1、目标检测基本概念
1.1 什么是目标检测
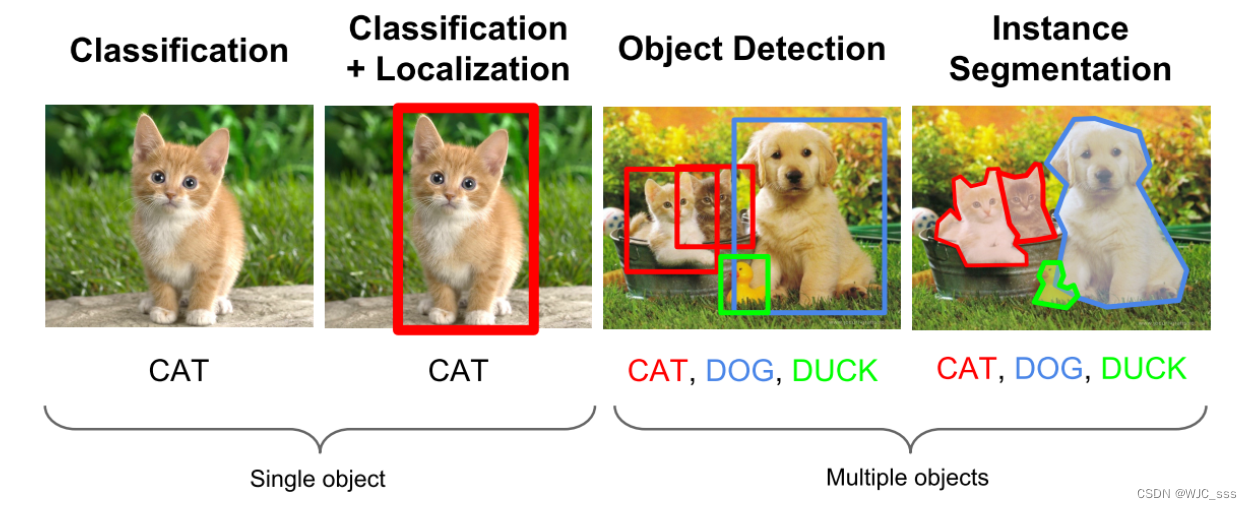
目标检测(Object Dectection)的任务是找出图像中所有感兴趣的目标(物体),确定他们的类别和位置。
1.2 目标检测要解决的核心问题
除图像分类外,目标检测要解决的核心问题是:
1.目标可能出现在图像的任何位置。
2.目标有各种不同的大小。
3.目标可能有各种不同的形状。
1.3 目标检测算法分类
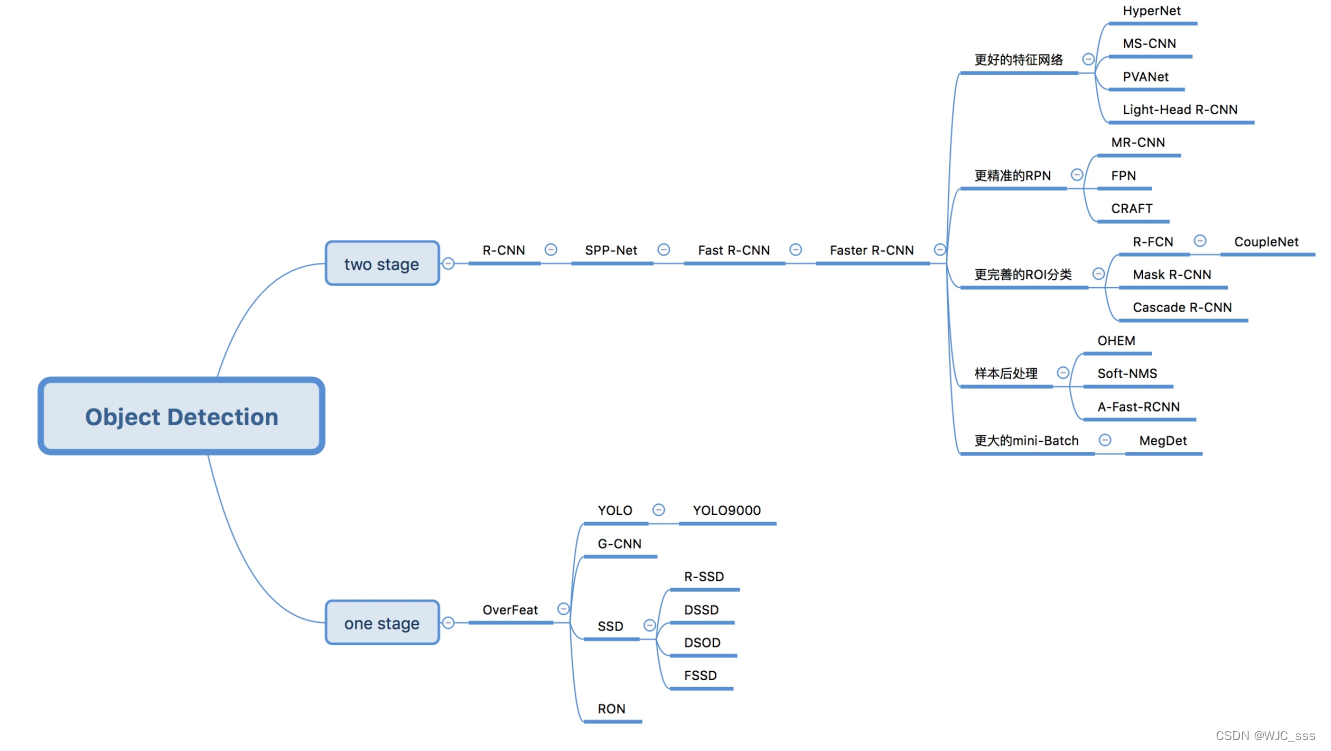
- Two stage目标检测算法
先进行区域生成(region proposal,RP)(一个可能包含待检测物体的预选框),再通过卷积神经网络进行样本分类。
任务:特征提取->生成RP->分类/定位回归。
常见Two stage目标检测算法有:R-CNN、SPP-Net、Fast R-CNN和R-FCN等。 - One stage 目标检测算法
不用RP,直接在网络中提取特征来预测物体分类和位置。
