文章目录
- 凸包(convex hull)
- 凸包(convex hull)
- Graham扫描算法
- API
- 使用步骤:
- Code
- 效果
凸包(convex hull)
1、凸包概念;
2、API说明;
3、代码演示;
convex : 凸面的,凸出的,凸多变形的;
hull : 物体外壳;
凸包(convex hull)
1、凸包(convex hull):在一个多边形边缘或者内部任意两个点的连线都包含在多边形边界或者内部,正式定义为:包含点集合S中所有点的最小凸多边形称为凸包;

凸包和非凸包:
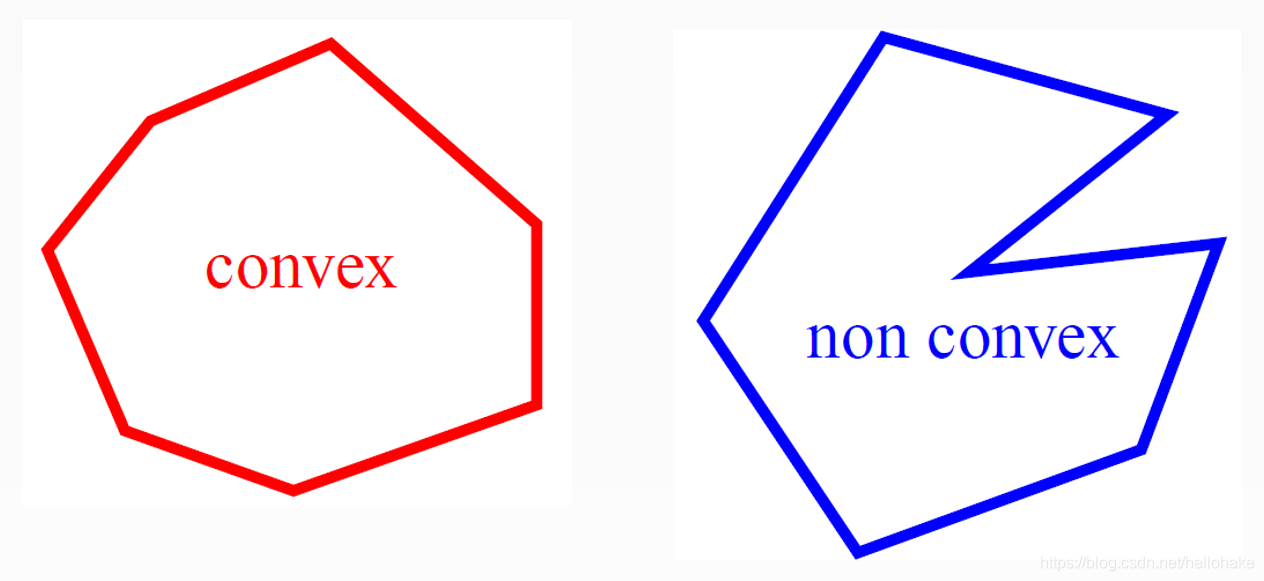
2、凸包是建立在轮廓提取的基础上,OpenCV中提供了2种凸包的实现算法,最常用的为:Graham扫描法;
Graham扫描算法
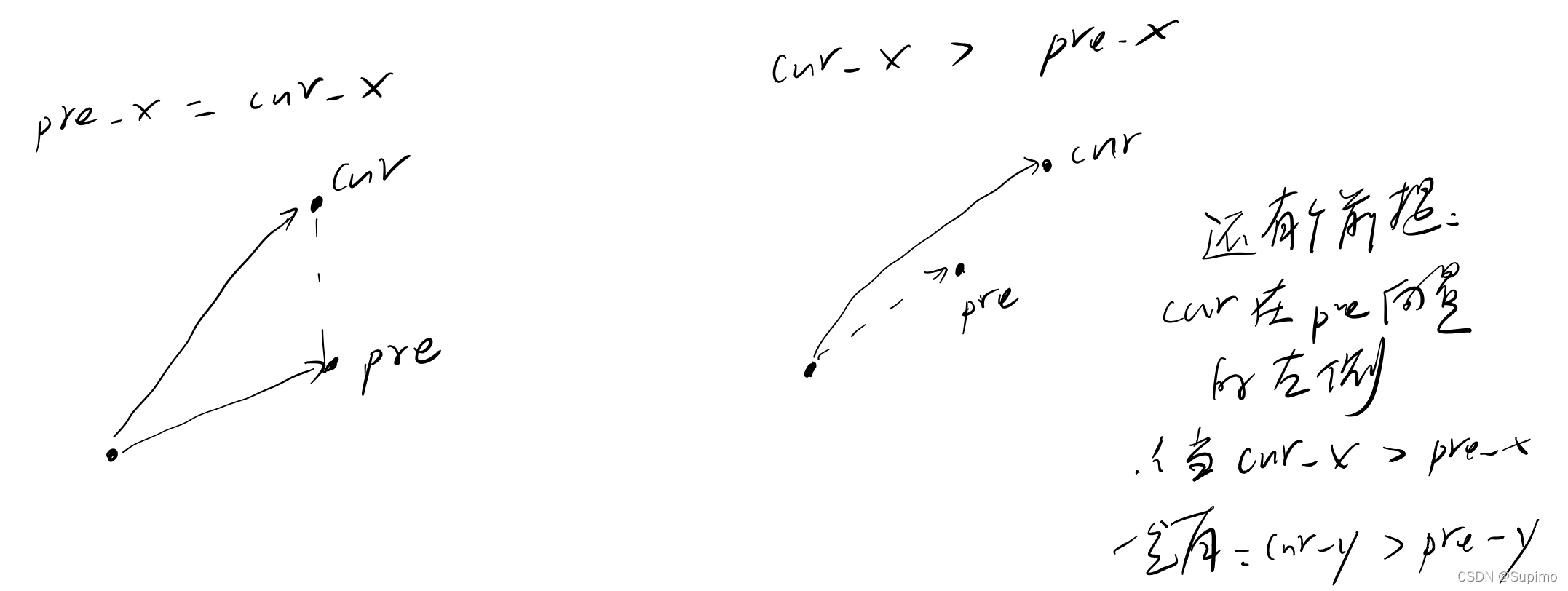
1、原理:
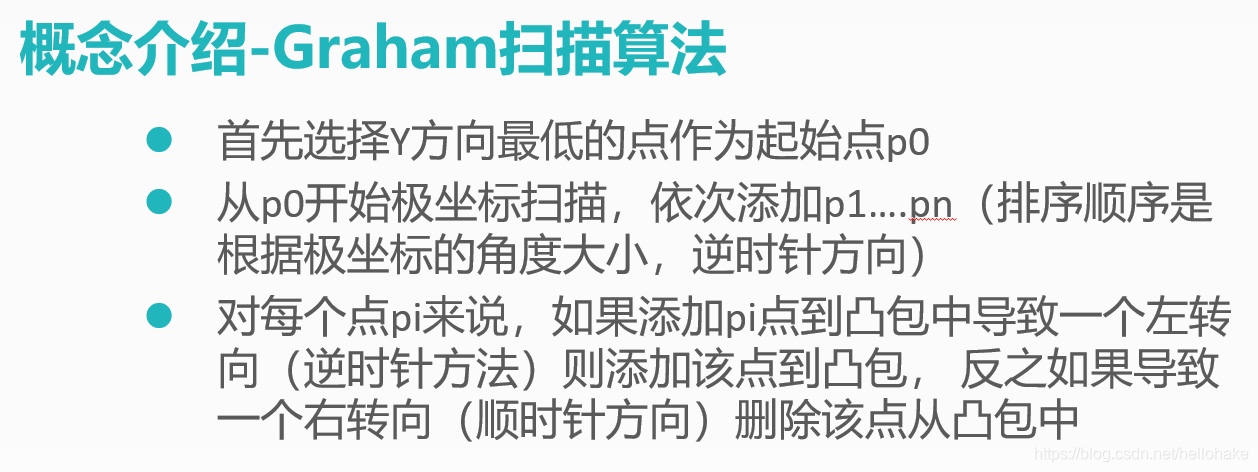
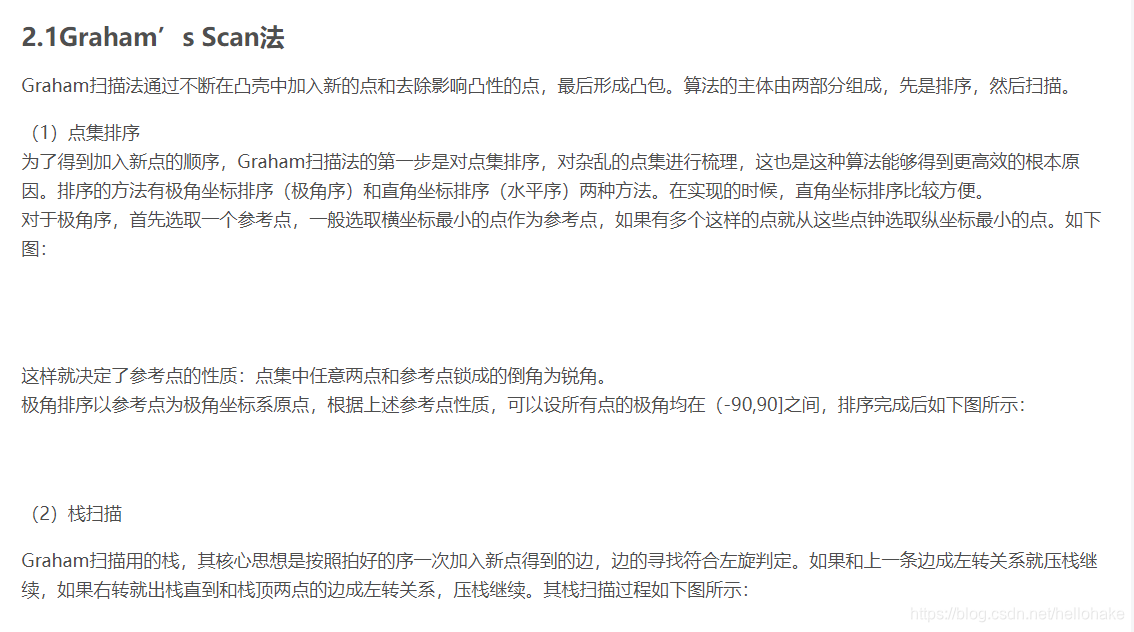
demo : 从Y方向最低点p0开始寻找,C点导致与下一点D的连线右转向,所以舍弃该点;

API
1、凸包API : convexHull()
参数:
points : 输入为轮廓检测发现的点
hull : 凸包;对于hull参数可以为std::vector,这是返回的是凸包点在原轮廓点集中的索引,当为std::vectorcv::Point时,表示的是凸包点的位置
clockwise : 默认为true , 顺时针方向扫描
