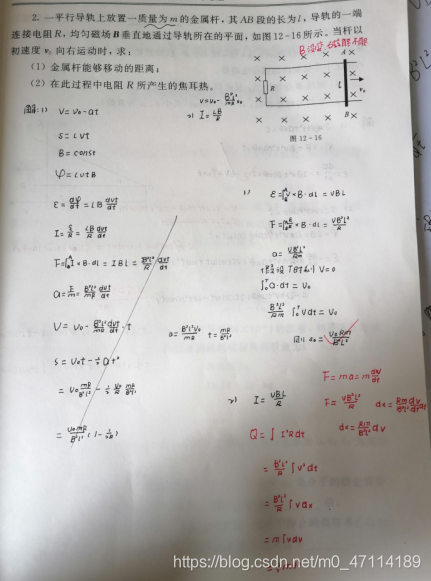
2、感生电动势和动生电动势
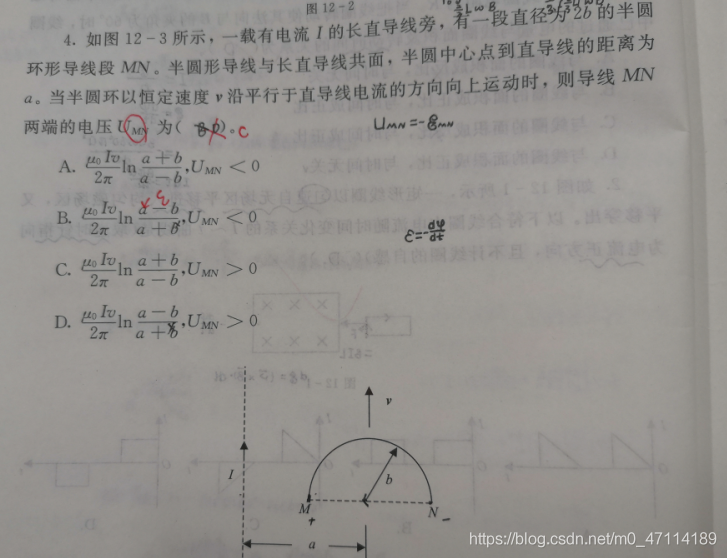
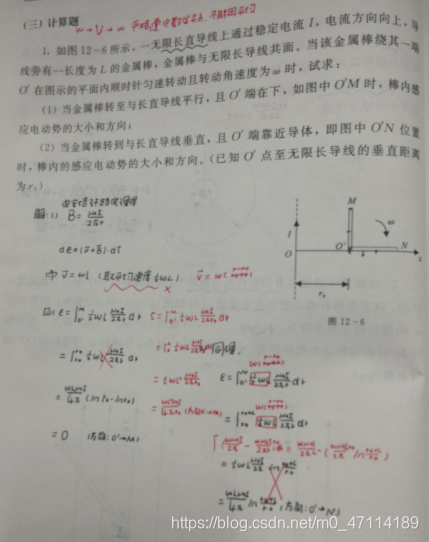
动生电动势: ε i = ∫ a b E k ⋅ d l = ∫ a b ( v × B ) ⋅ d l \varepsilon_i = \int_a^bE_k\cdot dl = \int_a^b(v\times B)\cdot dl εi=∫abEk⋅dl=∫ab(v×B)⋅dl

对于导体回路在磁场中移动所产生的动生电动势建议用电磁感应定义式求解容易。
感生电动势:
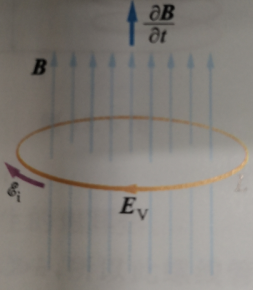
变化的磁场在周围空间激发出电场线为闭合曲线的电场,称其为感生电场或有旋电场。
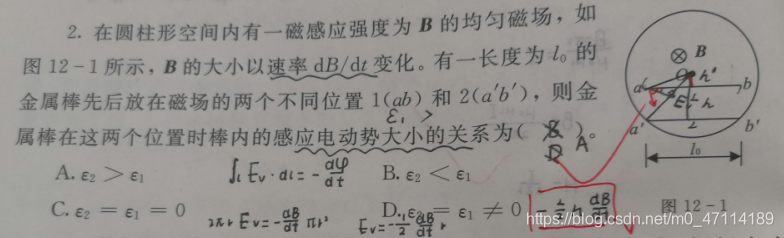
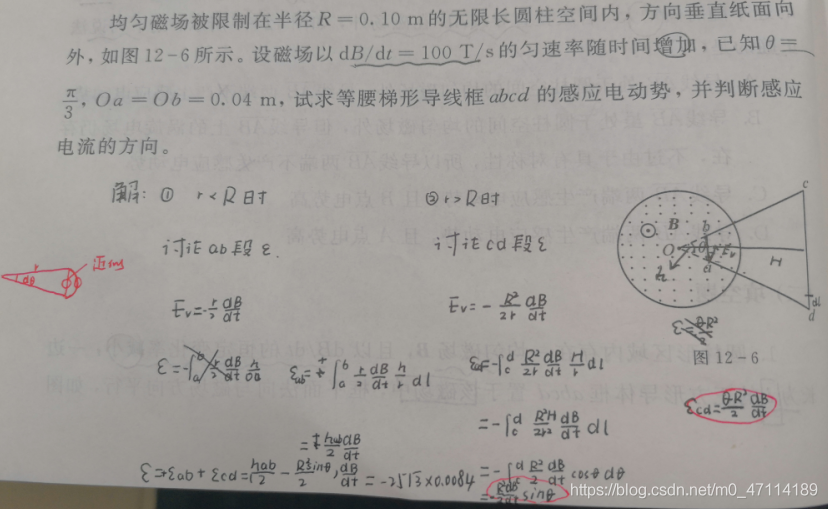
ε i = ∫ L E v ⋅ d l = − ∬ s ∂ B ∂ t ⋅ d S \varepsilon_i = \int_L E_v\cdot dl = -\iint_s\frac{\partial B}{\partial t}\cdot dS εi=∫LEv⋅dl=−∬s∂t∂B⋅dS
有: 2 π r E v = − d B d t π r 2 2\pi rE_v = -\frac{dB}{dt}\pi r^2 2πrEv=−dtdBπr2,则 E v = − d B d t r 2 E_v = -\frac{dB}{dt}\frac{r}{2} Ev=−dtdB2r
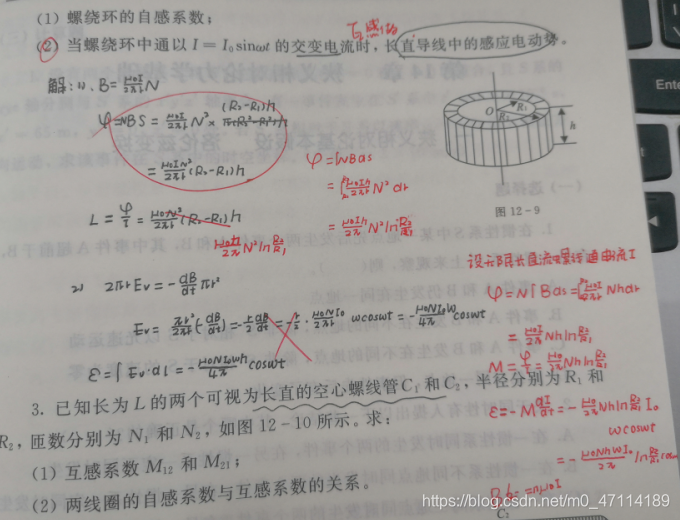
3、自感和互感
自感:导体回路中由自身电流变化,而在自身回路中产生感应电动势的现象
ψ = L I \psi = LI ψ=LI
ε i = − d ψ d t = − L d I d t \varepsilon_i = -\frac{d\psi}{dt} = -L\frac{dI}{dt} εi=−dtdψ=−LdtdI
互感:由于某一个导体回路中的电流发生变化,而在临近导体回路内产生感应电动势的现象
ψ 21 = M 21 I 1 \psi_{21} = M_{21}I_1 ψ21=M21I1 and ψ 12 = M 12 I 2 \psi_{12} = M_{12}I_2 ψ12=M12I2
M 12 = M 21 = M M_{12} = M_{21} = M M12=M21=M