任务:特征提取->分类/定位回归。
常见的one stage目标检测算法有:OverFeat、YOLOv1、YOLOv3、SSD和RetinaNet等。
1.4 应用领域
- 人脸检测
- 行人检测
- 车辆检测
- 道路检测
- 障碍物检测
- 等等
2、Two stage 目标检测算法
2.1 R-CNN
2.1.1 R-CNN 创新点
- 使⽤CNN(ConvNet)对 region proposals 计算 feature vectors。从经验驱动特征(SIFT、HOG)到数据驱动特征(CNN feature map),提⾼特征对样本的表⽰能⼒。
- 采⽤⼤样本下(ILSVRC)有监督预训练和⼩样本(PASCAL)微调(fine-tuning)的⽅法解决⼩样本难以训练甚⾄过拟合等问题。
注:ILSVRC其实就是众所周知的ImageNet的挑战赛,数据量极⼤;PASCAL数据集(包含⽬标检测和图像分割等),相对较⼩。
2.1.2 R-CNN 介绍
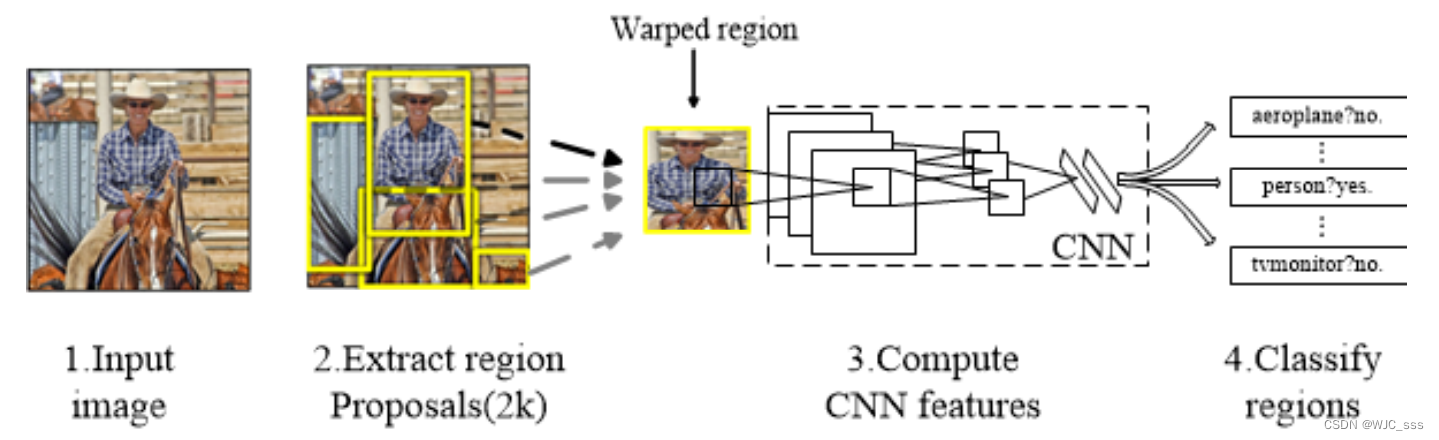
R-CNN作为R-CNN系列的第⼀代算法,其实没有过多的使⽤“深度学习”思想,⽽是将“深度学习”和传统的“计算机视觉”的知识相结合。⽐如R-CNN pipeline中的第⼆步和第四步其实就属于传统的“计算机视觉”技术。使⽤selective search提取region proposals,使⽤SVM实现分类。
-
预训练模型。选择一个预训练模型(pre-trained)神经网络(如AlexNet、VGG)。
-
重新训练全连接层使用需要检测的目标重新训练(re-train)最后全连接层(connected layer)。
-
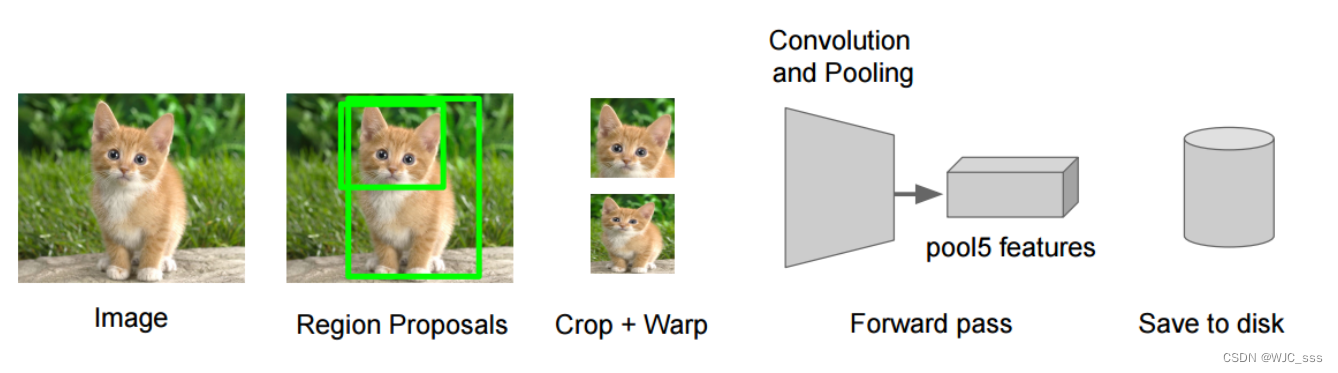
提取prosals并计算CNN特征。利用选择性搜索(Slective Search)算法提取所有prosals(大约2000幅images),调整(resize/warp)它们固定大小,以满足CNN输入,然后将feature map保存到本地磁盘。