returnPoints : 返回凸包点的个数,如果hull输入为vector<Point>向量,则自动忽略该值;

2、凸包是一种特殊的轮廓,OpenCV提供了快速进行图像开发的框架;l
使用步骤:
- 将图像从RGB图像转换为灰度图像;
- 再转换为二值图像(Canny边缘检测或者阈值处理转换为二值图像);
- 再通过发现轮廓找到候选点;
- 调用凸包API;
- 绘制显示;
Code
调试:设置断点,F10执行下一条语句;
#include <opencv2/opencv.hpp>
#include <iostream>using namespace std;
using namespace cv;Mat src,src_gray, dst;
int threshold_value = 100;
int threshold_max = 255;RNG rng(12345); //定义一个随机数变量const char *OUTPUT_WIN = "convex hull image";
const char *INPUT_WIN = "input image";void Convexhull_Demo(int, void*);int main(int argc, char** argv)
{src = imread("C:\\Users\\hello\\Desktop\\37.jpg");if (src.empty()){cout << "could not load the image..." << endl;return -1;}namedWindow(INPUT_WIN, WINDOW_AUTOSIZE);namedWindow(OUTPUT_WIN, WINDOW_AUTOSIZE);cvtColor(src, src_gray, CV_BGR2GRAY); //转换为灰度图像//GaussianBlur(src_gray, src_gray, Size(3, 3), 0, 0); //滤波处理blur(src_gray, src_gray, Size(3, 3), Point(-1, -1), BORDER_DEFAULT);imshow(INPUT_WIN, src);createTrackbar("Threshold value:", INPUT_WIN, &threshold_value, threshold_max, Convexhull_Demo);Convexhull_Demo(0, 0);waitKey(0);return 0;
}void Convexhull_Demo(int, void*)
{//进行发现凸包操作Mat binImage;threshold(src_gray, binImage, threshold_value, threshold_max, THRESH_BINARY); //转换为二值图像vector<vector<Point>> contours; //存放发现的轮廓点vector<Vec4i> hierarchy; //hierarchy : 层次//发现轮廓findContours(binImage, contours, hierarchy, RETR_EXTERNAL,CV_CHAIN_APPROX_SIMPLE, Point(0, 