ε 21 = − d ψ 21 d t = − M d I 1 d t \varepsilon_{21} = -\frac{d\psi_{21}}{dt} = -M\frac{dI_1}{dt} ε21=−dtdψ21=−MdtdI1 and ε 12 = − d ψ 12 d t = − M d I 2 d t \varepsilon_{12} = -\frac{d\psi_{12}}{dt} = -M\frac{dI_2}{dt} ε12=−dtdψ12=−MdtdI2
一些结论:
L 1 L 2 = M \sqrt{L_1L_2} = M L1L2=M
顺串联: L = L 1 + L 2 + 2 k L 1 L 2 L = L_1+L_2+2k\sqrt{L_1L_2} L=L1+L2+2kL1L2
反串联: L = L 1 + L 2 − 2 k L 1 L 2 L = L_1+L_2-2k\sqrt{L_1L_2} L=L1+L2−2kL1L2
无漏磁耦合:k = 1
松耦合:k = 0
求自感系数的方法:①定义式(两个)②磁能
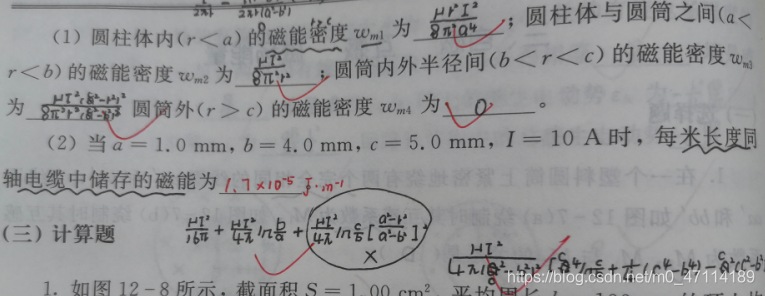
4、磁能
对于一个自感系数为L,通有电流I的线圈,其中所储存的磁能为 W m = 1 2 L I 2 W_m = \frac{1}{2}LI^2 Wm=21LI2
且有:
磁能: W m = 1 2 B H V = B 2 2 μ V W_m = \frac{1}{2}BHV = \frac{B^2}{2\mu}V Wm=21BHV=2μB2V(对于这个V通常需要积分)
磁能密度: w m = 1 2 B H w_m = \frac{1}{2}BH wm=21BH
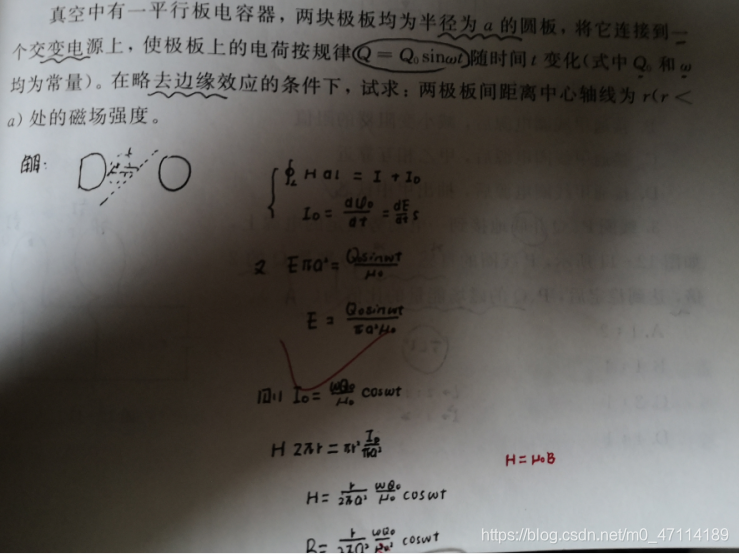
5、麦克斯韦电磁场理论简介
位移电流:麦克斯韦把电位移通量的变化率 d ϕ D / d t d\phi_D/dt dϕD/dt称为位移电流 I D I_D ID,即
I D = d ϕ D d t I_D = \frac{d\phi_D}{dt} ID=dtdϕD
在非稳恒电流下,安培环路定理可以推广为:
∫ L H ⋅ d l = I + I D \int_LH\cdot dl = I+I_D ∫LH⋅dl=I+ID
麦克斯韦位移电流的假设实质上是变化的电场可以产生磁场
麦克斯韦方程组(积分形式):
∫ S D ⋅ d S = Σ i q i \int_S D \cdot dS = \Sigma_i q_i ∫SD⋅dS=Σiqi
∫ L E ⋅ d l = − ∬ S ∂ B ∂ t ⋅ d S \int_L E \cdot dl = -\iint_S \frac{\partial B}{\partial t}\cdot dS ∫LE⋅dl=−∬S∂t∂B⋅dS