-
训练SVM。利用feature map训练SVM来对目标和背景进行分类(每个类一个二进制SVM)。
-
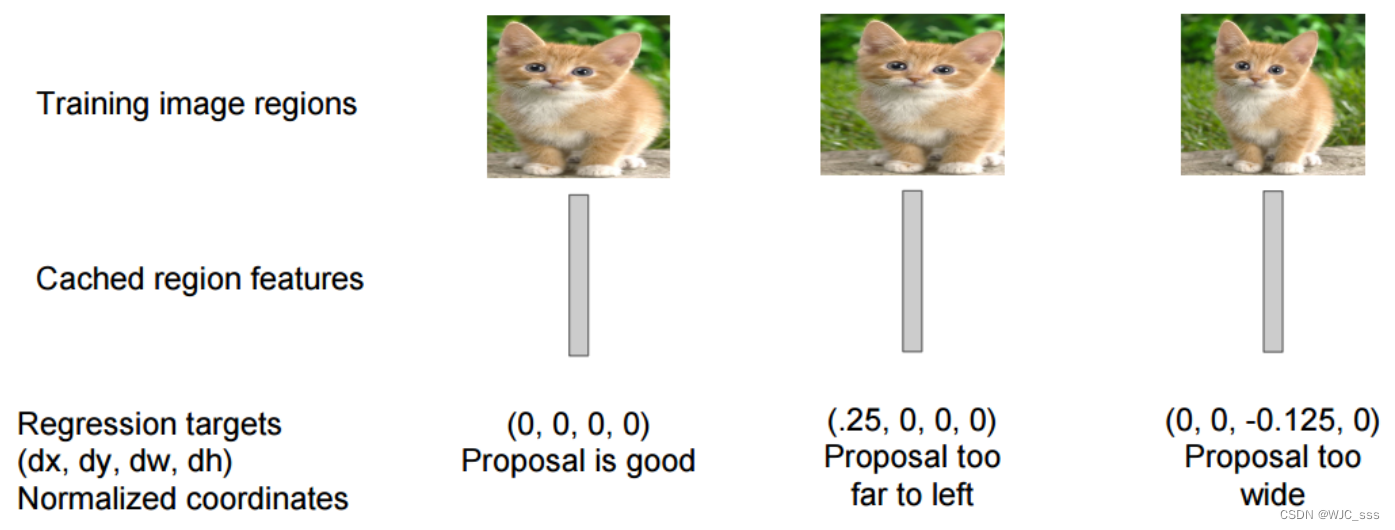
边界框回归(Bounding boxes Regression)。训练将输出一些校正因子的线性回归分类器。
2.1.3 R-CNN实验结果
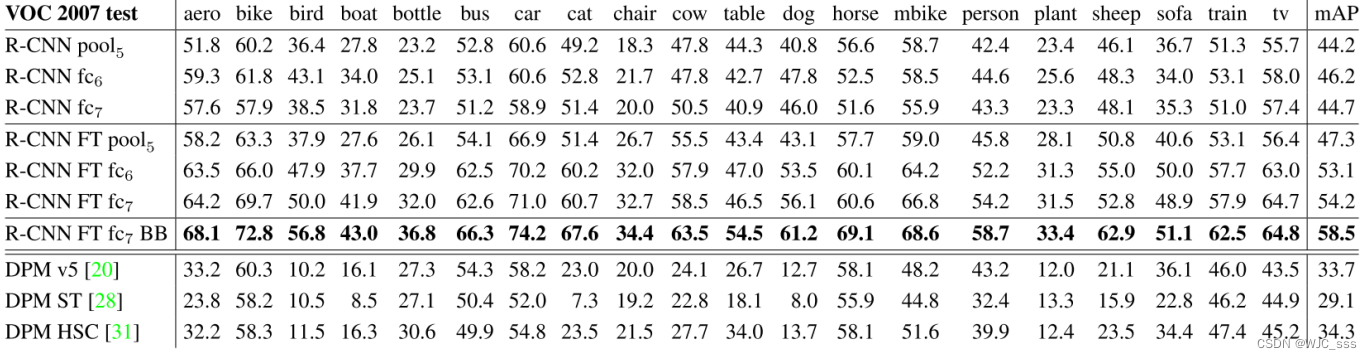
R-CNN在VOC 2007测试集上mAP达到58.5%,打败当时所有的⽬标检测算法。
2.2 Fast R-CNN
2.2.1 Fast R-CNN有哪些创新点?
- 只对整幅图像进行一次特征提取。
- ⽤RoI pooling层替换最后⼀层的max pooling层,同时引⼊建议框数据,提取相应建议框特征。
- Fast R-CNN⽹络末尾采⽤并⾏的不同的全连接层,可同时输出分类结果和窗⼝回归结果, 实现了end-to-end的多任务训练【建议框提取除外】,也不需要额外的特征存储空间【RCNN中的特征需要保持到本地,来供SVMBounding-box regression进⾏训练】。
- 采⽤SVD对Fast R-CNN⽹络末尾并⾏的全连接层进⾏分解,减少计算复杂度,加快检测速度。