0));//注意!!!! hull的声明必须放在findContours()API之后,这样contours才有计算值,不为空!!vector<vector<Point>> hull(contours.size()); //初始化与原始轮廓相同for (size_t i = 0; i < contours.size(); i++) //从所有轮廓中寻找凸包{convexHull(contours[i],hull[i],false,true);//给的数组,true会自动忽略}//绘制轮廓dst = Mat::zeros(src.size(), CV_8UC3); //初始化矩阵内容vector<Vec4i> empty(0);for (size_t k = 0; k < contours.size(); k++){Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)); //产生一个随机颜色drawContours(dst, contours, k, color, 2, LINE_8, hierarchy, 0, Point(0, 0));//绘制轮廓//绘制凸包 此时不能传入层次参数drawContours(dst, hull, k, color, 2, LINE_8, empty, 0, Point(0, 0));//绘制凸包}imshow(OUTPUT_WIN, dst); //显示最终图像return;
}
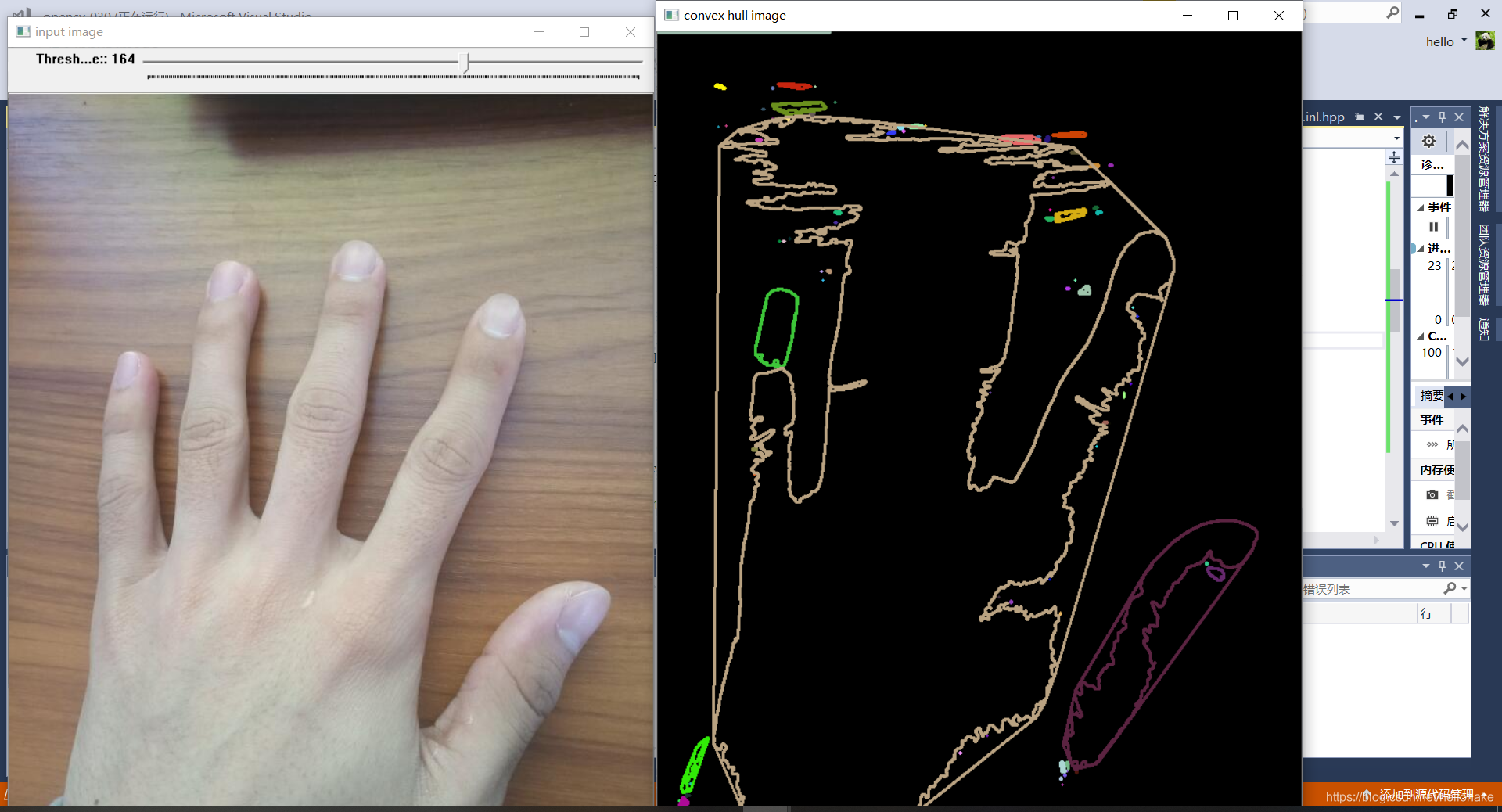
效果