∫ S B ⋅ d S = 0 \int_S B \cdot dS = 0 ∫SB⋅dS=0
∫ L H ⋅ d l = Σ ( I D + I ) \int_L H \cdot dl = \Sigma(I_D+I) ∫LH⋅dl=Σ(ID+I)
习题精选




狭义相对论力学基础
知识点总结
1、在彼此作匀速直线运动的所有惯性参考系中,物体运动所遵循的力学规律是完全相同的,应具有完全相同的数学表达形式。也就是说,在描述力学现象的规律而言,所有惯性参考系都是等价的,这称为力学相对性原理。
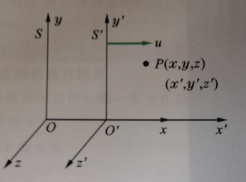
2、绝对时空观
伽利略坐标变换式:
x ′ = x − u t x' = x - ut x′=x−ut
y ′ = y y' = y y′=y
z ′ = z z' = z z′=z
t ′ = t t' = t t′=t
牛顿运动定理具有伽利略变换不变性
3、狭义相对论的两个基本假设
①在所有惯性系中,一切物理学定律都相同,即具有相同的数学表达式。或者说对于描述一切物理现象的规律来说,所有惯性系都是等价的。称为狭义相对论相对性原理
②在所有惯性系中,真空中光沿各个方向传播的速率都等于一个恒量c,与光源和观察者的运动状态无关。称为光速不变原理
4、狭义相对论的时空观
注意:这些效应只发生在运动方向上
时间延缓效应(钟慢效应): τ = τ 0 1 − ( u c ) 2 = γ τ 0 \tau = \frac{\tau_0}{\sqrt{1-(\frac{u}{c})^2}} = \gamma\tau_0 τ=1−(cu)2τ0=γτ0
长度收缩(尺缩效应): L ′ = L 1 − ( u c ) 2 L' = L\sqrt{1-(\frac{u}{c})^2} L′=L1−(cu)2
5、洛伦兹变换
注意:时刻记住在狭义相对论中一切都是相对而言的,飞船以0.8c的速度沿x正方向飞过(你静止),与你以0.8c的速度沿x负方向飞过(飞船静止)是等价的,即站在不同的参考系考虑问题,其结果具有相对性。
x ′ = x − u t 1 − β 2 x' = \frac{x-ut}{\sqrt{1-\beta^2}} x′=1−β2x−ut
t ′ = t − u c 2 x 1 − β 2 t' = \frac{t-\frac{u}{c^2}x}{\sqrt{1-\beta^2}} t′=1−β2t−c2ux
y ′ = y y' = y y′=y
z ′ = z z' = z z′=z
如果要将式子反向,只需要将带撇和不带撇的互换,u给负号即可。