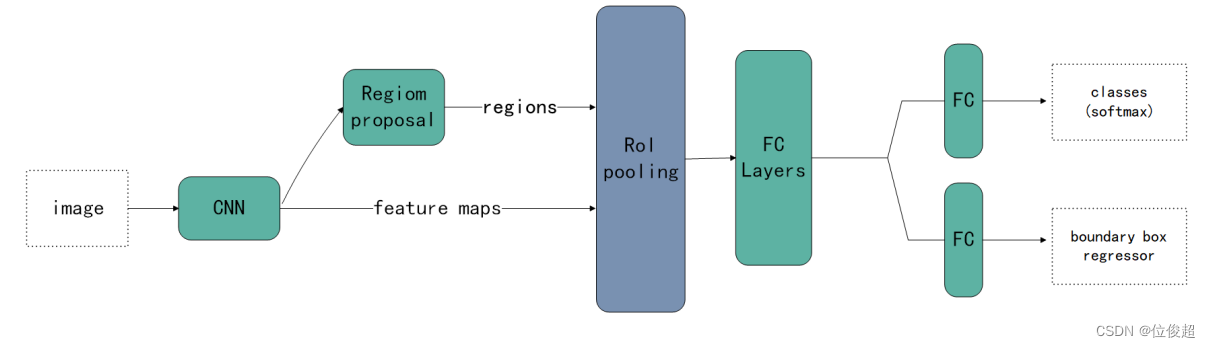
2.2.2 Fast R-CNN 介绍
Fast R-CNN是基于R-CNN和SPPnets进⾏的改进。SPPnets,其创新点在于计算整幅图像的the shared feature map,然后根据object proposal在shared feature map上映射到对应的feature vector(就是不⽤重复计算feature map了)。当然,SPPnets也有缺点:和R-CNN⼀样,训练是多阶段(multiple-stage pipeline)的,速度还是不够"快",特征还要保存到本地磁盘中。
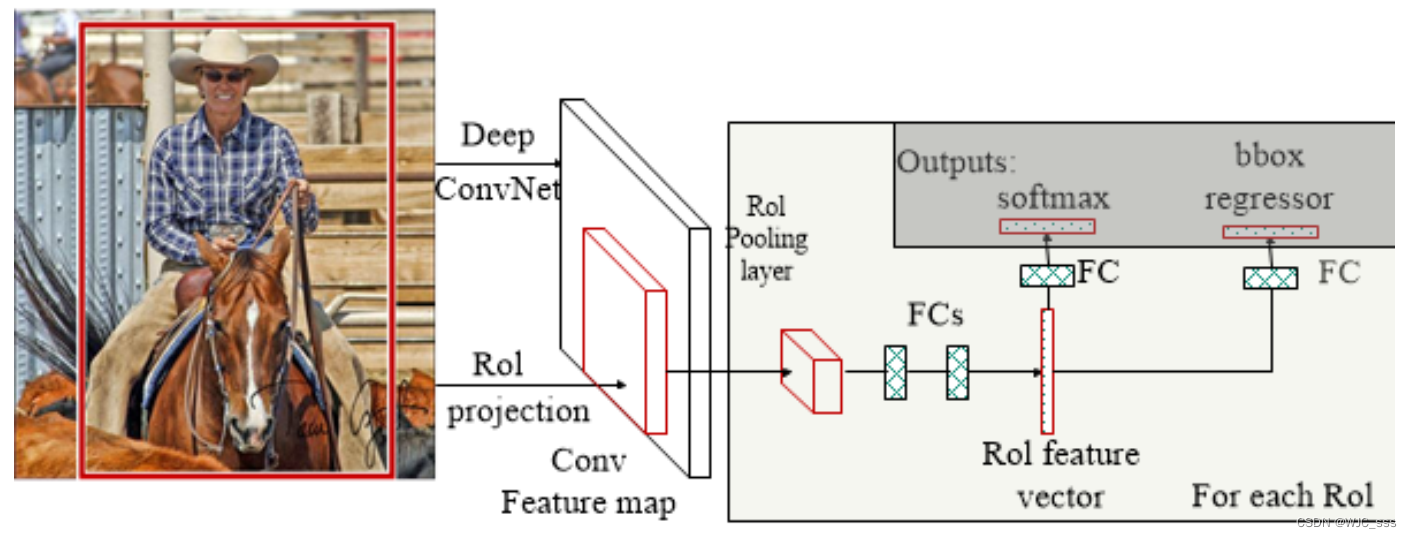
将候选区域直接应⽤于特征图,并使⽤RoI池化将其转化为固定⼤⼩的特征图块。以下是Fast R-CNN的流程图
2.2.3 RoI Pooling 层详解
因为Fast R-CNN使⽤全连接层,所以应⽤RoI Pooling将不同⼤⼩的ROI转换为固定⼤⼩。
RoI Pooling 是Pooling层的⼀种,⽽且是针对RoI的Pooling,其特点是输⼊特征图尺⼨不固定,但是输出特征图尺⼨固定(如7x7)
- 什么是RoI呢?
