cube Gated Mode定时器同步
- 遇到的问题
- 主从模式介绍(参考)
- 解决方法
- 定时器代码和开启代码
遇到的问题
在改造一块无刷电机电调时,遇到一些问题,其中就有:两个定时器分别是三个PWM的H和L驱动脚,当直接设置timer2timer3PWM模式输出时,开启定时器后其波形不互补,为此我特地查阅主从模式触发相关资料,解决该问题。

主从模式介绍(参考)

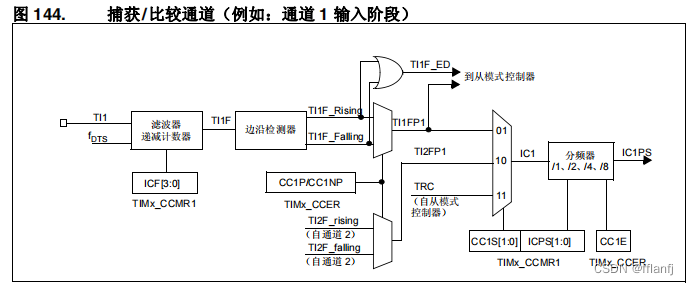
定时器与外部触发的同步
1.复位模式:计数器使用内部时钟计数,然后正常运转,直到出现TI1上升沿,当TI1出现上升沿时,计数器清零然后重新从零开始计数。TI1上升沿与实际计数器复位之间的延迟是由于TI1输入的重新同步电路引起的。
2.门控模式:低电平计数,高电平不计数
3.触发模式:原本不计数,检测TI2上升沿,计数器启动。(默认为内部CLK)
4.外部时钟模式2 + 触发模式:用ETR作为时钟信号。
定时器同步
1.一个定时器作为另一个定时器的预分频器。
2.一个定时器使能另一个定时器。
3.一个定时器启动另一个定时器。
4.使用一个外部触发同步地启动2个定时器。
链接https://blog.csdn.net/weixin_42263208/article/details/112845804
解决方法

我将上面几个都尝试了一下,发现Gated Mode好使,走的弯路就不赘述了,我要让timer3和timer4同步,于是我将timer2打开,不分频,计数为1,然后使能主模式,接着将timer3timer4从模式设置为Gated Mode,查表选择ITR1的源,即定时器3 4都在定时器2的控制下同步。完成配置后,先打开定时器34 再开启定时器2。问题解决!