下面是一种推导:

空间间隔和时间间隔
x ′ = Δ x − u Δ t 1 − β 2 x' = \frac{\Delta x-u\Delta t}{\sqrt{1-\beta^2}} x′=1−β2Δx−uΔt
t ′ = Δ t − u c 2 Δ x 1 − β 2 t' = \frac{\Delta t-\frac{u}{c^2}\Delta x}{\sqrt{1-\beta^2}} t′=1−β2Δt−c2uΔx
如果要将式子反向,只需要将带撇和不带撇的互换,u给负号即可。
爱因斯坦速度相加定理
v x ′ = d x ′ d t ′ = v x − u 1 − u c 2 v x v_x' = \frac{dx'}{dt'} = \frac{v_x - u}{1-\frac{u}{c^2}v_x} vx′=dt′dx′=1−c2uvxvx−u
v y ′ = d y ′ d t ′ = v y 1 − β 2 1 − u c 2 v x v_y' = \frac{dy'}{dt'} = \frac{v_y\sqrt{1-\beta^2}}{1-\frac{u}{c^2}v_x} vy′=dt′dy′=1−c2uvxvy1−β2
v x ′ = d z ′ d t ′ = v z 1 − β 2 1 − u c 2 v x v_x' = \frac{dz'}{dt'} = \frac{v_z\sqrt{1-\beta^2}}{1-\frac{u}{c^2}v_x} vx′=dt′dz′=1−c2uvxvz1−β2
6、狭义相对论质点运动学简介
m = m 0 1 − ( v c ) 2 m = \frac{m_0}{\sqrt{1-(\frac{v}{c})^2}} m=1−(cv)2m0
p = m v = m 0 1 − ( v c ) 2 v p = mv = \frac{m_0}{\sqrt{1-(\frac{v}{c})^2}}v p=mv=1−(cv)2m0v
E k = E − E 0 = m c 2 − m 0 c 2 E_k = E - E_0 = mc^2 - m_0c^2 Ek=E−E0=mc2−m0c2
E 2 = p 2 c 2 + E 0 2 E^2 = p^2c^2 + E_0^2 E2=p2c2+E02
F与a不一定同向,大小也不一定正比: F = d p d t F = \frac{dp}{dt} F=dtdp
对于光子的能量E为: E = h μ E = h\mu E=hμ
对于光子的动量p为: p = m c = h μ c = h λ p = mc = \frac{h\mu}{c} = \frac{h}{\lambda} p=mc=chμ=λh