RoI是Region of Interest的简写,⼀般是指图像上的区域框,但这⾥指的是由Selective Search提取的候选框。
- 提取候选框
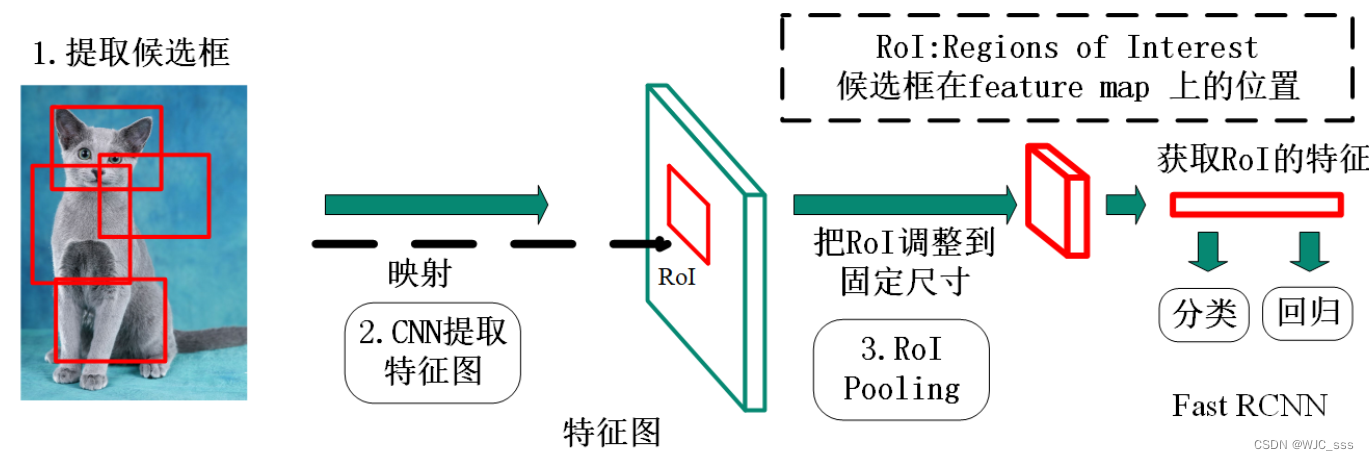
往往经过RPN后输出的不⽌⼀个矩形框,所以这⾥我们是对多个RoI进⾏Pooling。 - RoI Pooling的输入
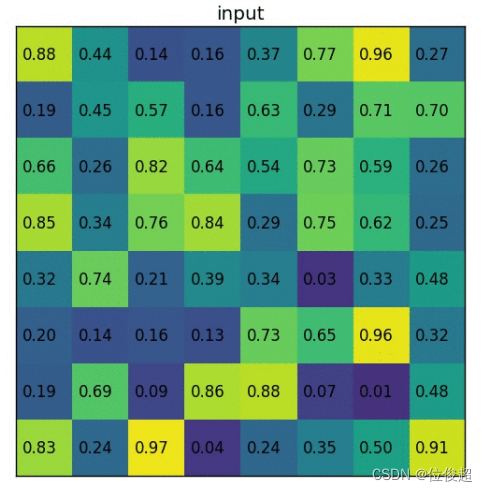
输⼊有两部分组成:- 特征图(feature map):指的是上⾯所⽰的特征图,在Fast RCNN中,它位于RoI Pooling
之前,在Faster RCNN中,它是与RPN共享那个特征图,通常我们常常称之
为“share_conv”; - RoIs,其表⽰所有RoI的N*5的矩阵。其中N表⽰RoI的数量,第⼀列表⽰图像index,其余四
列表⽰其余的左上⾓和右下⾓坐标。
- 特征图(feature map):指的是上⾯所⽰的特征图,在Fast RCNN中,它位于RoI Pooling
在Fast RCNN中,指的是Selective Search的输出;在Faster RCNN中指的是RPN的输出,⼀堆矩形候选框,形状为1x5x1x1(4个坐标+索引index),其中值得注意的是:坐标的参考系不是针对feature map这张图的,⽽是针对原图的(神经⽹络最开始的输⼊)。其实关于ROI的坐标理解⼀直很混乱,到底是根据谁的坐标来。