定时器代码和开启代码
// main.c主要
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2); //开启pwm3HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_1); //开启pwm4HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_3); //开启pwm3HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_2); //开启pwm4HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_4); //开启pwm3HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3); //开启pwm4HAL_TIM_Base_Start(&htim2); //打开定时器
// tim.c
/********************************************************************************* @file tim.c* @brief This file provides code for the configuration* of the TIM instances.******************************************************************************* @attention** <h2><center>© Copyright (c) 2021 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************//* Includes ------------------------------------------------------------------*/
#include "tim.h"/* USER CODE BEGIN 0 *//* USER CODE END 0 */TIM_HandleTypeDef htim2;
TIM_HandleTypeDef htim3;
TIM_HandleTypeDef htim4;/* TIM2 init function */
void MX_TIM2_Init(void)
{/* USER CODE BEGIN TIM2_Init 0 *//* USER CODE END TIM2_Init 0 */TIM_MasterConfigTypeDef sMasterConfig = {0};TIM_IC_InitTypeDef sConfigIC = {0};/* USER CODE BEGIN TIM2_Init 1 *//* USER CODE END TIM2_Init 1 */htim2.Instance = TIM2;htim2.Init.Prescaler = 0;htim2.Init.CounterMode = TIM_COUNTERMODE_UP;htim2.Init.Period = 1;htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;if (HAL_TIM_IC_Init(&htim2) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_UPDATE;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_ENABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK){Error_Handler();}sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;sConfigIC.ICFilter = 0;if (HAL_TIM_IC_ConfigChannel(&htim2, &sConfigIC, TIM_CHANNEL_1) != HAL_OK){Error_Handler();}/* USER CODE BEGIN TIM2_Init 2 *//* USER CODE END TIM2_Init 2 */}
/* TIM3 init function */
void MX_TIM3_Init(void)
{/* USER CODE BEGIN TIM3_Init 0 *//* USER CODE END TIM3_Init 0 */TIM_SlaveConfigTypeDef sSlaveConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};TIM_OC_InitTypeDef sConfigOC = {0};/* USER CODE BEGIN TIM3_Init 1 *//* USER CODE END TIM3_Init 1 */htim3.Instance = TIM3;htim3.Init.Prescaler = 0;htim3.Init.CounterMode = TIM_COUNTERMODE_UP;htim3.Init.Period = 1800-1;htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;if (HAL_TIM_Base_Init(&htim3) != HAL_OK){Error_Handler();}if (HAL_TIM_PWM_Init(&htim3) != HAL_OK){Error_Handler();}sSlaveConfig.SlaveMode = TIM_SLAVEMODE_GATED;sSlaveConfig.InputTrigger = TIM_TS_ITR1;if (HAL_TIM_SlaveConfigSynchro(&htim3, &sSlaveConfig) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_ENABLE;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK){Error_Handler();}sConfigOC.OCMode = TIM_OCMODE_PWM1;sConfigOC.Pulse = 450;sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_2) != HAL_OK){Error_Handler();}sConfigOC.Pulse = 900;if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_3) != HAL_OK){Error_Handler();}sConfigOC.Pulse = 1350;if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_4) != HAL_OK){Error_Handler();}/* USER CODE BEGIN TIM3_Init 2 *//* USER CODE END TIM3_Init 2 */HAL_TIM_MspPostInit(&htim3);}
/* TIM4 init function */
void MX_TIM4_Init(void)
{/* USER CODE BEGIN TIM4_Init 0 *//* USER CODE END TIM4_Init 0 */TIM_SlaveConfigTypeDef sSlaveConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};TIM_OC_InitTypeDef sConfigOC = {0};/* USER CODE BEGIN TIM4_Init 1 *//* USER CODE END TIM4_Init 1 */htim4.Instance = TIM4;htim4.Init.Prescaler = 0;htim4.Init.CounterMode = TIM_COUNTERMODE_UP;htim4.Init.Period = 1800-1;htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;if (HAL_TIM_Base_Init(&htim4) != HAL_OK){Error_Handler();}if (HAL_TIM_PWM_Init(&htim4) != HAL_OK){Error_Handler();}sSlaveConfig.SlaveMode = TIM_SLAVEMODE_GATED;sSlaveConfig.InputTrigger = TIM_TS_ITR1;if (HAL_TIM_SlaveConfigSynchro(&htim4, &sSlaveConfig) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_ENABLE;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK){Error_Handler();}sConfigOC.OCMode = TIM_OCMODE_PWM1;sConfigOC.Pulse = 450;sConfigOC.OCPolarity = TIM_OCPOLARITY_LOW;sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;if (HAL_TIM_PWM_ConfigChannel(&htim4, &sConfigOC, TIM_CHANNEL_1) != HAL_OK){Error_Handler();}sConfigOC.Pulse = 900;if (HAL_TIM_PWM_ConfigChannel(&htim4, &sConfigOC, TIM_CHANNEL_2) != HAL_OK){Error_Handler();}sConfigOC.Pulse = 1350;if (HAL_TIM_PWM_ConfigChannel(&htim4, &sConfigOC, TIM_CHANNEL_3) != HAL_OK){Error_Handler();}/* USER CODE BEGIN TIM4_Init 2 *//* USER CODE END TIM4_Init 2 */HAL_TIM_MspPostInit(&htim4);}void HAL_TIM_IC_MspInit(TIM_HandleTypeDef* tim_icHandle)
{GPIO_InitTypeDef GPIO_InitStruct = {0};if(tim_icHandle->Instance==TIM2){/* USER CODE BEGIN TIM2_MspInit 0 *//* USER CODE END TIM2_MspInit 0 *//* TIM2 clock enable */__HAL_RCC_TIM2_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();/**TIM2 GPIO ConfigurationPA0-WKUP ------> TIM2_CH1*/GPIO_InitStruct.Pin = GPIO_PIN_0;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/* USER CODE BEGIN TIM2_MspInit 1 *//* USER CODE END TIM2_MspInit 1 */}
}void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{if(tim_baseHandle->Instance==TIM3){/* USER CODE BEGIN TIM3_MspInit 0 *//* USER CODE END TIM3_MspInit 0 *//* TIM3 clock enable */__HAL_RCC_TIM3_CLK_ENABLE();/* TIM3 interrupt Init */HAL_NVIC_SetPriority(TIM3_IRQn, 0, 0);HAL_NVIC_EnableIRQ(TIM3_IRQn);/* USER CODE BEGIN TIM3_MspInit 1 *//* USER CODE END TIM3_MspInit 1 */}else if(tim_baseHandle->Instance==TIM4){/* USER CODE BEGIN TIM4_MspInit 0 *//* USER CODE END TIM4_MspInit 0 *//* TIM4 clock enable */__HAL_RCC_TIM4_CLK_ENABLE();/* USER CODE BEGIN TIM4_MspInit 1 *//* USER CODE END TIM4_MspInit 1 */}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle)
{GPIO_InitTypeDef GPIO_InitStruct = {0};if(timHandle->Instance==TIM3){/* USER CODE BEGIN TIM3_MspPostInit 0 *//* USER CODE END TIM3_MspPostInit 0 */__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/**TIM3 GPIO ConfigurationPA7 ------> TIM3_CH2PB0 ------> TIM3_CH3PB1 ------> TIM3_CH4*/GPIO_InitStruct.Pin = A_L_Pin;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(A_L_GPIO_Port, &GPIO_InitStruct);GPIO_InitStruct.Pin = B_L_Pin|C_L_Pin;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/* USER CODE BEGIN TIM3_MspPostInit 1 *//* USER CODE END TIM3_MspPostInit 1 */}else if(timHandle->Instance==TIM4){/* USER CODE BEGIN TIM4_MspPostInit 0 *//* USER CODE END TIM4_MspPostInit 0 */__HAL_RCC_GPIOB_CLK_ENABLE();/**TIM4 GPIO ConfigurationPB6 ------> TIM4_CH1PB7 ------> TIM4_CH2PB8 ------> TIM4_CH3*/GPIO_InitStruct.Pin = A_H_Pin|B_H_Pin|C_H_Pin;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/* USER CODE BEGIN TIM4_MspPostInit 1 *//* USER CODE END TIM4_MspPostInit 1 */}}void HAL_TIM_IC_MspDeInit(TIM_HandleTypeDef* tim_icHandle)
{if(tim_icHandle->Instance==TIM2){/* USER CODE BEGIN TIM2_MspDeInit 0 *//* USER CODE END TIM2_MspDeInit 0 *//* Peripheral clock disable */__HAL_RCC_TIM2_CLK_DISABLE();/**TIM2 GPIO ConfigurationPA0-WKUP ------> TIM2_CH1*/HAL_GPIO_DeInit(GPIOA, GPIO_PIN_0);/* USER CODE BEGIN TIM2_MspDeInit 1 *//* USER CODE END TIM2_MspDeInit 1 */}
}void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{if(tim_baseHandle->Instance==TIM3){/* USER CODE BEGIN TIM3_MspDeInit 0 *//* USER CODE END TIM3_MspDeInit 0 *//* Peripheral clock disable */__HAL_RCC_TIM3_CLK_DISABLE();/* TIM3 interrupt Deinit */HAL_NVIC_DisableIRQ(TIM3_IRQn);/* USER CODE BEGIN TIM3_MspDeInit 1 *//* USER CODE END TIM3_MspDeInit 1 */}else if(tim_baseHandle->Instance==TIM4){/* USER CODE BEGIN TIM4_MspDeInit 0 *//* USER CODE END TIM4_MspDeInit 0 *//* Peripheral clock disable */__HAL_RCC_TIM4_CLK_DISABLE();/* USER CODE BEGIN TIM4_MspDeInit 1 *//* USER CODE END TIM4_MspDeInit 1 */}
}/* USER CODE BEGIN 1 *//* USER CODE END 1 *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/




![[JavaEE]定时器](https://img-blog.csdnimg.cn/3e689866c9b9496196484c48de5f750e.png)