Apollo studio 官网:Apollo开发者社区 (baidu.com)
星火计划2.0基础课:Apollo星火计划2.0_Apollo精品课 (baidu.com)
星火计划2.0专项课:Apollo星火计划之PnC专项_Apollo精品课 (baidu.com)
目录
1 基于规则的停止决策概览
2 代码流程
2.1 Stop on side pass
2.2 Check lane change Urgency
2.3 Add path end stop
1 基于规则的停止决策概览
//输入
apollo::common::Status RuleBasedStopDecider::Process(Frame *const frame, ReferenceLineInfo *const reference_line_info)
//输入是frame和reference_line_info
//输出
输出保存到reference_line_info2 代码流程
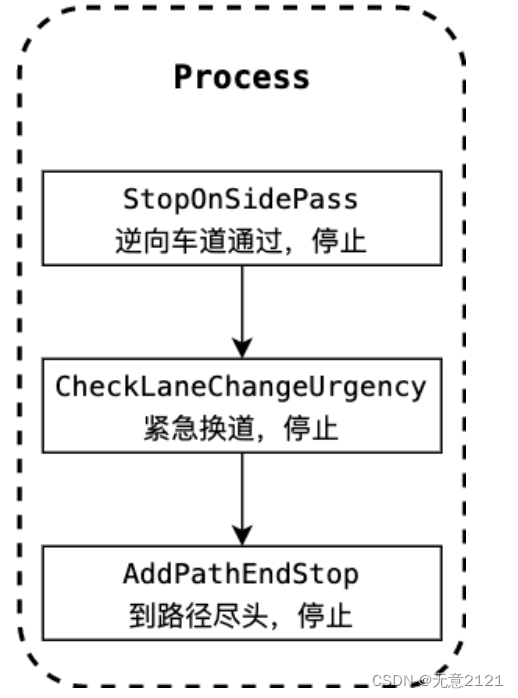
基于规则,碰到以上三种情况,会进行停止决策
apollo::common::Status RuleBasedStopDecider::Process(Frame *const frame, ReferenceLineInfo *const reference_line_info) {// 1. 逆向车道通过,停止StopOnSidePass(frame, reference_line_info);// 2. 紧急换道,停止if (FLAGS_enable_lane_change_urgency_checking) {CheckLaneChangeUrgency(frame);}// 3. 路径尽头,停止AddPathEndStop(frame, reference_line_info);return Status::OK();
}2.1 Stop on side pass
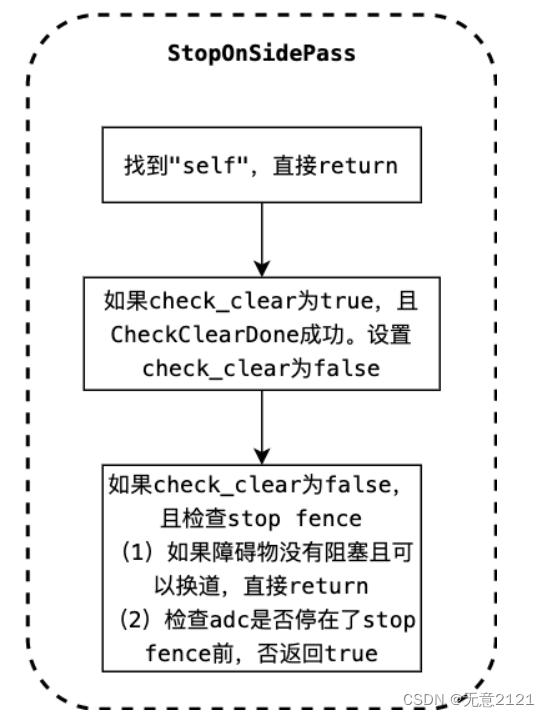
void RuleBasedStopDecider::StopOnSidePass(Frame *const frame, ReferenceLineInfo *const reference_line_info) {static bool check_clear; // 默认falsestatic common::PathPoint change_lane_stop_path_point;// 获取path_dataconst PathData &path_data = reference_line_info->path_data();double stop_s_on_pathdata = 0.0;// 1. 找到"self",直接returnif (path_data.path_label().find("self") != std::string::npos) {check_clear = false;change_lane_stop_path_point.Clear();return;}// 2. 如果check_clear为true,且CheckClearDone成功。设置check_clear为falseif (check_clear &&CheckClearDone(*reference_line_info, change_lane_stop_path_point)) {check_clear = false;}// 3.如果check_clear为false,且检查stop fenceif (!check_clear &&CheckSidePassStop(path_data, *reference_line_info, &stop_s_on_pathdata)) {// 3.1 如果障碍物没有阻塞且可以换道,直接returnif (!LaneChangeDecider::IsPerceptionBlocked(*reference_line_info,rule_based_stop_decider_config_.search_beam_length(),rule_based_stop_decider_config_.search_beam_radius_intensity(),rule_based_stop_decider_config_.search_range(),rule_based_stop_decider_config_.is_block_angle_threshold()) &&LaneChangeDecider::IsClearToChangeLane(reference_line_info)) {return;}// 3.2 检查adc是否停在了stop fence前,否返回trueif (!CheckADCStop(path_data, *reference_line_info, stop_s_on_pathdata)) {// 设置stop fence,成功就执行 check_clear = true;if (!BuildSidePassStopFence(path_data, stop_s_on_pathdata,&change_lane_stop_path_point, frame,reference_line_info)) {AERROR << "Set side pass stop fail";}} else {if (LaneChangeDecider::IsClearToChangeLane(reference_line_info)) {check_clear = true;}}}
}2.2 Check lane change Urgency
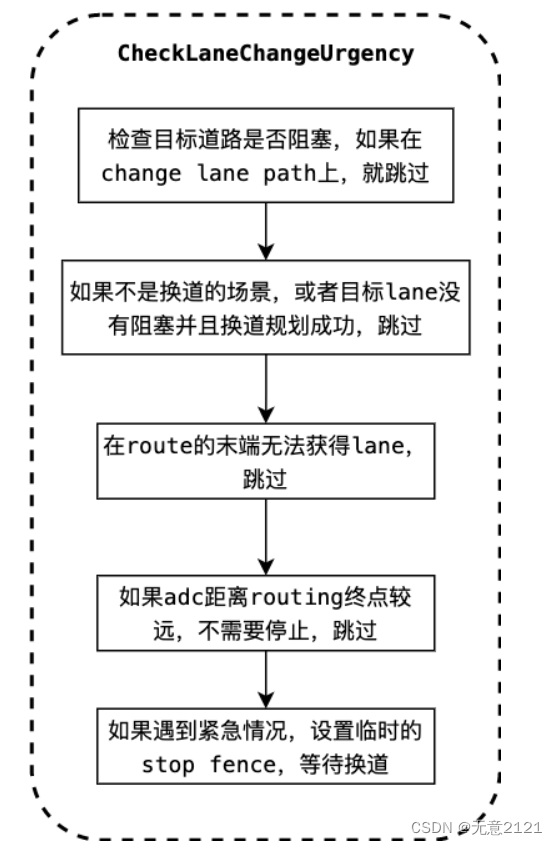