其实很好理解,我们已知原图的⼤⼩和由Selective Search算法提取的候选框坐标,那么根据"映射关系"可以得出特征图(featurwe map)的⼤⼩和候选框在feature map上的映射坐标。⾄于如何计算,其实就是⽐值问题,下⾯会介绍。所以这⾥把ROI理解为原图上各个候选框(region proposals),也是可以的。
2.2.4 RoI 的具体操作
- 根据输入image,将ROI映射到feature map 对应位置
注:映射规则比较简单,就是把各个坐标除以“输入图片与feature map的大小的比值”,得到了feature map上的box坐标。
2.将映射后的区域划分为相同大小的sections(sections数量与输出的维度相同)
3.对每个sections进行max pooling操作。
这样我们就可以从不同大小的方框得到固定大小的相应的feature maps。值得⼀提的是,输出的feature maps的大小不取决于ROI和卷积feature maps大小。RoI Pooling 最大的好处就在于极大地提高了处理速度。
2.2.5 ROI Pooling的输出
输出是batch个vector,其中batch的值等于ROI的个数,vector的大小为channelwh;ROI Pooling的过程就是将一个个大小不同的box矩形框,都映射成大小固定(w*h)的矩形框。
ROI Pooling 示例
2.3 Faster R-CNN
2.3.1 Faster R-CNN有哪些创新点?
Fast R-CNN依赖于外部候选区域⽅法,如选择性搜索。但这些算法在CPU上运⾏且速度很慢。在测试中,Fast R-CNN需要2.3秒来进⾏预测,其中2秒⽤于⽣成2000个ROI。Faster R-CNN采用与Fast R-CNN相同的设计,只是它⽤内部深层⽹络代替了候选区域⽅法。新的候选区域⽹络(RPN)在⽣成ROI时效率更⾼,并且以每幅图像10毫秒的速度运行。
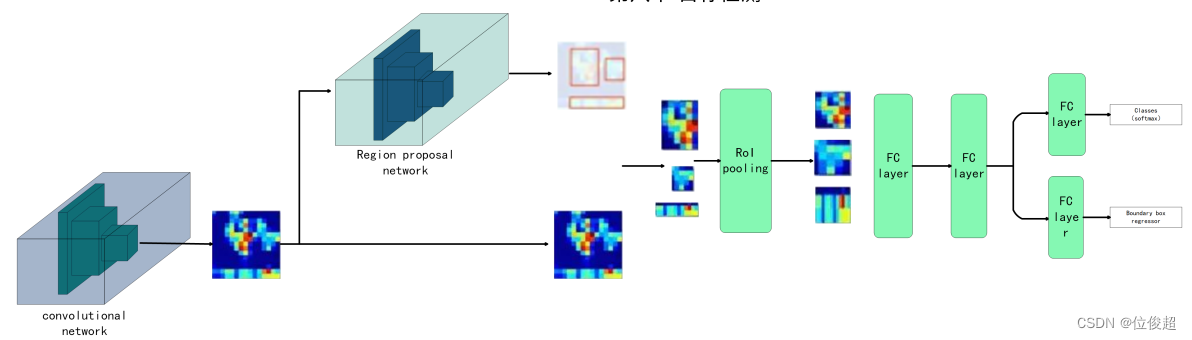
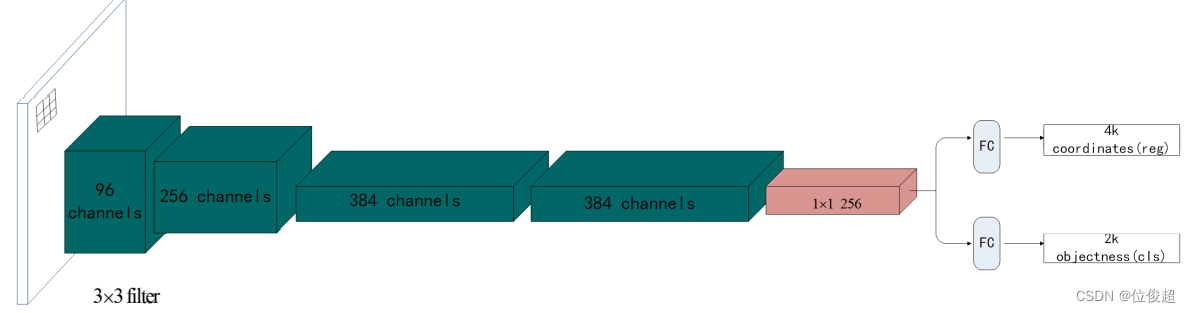
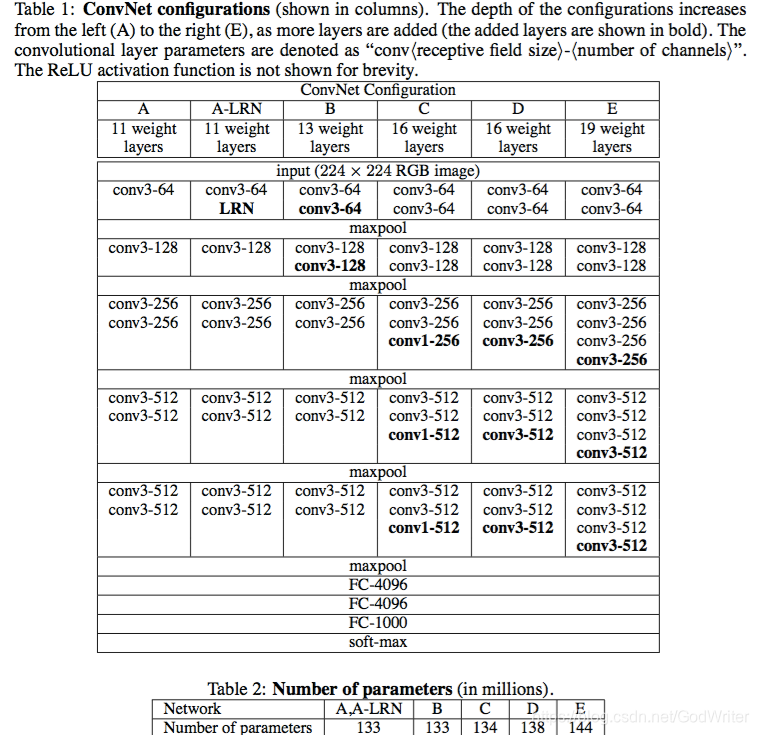
候选区域⽹络(RPN)将第⼀个卷积网络的输出特征图作为输⼊。它在特征图上滑动⼀个3×3的卷积核,以使用卷积⽹络(如下所示的ZF网络)构建与类别⽆关的候选区域。其他深度⽹络(如VGG或ResNet)可⽤于更全⾯的特征提取,但这需要以速度为代价。ZF网络最后会输出256个值,它们将馈送到两个独立的全连接层,以预测边界框和两个objectness分数,这两个objectness分数度量了边界框是否包含⽬标。我们其实可以使⽤回归器计算单个objectness分数,但为简洁起⻅,Faster R-CNN使⽤只有两个类别的分类器:即带有⽬标的类别和不带有⽬标的类别。