在 十五届全国大学生智能汽车竞赛 中安排后一个 声音信标导航 竞赛组别。参赛同学反馈,声音信标发送的 Chirp信号 在远处听起来会令人产生一种恐慌紧张的感觉,极大扰民。
如果将信标的声音改成同样宽带音频的白噪声信号,在听觉上与Chirp信号有很大区别,但在导航的效果上与Chirp信号相同。
下面是对比两种信号在声音导航效果的异同。
➤01 测试方式
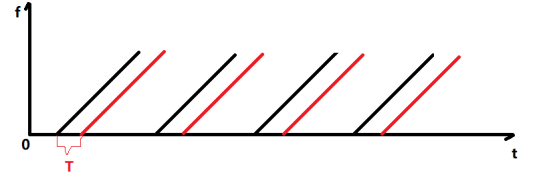
通过 调频接收模块 接收信标发送的调频信号,与麦克接收到的信号通过相关运算,获得声音时间延迟。将两个麦克的延迟时间和调频接收模块获得的信号强度显示在LCD上。

▲ 车模上显示测试结果的液晶
1.显示屏显示说明:
-
第一行显示的是麦克风1到信标的距离,单位是3.14厘米,显示的6也就是距离:
L 1 = 6 × 3.14 = 18.84 c m L_1 = 6 \times 3.14 = 18.84cm L1=6×3.14=18.84cm -
第二行显示的是麦克风2到信标的距离,单位是3.14厘米,显示的11也就是距离:
L 1 = 11 × 3.14 = 34.54 c m L_1 = 11 \times 3.14 = 34.54cm L1=11×3.14=34.54cm -
第三行显示的FM的RSSI(信号强度)。
2.播放Chirp信号时的视频(附件1):
采用原始的chirp信号进行声音导航,从视频中每移动车模一段距离观察一次距离数据是否稳定,从视频中看出大概离信标3米多的时候代表距离的数据开始不稳定了。

▲ 信标播放chirp信号时接收端的信号
- 黄色波形是麦克风接收到的波形
- 蓝色是FM收到的波形
3.播放随机白噪声时的视频(附件2):
采用matlab生成8192个随机白噪声数据,然后用单片机将随机数据按照40K的频率进行播放。8192个数据播放的时间为204.8毫秒。刚好与之前的chirp周期是一致的。
由于单片机的flash较小所以没有办法播放太长的序列。同样,视频中也采用每移动车模一段距离观察一次距离数据是否稳定,从视频中同样可以看出大概离信标3米多的时候代表距离的数据也开始不稳定了。

▲ 信标播放白噪声信号时接收端的信号
-
黄色波形是麦克风接收到的波形
-
蓝色是FM收到的波形并对波形做了一个1MHz 的低通滤波,便于观看波形。
测试的时候车模端的程序是没有改变的, 也就是说测距算法不变的情况下,仅仅只改变信标的声源通过视频我们可以看到两者的效果是比较接近的。
➤02 结果分析
从测试结果来看,播放白噪声的确也可以实现测距,当然也可以实现声音定位,但从实际测试中也有以下疑问:
1.问题1:
从上面的白噪声波形看,如果由人直接判断接收到的波形,很难去分析当前接收到的波形质量是否可靠,因为信号源就是随机的白噪声,没有规律可循,从分析和写程序来说可能没有chirp信号那种波形能给人带来那么直观的感受。

▲ 播放Chirp信号进行测量声音延迟
2.问题2:
相对于chirp信号来说,随机白噪声听起来会更容易让人产生一种心烦的情绪,对做这个组别的同学来说也挺头大的,但相对于之前的chirp信号来说,穿透力确实要弱一些,对于其他人的影响确实要小不少,但也能传比较远。

▲ 播放噪声信号进行测量声音延迟