void RuleBasedStopDecider::CheckLaneChangeUrgency(Frame *const frame) {// 直接进入循环,检查每个reference_line_infofor (auto &reference_line_info : *frame->mutable_reference_line_info()) {// 1. 检查目标道路是否阻塞,如果在change lane path上,就跳过if (reference_line_info.IsChangeLanePath()) {is_clear_to_change_lane_ =LaneChangeDecider::IsClearToChangeLane(&reference_line_info);is_change_lane_planning_succeed_ =reference_line_info.Cost() < kStraightForwardLineCost;continue;}// 2.如果不是换道的场景,或者(目标lane没有阻塞)并且换道规划成功,跳过if (frame->reference_line_info().size() <= 1 ||(is_clear_to_change_lane_ && is_change_lane_planning_succeed_)) {continue;}// When the target lane is blocked in change-lane case, check the urgency// Get the end point of current routingconst auto &route_end_waypoint =reference_line_info.Lanes().RouteEndWaypoint();// 3.在route的末端无法获得lane,跳过if (!route_end_waypoint.lane) {continue;}auto point = route_end_waypoint.lane->GetSmoothPoint(route_end_waypoint.s);auto *reference_line = reference_line_info.mutable_reference_line();common::SLPoint sl_point;// 将当前参考线的点映射到frenet坐标系下if (reference_line->XYToSL(point, &sl_point) &&reference_line->IsOnLane(sl_point)) {// Check the distance from ADC to the end point of current routingdouble distance_to_passage_end =sl_point.s() - reference_line_info.AdcSlBoundary().end_s();// 4. 如果adc距离routing终点较远,不需要停止,跳过if (distance_to_passage_end >rule_based_stop_decider_config_.approach_distance_for_lane_change()) {continue;}// 5.如果遇到紧急情况,设置临时的stop fence,等待换道const std::string stop_wall_id = "lane_change_stop";std::vector<std::string> wait_for_obstacles;util::BuildStopDecision(stop_wall_id, sl_point.s(),rule_based_stop_decider_config_.urgent_distance_for_lane_change(),StopReasonCode::STOP_REASON_LANE_CHANGE_URGENCY, wait_for_obstacles,"RuleBasedStopDecider", frame, &reference_line_info);}}
}2.3 Add path end stop
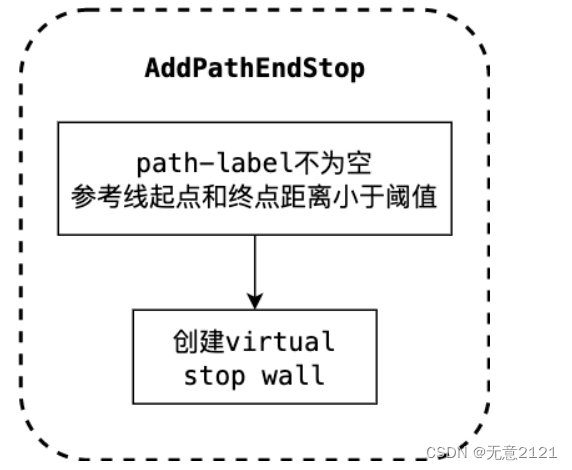
当参考线起点与终点距离小于某个阈值,说明没有办法规划出一条较长的路径,所以我们需要对终点添加stop fence ,这时候需要退出动态重规划的过程,而是在一段距离后停车
void RuleBasedStopDecider::AddPathEndStop(Frame *const frame, ReferenceLineInfo *const reference_line_info) {if (!reference_line_info->path_data().path_label().empty() &&reference_line_info->path_data().frenet_frame_path().back().s() -reference_line_info->path_data().frenet_frame_path().front().s() <FLAGS_short_path_length_threshold) {const std::string stop_wall_id =PATH_END_VO_ID_PREFIX + reference_line_info->path_data().path_label();std::vector<std::string> wait_for_obstacles;// 创建stop fenceutil::BuildStopDecision(stop_wall_id,reference_line_info->path_data().frenet_frame_path().back().s() - 5.0,0.0, StopReasonCode::STOP_REASON_REFERENCE_END, wait_for_obstacles,"RuleBasedStopDecider", frame, reference_line_info);}
}本文参考基于规则的停止决策 — Apollo Auto 0.0.1 文档 (daobook.github.io)
若有侵权,请联系删除